Система автоматической стабилизации плотности пульпы в слив классификатора при мокром процессе измельчения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1065021
Авторы: Бабец, Лапченко, Хорольский, Цагурия, Шубладзе
Текст
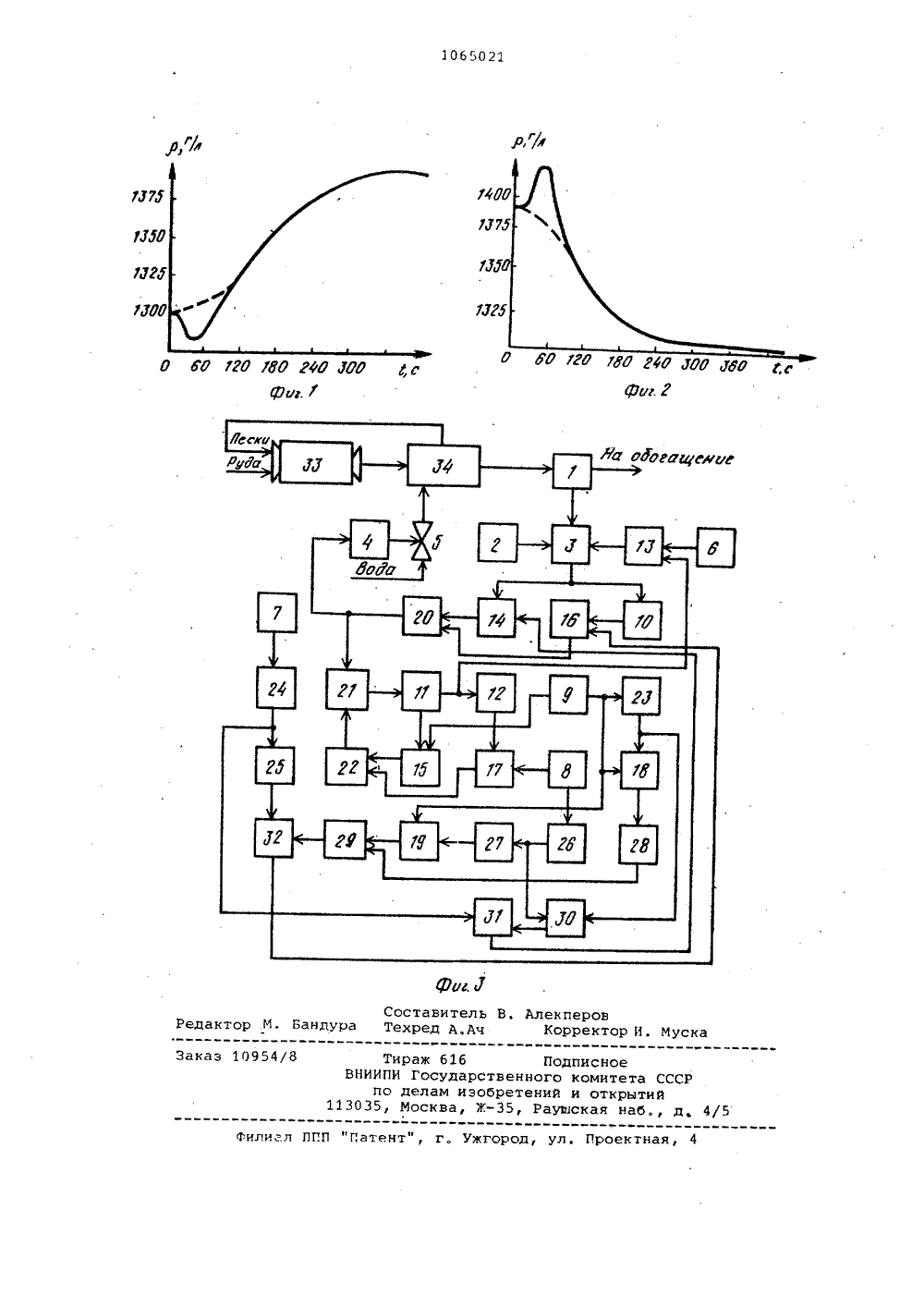
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН 19) (1 3(50 В 02 С 25 00 ОПИСАНИЕ ИЗОБРЕТЕНК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ агу ческаяия рудиках,ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТ(71) Криворожский ордена ТрудовогоКрасного Знамени горно-рудный институт и Ордена Ленина институт проблемуправления(56) 1, Марюта А. Н. Автоматиоптимизация процесса обогащенна магнитообогатительных фабрМ., "Недра", 1975, с, 197,2. Зубков Г. А. и др, Автоматизация процессов обогащения руд цветных металлов. М., "Недра", 1975,с. 78 (прототип).(54)(57) СИСТЕМА АВТОМАТИЧЕСКОИ СТАБИЛИЗАЦИИ ПЛОТНОСТИ ПУЛЬПЫ В СЛИВКЛАССИФИКАТОРА ПРИ МОКРОМ ПРОЦЕССЕИЗМЕЛЬЧЕНИЯ, включающая датчик и задатчик плотности пульпы, соединенныес первым и вторым входами элементасравнения, последовательно соединен-.ные исполнительный механизм и электрическую задвижку расхода воды,о т л и ч а ю щ а я с я тем, что, сцелью повышения точности стабилизации, она снабжена четырьмя задатчиками опорных сигналов, тремя интеграторами, семью блоками умножения,тремя блоками сложения, квадратором,пятью масштабными блоками, двумяблоками вычитания и двумя блокамиделения, причем выход первого задатчика опорного сигнала соединен спервым входом первого блока умножения, выход которого соединен с третьим входом элемента сравнения, выход элемента сравнения подключен квходу первого .интегратора и первомувходу второго блока умножения, выходкоторого соединен с первым входомпервого блока сложения, выход кото- . рого соединен с входом дополнительного механизма и первым входом второ го блока сложения, выход которого подключен к входу второго интегратора, первый, выход которого соединен с вторым входом первого блока умножения и с входом третьего интегратора, второй выход второго интегратора соединен с первым входом третьего блока умножения, выход которого подключен к первому входу третьего блока сложения, выход которого со единен с вторым входом второго блока сложения, выход первого интегратора соединен с первым входом четвертого блока умножения, выход которого сое-динен с вторым входом первого блока Ж сложения, выход второго задатчика опорных сигналов подключен к входу первого масштабного блока, выход которого соединен с первым входом первого блока деления и входом второго масштабного блока, выход которо- Е го соединен с первым входом второго блока деления, выход которого подклю чен к второму входу четвертого блока умножения, выходы третьего задатчика опорного сигнала соединены с вхо" дом третьего масштабного блока и с первым входом пятого блока умножения, второй вход которого подключен к выходу третьего интегратора, а выход пятого блока умножения соединен с вторым входом третьего блока сложения, выходы четвертого задатчика опорного сигнала соединен с вторым входом третьего блока умножения, входом