Вычислитель угла атаки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
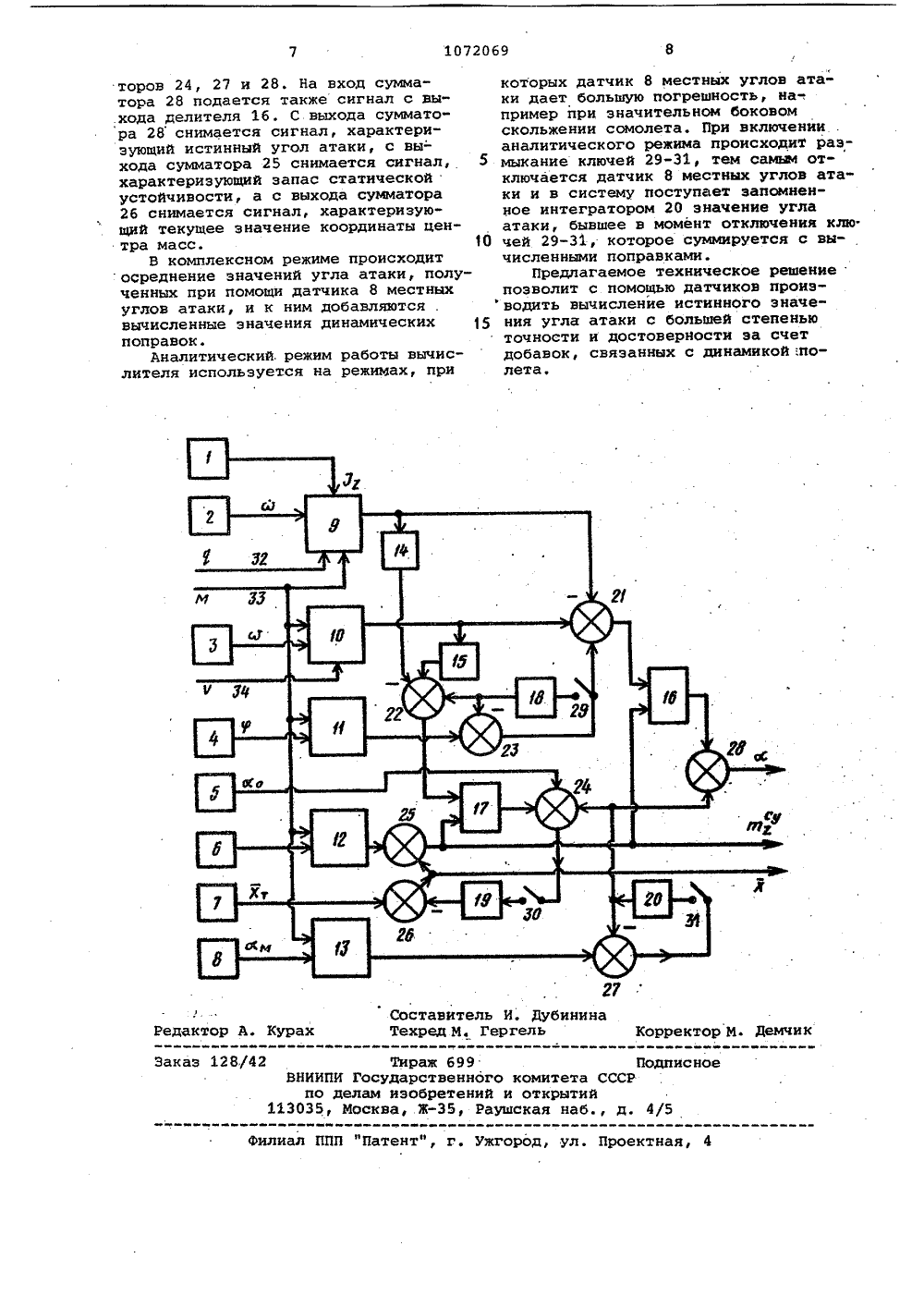
СОЮЗ СОВЕТСНИХСОЦИАЛИСТ ИЧЕСНИРЕСПУБЛИН 9) П 1) А 151) 06 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(71)Московский ордена Ленина и ордена Октябрьской Революции авиационный институт им, Серго Орджоникидзе(54) (57) ВЫЧИСЛИТЕЛЬ УГЛА АТАКИ, содержащий три сумматора и первый делитель напряжения, причем выход первого сумматора подключен к первомувходу второго сумматора, о т л и ч аю щ и й с я тем, что,.с целью повышения точности вычислений и расшире :.ния его функциональных воэможностейза счет одновременного вычислениякоординаты положения центра масс изапаса статической устойчивости движущегося объекта, в него введенызадатчик момента инерции объектаотносительно поперечной оси, датчикугловой скорости, датчик отклонениярУля высоты, задатчик балансировочного угла атаки, датчик положениязакрылок, задатчик балансировочногозначения координаты положения центрамасс, датчик местного угла атаки,пять функциональных преобразователей, два фильтра низкой частоты, второй делитель напряжения, три интегратора, пять сумматоров, три ключа,причем выходы задатчика момента инерции объекта относительно поперечнойоси и датчика углового ускорения подключены соответственно к первому ивторому входам первого Функционального преобразователя, третий и четвертый входы которого являются соответственно входом задания скоростного напора и входом задания числа Маха устройства, вход задания числа Маха соединен с первыми входами второго, третьего, четвертого и пятого функциональных, преобразователей, выход первого функционального преобразователя подключен к первому входу третьего сумматора и через первый Фильтр частот - к первому входу четвертого сумматора, выход которого соединен с первым входом первого делителя напряжения, выход последнего подключен к первому входу пятого сумматора, выход которого через первый ключ соединен с входом первого интегратора., выход последнего подключен Е к первому входу первого сумматора, второй вход которого соединей с выходом задатчика балансировочного значения координаты положения центра,масс, выход датчика угловой ско рости подключен к второму входу второго функционального преобразователя третий вход которого является входом задания скорости движения устройства выход второго функционального преобразователя соединен с вторым входом третьего сумматора и через второй фильтр низких частот подключен к второму входу четвертого сумматора, выход датчика отклонения руля высотысоединен с вторым входом третьегофункционального преобразователя, выход которого подключен к первому вхо ду шестого сумматора, выход которого соединен с третьим входом третьего сумматора и через второй ключ подключен к входу второго интегратора, вы.ход которого соединен с третьим входом четвертого сумматора и вторым входом шестого сумматора, выход задат. чика балансировочного угла атаки подключен к второму входу пятого сумматора, выход датчика положения закрылок соединен с вторым входом четвер1072069 того функционального преббразоватейя,выход которого подключен к второмувходу второго сумматора, выход последнего соединен с вторым входом первогоделителя напряжения, выход которогоподключен к первому входу седьмогосумматора, выход последнего являетсяпервым выходом устройства, вторымвыходом которого является выход второго сумматора, выход первого сумматораявляется третьим выходом устройства,выход датчика местного угла атаки Изобретение относится к автоматическому управлению и может быть использовано в системе автоматического управления движущимся объектом, например самолетом. 