квадратора, первым входом ше- фЬ стого блока умножения и первым входом седьмого блока умножения, выход которого соединен с первым входом первого блока вычитания, выход которого подключен к второму входу второго блока деления, выходы квадратора соединены с вторым входом шестого блока умножения и первым входом вто1065021 Изобретение относится к управлению процессами измельчения и классификации и может быть использовано наобогатительных фабриках цветной ичерной металлургии, химической и 5угольной промышленности при автоматизации процессов, имеющих неустойчивый числитель в передаточную функциюобъекта.Известна система автоматического 0регулирования процессов измельчения,включающая датчик плотности пульпыи задатчик плотности пульпы, соединенные с блоком сравнения, выход которого соединен с входом регулятора,выход которого через исполнительныймеханизм соединен с регулируемой задвижкой подачи воды в процесс 1 .Недостаток этой системы заключается в низкой стабилизации плотностипульпы в слив классификатора.Наиболее близкой к изобретеииюпо технической сущности являетсясистема автоматической стабилизацииплотности пульпы в слив классификато.ра при мокром процессе измельчения,включающая датчик и задатчик плотности пульпы, соединенные с первыми вторым вхоцами элемента сравнения,последовательно соединенные исполни-.тельный механизм и электрическую зад- З 0вижку расхода воды 23 .Однако известная система характеризуется низкими качеством управления и устойчивостью, вызванными тем,что используемые стандартные ПИ и ПИД.З 5регуляторы в контуре замкнутой систеьи не позволяют полностью учесть видпереходного процесса по каналу "изменение расхода воды в цикл - изменение плотности пульпы в слив 40классификатора". Это ведет к возникновению известных в практике автоматизации обогащения автоколебаний какготового продукта цикла, так и всегопроцесса в целом, что обуславливает 45невозможность достижения максимальной производительности цикла по готовому продукту и вызывает расстрой"ку последующих стадий обогащения.Целью изобретения является псвышение точности стабилизации,Цель,цостигается тем, что система автоматической стабилизации плотности пульпы в слив классификатора при мокром процессе измельчения, включающая датчик и задатчик плотности пульпы, соединенные с первым и вторым входами элемента сравнения, последовательно соединенные исполнительный механизм и электрическую задвижку расхода воды, снабжена четырьмя задатчиками опорных сигналов, тремя интеграторами, семью блоками умножения, тремя блоками сложения, квадратором, пятЬю масштабными блоками, двумя блоками вычитания и двумя блоками деления, причем выход первого эадатчика опорного сигнала соединен с первым входом первого блока умножения, выход которого соединен с третьим входом элемента сравнения, выход элемента сравнения подключен к входу первого интегратора, и первому входу второго блока умножения, выход которого соединен с первым входом первого блока сложения, выход которого соединен с входом исполнительного механизма и первым входом второго блока сложения,выход которого подключен к входу второго интегратора, первый выход которого соединен с вторым входом первого блока умножения и с входом третьего интегратора, второй выход второго интегратора соединен с первым входом третьего блока умножения, выход которого подключен к первому входу третьего блока сложения, выход которого соединен с вторым входом второго блока сложения, выход первого интегратора соединен с первым входом четвертого блока умножения, выход которого соединен с вторым входом первого блока сложения, выход второго задатчика опорных сигналов подключен к входу первого масштабного блока,выход которого соединен с первым входом, первого блока деления и входом второго масштабного блока, выход которого соединен с первым входом второго блока деления, выход которого подключен к второму входу четвертого блока умножения, выходы рого блока вычитания, выход которого соединен с вторым входом первого бло ка деления, выход которого подключен к второму входу второго блока умножения, выход третьего масштабного блока соединен с вторым входом второГо блока вычитания и входом четвертого масштабного блока, выход которогосоединен с вторым входом седьмогоблока умножения, выход шестого блокаумножения подключен к входу пятогомасштабного блока, выход которогосоединен с вторым входом первого блока вычитания, 1065021третьего задатчика опорного сигналасоединены с входом третьего масштабного блока и с первым входом пятогоблока умножения, второй вход которо"го подключен к выходу третьего интегратора, а выход пятого блока ум"ножения соединен с вторым входомтретьего блока сложения, выходычетвертого эадатчика опорного сигналасоединены с вторым входом третьегоблока умножения, входом квадратора,первым входОм шестого блока умножения и первым входом седьмого блокаумножения, выход которого соединен спервым входом, первого блока вычитания, выход которого подключен к второму входу второго блока деления,.выходы квадратора соединены с вторымвходомшестого блока умножения ипервым входом второго блока вычитания,выход которого соединен с вторым вхо дом первого блока деления, выход которого подключен к второму входу вто"рого блока умножения, выход третьегомасштабного блока соединен с вторымвходом второго блока вычитания и 25входом четвертого масштабного блоха,выход которого соединен с вторым входом седьмого блока умножения, выходшестого блока .умножения подключен квходу пятого масштабного блока, выход 30которого соединен с вторым входомпервого блока вычитания,На фиг. 1 показаны переходныепроцессы готового продукта цикла измельчения по каналу "изменение расхода З 5воды и слив классификатора - .изменение плотности пульпы в сливе" приуменьшении расхода воды на 6 от номинального; на фиг. 2 - то же, приувеличении расхода воды на 6; нафиг 3 - функциональная блок-схемасистемы автоматического управленияпроцессом мокрого измельчения замкнутого цикла,Предлагаемая система включает всебя датчик 1 плотности пульпы, задатчик 2 плотности, элемент 3 сравнения, исполнительный механизм 4, зад-вижку 5 расхода воды, эадатчики 6-9опорных сигналов, интеграторы 10, 11и 12, блоки 13-19 умножения, блоки 5020, 21 и 22 сложения, квадратор 23,масштабные блоки 24-28, блоки 29 и30 вычитания и блоки 31 и 32 деления.