5Известен вычислитель угла атаки, предназначенный для выполнения вычислений с использованием сумматоров, множйтелей, делителей, фильтров и функциональных преобразователей 11 . щНедостатком вычислителя является то, что точность вычисления углов ата. ки в большой мере зависит от точности измерения расхода горючего бортовыми средствами. 15Наиболее близким по технической сущности к предлагаемому является вычислитель угла атакисостоящий из вычислителя воздушных параметров, трех акселерометров, вычислителя уг ла скольжения, делителя, восьми множителей, двух синусно-косинусных преобразователей, трех сумматоров, двух масштабных множителей и дифференцирующего элемента, причем вы ходы первого, второго и третьего акселерометров подключены соответственно к первым входам первого, второго . и третьего множителей, выход вычис" лителя угла скольжения соединен с входом первого синусно-,косинусного преобразователя, первый выход которого подключен к вторым входам второго и третьего множителей, а второй выход синусно-косинусного преобразователя соединен с вторым входом первого множителя, выход которого подключен к первому входу первого сумматора, выход последнего соединен с первым входом второго сумматора, выход которого подключен к первому входу четвертого множителя, выход последнего соединен с входом первого масштабного множителя, выход которого является выходом устройства и подключен к входу второго синусно-косинусного преобразователя, первый выход соединен с вторым входом пятого функционального преобразователя, выходкоторого подключен к первому входувосьмого сумматора, выход последнегочерез третий ключ соединен с входомтретьего интегратора, выходкоторогоподключен к третьему входу пятогосумматора и к вторым входам седьмогои восьмого сумматоров, выход третьегосумматора соединен с вторымвходом второго делителя напряжения. последнего соединен с первыми входами пятого и шестого множителей, а второй выход второго синусно-косинусного преобразователя подключен к первым входам седьмого и восьмого множителя, выход второго множителя соединен с вторыми входами пятого и седьмого множителей, выход третьего множителя подключен к вторым входам шестого и восьмого множителей, выходы пятого и восьмого множителей соединены соответственно с вторым и третьим входами первого сумматора, а выходы шестого и седьмого множителей подключены соответственно к первому и второму входам третьего сумматора, выход которого соединен с вторым входом четвертого множителя, первый выход вычислителя воздушных параметров подключен к первому входу делителя и входу дифференцирующего элемента, выход которого соединен с третьим входом второго сумматора, второй "выход вычислителя воздушных параметров подключен к второму входу делителя, выход которогочерез второй масштабный множитель соединен с четвертым входом второго сумматора.Отличительной особенностью из.вестного вычислителя является пред-. варительное вычисление текущей массы самолета с использованием зависимости видаС и.,Сф ра 5сСгде С и С - производные коэффициента подъемной силы поуглу атаки и отклонениюруля высоты;О - нормальное ускорение самолета;- угол отклонения рулявысоты;А; - угол атаки, измеренныйинтегральным способом;15 3скоростной напор,- площадь характерного сечения.Инерциальный угол атаки имеет погрешность, вызванную возмущениями дви жения самолета турбулентностью воздуше 5 ного потока 2 . Поэтому сигнал мас-. сы, измеренный таким образом, пропускают через Фильтр низкой частоты, затем по вычисленному значенИю массы производят вычисление истинного угла 10 атаки Ы. известным способом Недостатком известной схемы вычисления является зависимость точности вычисления массы от точности определения Сф и С;Ч ЧЦель изобретения - повышение . 