Измельчительный комплекс представ. 55лен мельницей 33, работающей в замкнутом цикле с классификатором 34.Сущность изобретения заключается в следующем.Реальная переходная характеристи ка объекта, представленная на фиг. 1и 2, аппроксимируется выражением вида, + 1)", (1)и(р) (т,р + 1) -:г гр65 где , К 2 - коэффициенты усиления)Т 1, Т - постоянные времени;хремя запаздывания.Выражение (1) путем разложенияехр 5) в ряд Тейлора сводится к болеепростому выражению видаУ(р) = (-Т + Е)(р + а, + а,) (2)1где а, а, - динамические параметрыпроцесса, что следует из вида пере-,ходных процессов, представленных нафиг, 1 и 2,для повышения устойчивости и качества замкнутой системы управлениянеобходимо синтезировать структурусистемы, которая при управлении компенсиррвала бы неустойчивый числитель передаточной функции объекта иодновременно обладала бы устойчивостью, равной максимальной степени устойчивости системы,Для выполнения этого введем вструктуру замкнутой системы управления, параллельно объекту, динамический фильтр видаФ(3)р + агр+ афподав на его вход результирующее управление от системы, а его выход по"дадим на вход блока сравнения системы управления с линейным ПИ-регулятором,В .этом случае передаточная функция замкнутой системы .имеет видУ(р) = Кр(р + а р + ар+ ККР+ КК 1) (4)где К; и К - настройки ПИ"регулятор Ира.Для синтеза оптимальной структуры системы управления объектом (2)необходимо выбрать такие настройкипараметров Кп и Ки, чтобы устойчивость системы для объекта (2) совпацала с максимальной степенью устой"чивости для замкнутой система ви,да (4),Максимальная степень устойчивостиЭор равна крайнему правому корню рфхарактеристического уравнения замкнутой системы (4), т.е. 50 = -рУНайдем р, продифференцировавдважды знаменатель выражения (4) иприравняв его нулю,Для того, чтобы качество Управления объектом (2) было не хуже качества управления объектом (4) илиобъектом (1), "наслаиваем" все корни на р.передаточная функция регулирующей части системы равна1+1(2 Ъ,-9 а,) Р+аг(18 а,-14 а,)Таким образом, оптимальная структура системы управления синтезирована и включает в себя элементы с пере - даточными функциями (3) и (5), что соответствует передаточной Функции замкнутой системы (4), где параметры Т, К, а и а определяются первоначально для снятых экспериментальных переходных процессов вида, иэоб раженного на Фиг. 1 и 2.учитывая вышеизложенное, синтезированная система управления можетбыть эагисана:в виде следующей систе мы уравнений: Ос):ццадоЕМ = Х -Х-Х,х (м:Ух, О)х,(Ц =а,хВ)а,х,Щ:ОМ,20где 1,Р(1) и х (1) - это первая и вторая производные величины х,р(1). 