20 точности вычислений угла атаки и рас-. ширение функциональных возможностей вычислителя за счет одновременного вычисления координаты положения центра масс и запаса статической устой чивости движущегося объекта.Указанная цель достигается тем, что в вычислитель угла атаки, содержащий три сумматора и первый делитель напряжения, причем выход пер- З 0 вого сумматора подключен к первому входу второго сумматора, введены эадатчик момента инерции объекта относительно поперечной оси, датчик углового ускорения, датчик угловой скорости, датчик отклонения руля высоты, задатчик балансировочного угла атаки, датчик положения закрылок, эадатчик балансировочного значения координаты положения центра масс, датчик местного угла атаки, 40 пять функциональных преобразователей, два фильтра низкой частоты, второй делитель напряжения, три интегратора, пять сумматоров, три ключа, причем выходы задатчика момента ивер ции.объекта относительно поперечной оси и датчика углового ускорения подключены соответственно к первому и второму входам первого функционального преобразователя, третий и чет вертый входы которого являются соответственно входом задания скоростного напора и входом .задания числа Маха устройства, вход задания числа Маха соединен с первыми входами вто рого, третьего, четвертого и пятого Функциональных преобразователей, выход первого функционального преобразователя подключен к первому входу третьего сумматора и через первый 60 фильтр низких частот - к первому входу четвертого сумматора, выход которого соединен с первым входом первого делителя напряжения, выход последнего подключен к первому входу пятого сумматора, выход которого через первый ;ключ соединен с входом первого интегратора, выход последнего подключен к первому входу первого сумматора, второй вход которого соединен с выходом задатчика балансировочного значения координаты положения центра масс, выход датчика угловой скорости подключен к второму входу второго ФунК- ционального преобразователя, третий вход которого является входом задания скорости движения устройства, выход второго Функционального преобразователя соединен с вторым входом третьего сумматора и через второй Фильтр низких частот подключен к второму входу четвертого сумматора, выход датчика отклонения руля высоты соединен с вторым входом третьего функционального преобразователя, выход которого подключен к первому входу шестого сумматора, выход которого соединен с третьим входом третьего сумматора и через второй ключ подключен к входу второго интегратора, выход которого соединен с третьим входом четвертого сумматора и вторым входом шестого сумматора, выход задатчи ка балансировочного угла атаки подключен к второму входу пятого сумматора, выход датчика положения закры-. лок соединен с вторым входом четвер-того функционального преобразователя, выход которого подключен к второму входу второго сумматора, выход последнего соединен с вторым входом первого делителя напряжения, выход кототорого подключен к первому входу седьмого сумматора, выход последнего является первым выходом устройства, вторым выходом которого являемся вы.ход второго сумматора, выход первого сумматора является третьим выходом устройства, выход датчика местного угла атаки соединен с вторым входом пятого Функционального преобразователя, выход которого подключен к первому входу восьмого сумматора, выход последнего через третий ключ соединен с входом третьего интегратора, выход которого подключен к третьему входу пятого сумматора и к вторым входам седьмого и восьмого сумматоров, выход третьего сумматора соединен с вторым входом второго делителя напряжения.На чертеже представлена структурная схема вычислителя угла атаки. Вычислитель состоит из задатчика 1 момента инерции объекта относительно поперечной оси, датчика 2 угло вого ускорения, датчика 3 угловой скорости, датчика 4 отклонения руля высоты эадатчика 5 балансировочного угла атаки, датчика б положения закрылок,эадатчика 7 балансировочного значения координаты положения центра1072069 Составитель И. ДубиниТехред М. Гергель ректорМ едакто ура емчи Заказ 128. 42 Тираж 6 ВНИИПИ Государстве по делам изобрете 3035, Москва, Жясное ного комитета ний и открыти Раушская наб д Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4 торов 24, 27 и 28. На вход сумматора 28 подается также сигнал с вы.хода делителя 16. С выхода сумматора 28 снимается сигнал, характеризующий истинный угол атаки, с вы- хода сумматора 25 снимается сигнал, 5 характеризующий запас статической устойчивости, а с выхода сумматора 26 снимается сигнал, характеризующий текущее значение координаты центра масс. 10В комплексном режиме происходит осреднение значений угла атаки, полученных при помощи датчика 8 местных углов атаки, и к ним добавляются вычисленные значения динамических 15 поправок.Аналитический. режим работы вычислителя используется на режимах, при которых датчик 8 местных углов атаки дает большую погрешность, на-, пример при значительном боковом скольжении сомолета. При включении аналитического режима происходит размыкание ключей 29-31, тем самыми отключается датчик 8 местных углов атаки и в систему поступает запомненное интегратором 20 значение угла атаки, бывшее в момент отключения клю. чей 29-31, которое суммируется с вычисленными поправками.Предлагаемое техническое решение позволит с помощью датчиков произ водить вычисление истинного значения угла атаки с большей степенью точности и достоверности за счет добавок, связанных с динамикой:.полета.
СмотретьЗаявка
3442141, 24.05.1982
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ АВИАЦИОННЫЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ
ВАСИЛЬЕВ ЕВГЕНИЙ ВЛАДИМИРОВИЧ, ВОЛГИН ВИКТОР ВАСИЛЬЕВИЧ, КЛЮЕВ ГЕОРГИЙ ИГНАТЬЕВИЧ, ПЕТРОВ СЕРГЕЙ ИВАНОВИЧ, САЧКОВ ГЕННАДИЙ ПАВЛОВИЧ, ЧИРСКОВ МИХАИЛ ЯКОВЛЕВИЧ, АБУТИДЗЕ ЗУРАБ СЕВЕРЬЯНОВИЧ
МПК / Метки
МПК: G06G 7/78
Метки: атаки, вычислитель, угла
Опубликовано: 07.02.1984
Код ссылки
<a href="https://patents.su/5-1072069-vychislitel-ugla-ataki.html" target="_blank" rel="follow" title="База патентов СССР">Вычислитель угла атаки</a>
Устройство для копирования линиисварного соединения

Номер патента: 795797
Опубликовано: 15.01.1981
МПК: B23K 9/10
Метки: копирования, линиисварного, соединения
...элемент 1, установленный на сварочном инструменте 2. Последний снабжен датчиком 3 положения и приводом 4 коррекции. Устройство содержит также сумматор 5, блок 6 регулируемого запаздывания и дополнительный блок 7 регулируемого запаздывания. Выход сумматора 5 соединен с входом блока 6 регулируемого запаздывания, а входы подключены к измерительному элементу 1 и дополнительному блоку 7 регулируемого запаздывания. Выход блока 6 регулируемого запаздывания соединен с приводом 4 коррекции и дополнительным блоком 7 регулируемого запаздывания, управляющий вход которого подключен к датчику 3 положения сварочного инструмента 2.Устройство работает следующим образом.При движении сварочного инструмента 2 вдоль линии соединения время...
Электромагнитный расходомер с частотным выходом

Номер патента: 972222
Опубликовано: 07.11.1982
Авторы: Вайкасас, Вирбалис, Раджюнас
МПК: G01F 1/58
Метки: выходом, расходомер, частотным, электромагнитный
...тзамыкающий ключ 4.На запоминающее устройство 5 при этом поступает напряжение С 2 О с выхода усилителя 20 2 сигнала датчика, которое пропорционально напряжению на электродах датчика в данный момент. Так как в момент равенства нулю тока в катушке формирователя 9 магнитного поля равна нулю и индукция магнитного поля в активной зоне датчика, то полезный сигнал на электродах датчика отсутствует, и напряжение .2 О, поступающее на запоминающее устройство 5, пропорционально разности электрических потенциалов Л Ьэв данный момент времени. В момент окончаЗ 0 ния импульса на выходе формирователя 12ключ 4 размыкается и запоминающим устройством 5 запоминается напряжение 12 О, Длительность импульса формирователя 12 должна удовлетворять условию...
Устройство для подавления неканонических пульсаций на выходе управляемого статического преобразователя

Номер патента: 1387133
Опубликовано: 07.04.1988
МПК: H02M 1/14
Метки: выходе, неканонических, подавления, преобразователя, пульсаций, статического, управляемого
...согласующего звена 2 с передаточной функцией К,(р), выходом соединенным с первым входом сумматора 3. Выход сумматора 3 соединен с входом частотноселективного звена 4 с передаточной функцией Кф(р), выход которого соединен с первым входом сумматора 5. Вторые входы сумматоров 3 и 5 соединены с выходом источника 6 сигнала задания (или внешнего контура регулирования). Выход сумматора 5 соединен с управляющим входом преобразователя 1.Устройство работает следующим образом.Рассмотрим прохождение управляющего сигнала через предлагаемое устройство при1условии, что К,(р)= - и пульсации наКв (р)выходе преобразователя отсутствуют. Предполагаем, что на вход преобразователя 1 подан сигнал задания. При соблюдении указанного выше условия на выходе...
Оптический датчик перемещения с фазовым выходом

Номер патента: 1647250
Опубликовано: 07.05.1991
Авторы: Киреева, Конаков, Мурашкина
МПК: G01B 21/00
Метки: выходом, датчик, оптический, перемещения, фазовым
...с помощью подборных элементов фазовращателя 5 и изменением с помощью масштабирующего звена 6 амплитуды сигнала Ооп таким образом, чтоОопбы отношение сигналов было равно 1 в точке баланса Хб, расположенной в конце диапазона измерения.При измерении перемещений в рабочем режиме модулятор 9 отключен от контрольного источника 11 излучения. При этом световой поток источником 11 излучения не излучается и контрольный фотоприемник 12 имеет большое внутреннее сопротивление, В результате этого резистор ЯЗ формирователя 13 не шунтируется внутренним сопротивлением фотоприемника 12 и с общей точки резисторов й 2 и КЗ сигнал в виде напряжения высокого уровня проходит через повторитель формирователя 13, и на его втором выходе появляется сигнал УПР...
221059

Номер патента: 221059
Опубликовано: 01.01.1968
Авторы: Демин, Нагирнер, Оболенский
МПК: G06F 11/00, G08C 25/04, H03M 13/51, H04L 1/20
Метки: 221059
...ло несовпадающих элемс полцительцой комбина счетчиком 7.с с ора 5 тся цтоь ций На чертеже приведен гаемого устройства дл сообщении.Устройство содержит модулю 2, ицвертор 5 бинации, сдвигающий р ного кода, сдвигаощий хема прсдладискретцыха олок-с я приема умматор 2 по тельной ком- дополпитсльР О ОСНОВНОГЗ После сравнения последних элементов ком.бцнаций по числу, записанному в счетчике 7, Определяется количество искаженньх элсмеи тов и при иска)ксннох ОдОх элементе комбиход 1, сдополнгистр 4 регцст Предлагаемое вестных тем, что модулю 2 под входу инвертора ВХОДОХ ДОПО;ЦИ из входов схемы мы сравнения и тельного регист гистра, а выход через счетчик к лей выдачи при ляет исправить том сообщении. р 4 последнего элеии сумматор 2 по...
Предыдущий патент: Устройство для моделирования зрительной аккомодации
Следующий патент: Устройство для регистрации однократных электрических импульсов
Случайный патент: Устройство для регулирования величины хода ползуна пресса