25Система автоматического управления, изображенная на Фиг. З,реализует разработанную оптимальную структу. ру и работает следующим образом,Сигнал текущей плотности пульпы 30 в сливе классификатора от датчика 1 поступает на элемеит 3 сравнения, где вначале складывается с сигналом от первого блока 13 умножения, затем сравнивается с заданным значением 35 плотности от задатчика 2 плотности, Величина рассогласования с выхода элемента 3 сравнения постугает на блок 14 умножения и через интегратор 10 на блок 16 умножения, В бло ках 14 и 16 умножении сигналы рассогласования умножаются на сигналы с блоков 31 и 32 деления соответственно и затем суммируются в блоке 20 сложения. С блоков 31 и 32 деления поступают сигналы в блок 20 сложения, сигнал которого определяется выражением (5). Он поступает на исполнительный механизм 4 задвижки 5 расхода воды, оптимальным образом изменяя расход воды в слив классификато ра, не допуская возникновения аварийных колебаний.Одновременно с этим сигнал управйения с выхода блока 20 сложения постуПает на блок 21 сложения, где 55 складывается с сигналом от блока 22сложения, Сигнал после второго интегратора 11 умножается в блоке 13 умножения на величину параметра Т 4, задаваемую эадатчиком 6 опорных сигналов, Величины аи а задаются эадатчиками 8 и 9 опорных сигналов.Заданное значение параметра К,заданное эадатчиком 7 опорных сигналов, поступает последовательно намасштабные блоки 24 и 25.Заданное значение параметра а поступает на квадратор с выхода коВторого сигнал, равный а, поступаетна блок 18 умножения, в котрром онумножается на величину аот задатчика 9 опорных сигналов. Сигнал с выхода блока 18 умножения, равный а,поступает на масштабный блок 28, Сигнал величиной а 4 от задатчика 8опорных сигналов поступает последовательно на масштабные блоки 26 и 27,а в блоке 19 умножения сигнал, равный а, умножается на величину а отзадатчика 9 опорных сигналов.Таким образом, система управляетрасходом воды в слив классификатораи всем процессом в целом, не допуская. возникновения аварийных колебаний готового продукта в сливе класси.фикатора, Дисперсия колебаний грансостава снижается на 25-30, повышается общая производительность циклапо готовому классу,Управление процессом измельченияобеспечивает поддержание оптимальнойпроизводительности иэмельчительногоагрегата по исходному питанию с учетом измельчаемости и крупности исходного продукта, заданных требованийпо гранулометрическому составу засчет поддержания оптимального заполнения и оптимальной плотности пульпыв сливе классификатора, соответствующих качеству перерабатываемого материалаулучшается качество управленияпроцессом за счет учета структурыпередаточной функции объекта при формировании управлений,Выход готового продукта увеличивается на 0,22, заметно снижаютсяколебания гранулометрического состава, увеличивается годовое производство концентрата на 0,5, снижаютсяпотери полезного компонента в хвостах на 0,2.10 б 5021 О кпероворректор И. Муска Заказ 10954/ Филиал ППП "Патент", г, Ужгород, ул. Проектная, 4 ДЯ юг 780 УЮ Мд ЛЮ Рог.Составитель В.едактор М. Бандура Техред А.Ач Тираж 61 б ВНИИПИ Государств по делам изобр113035, Москва, ЖПодписноенного комитета СССРтений и открытиЯ Раушская наб., д,
СмотретьЗаявка
3480007, 02.08.1982
КРИВОРОЖСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНО-РУДНЫЙ ИНСТИТУТ, ОРДЕНА ЛЕНИНА ИНСТИТУТ ПРОБЛЕМ УПРАВЛЕНИЯ
БАБЕЦ ЕВГЕНИЙ КОНСТАНТИНОВИЧ, ХОРОЛЬСКИЙ ВАЛЕНТИН ПЕТРОВИЧ, ШУБЛАДЗЕ АЛЕКСАНДР МИХАЙЛОВИЧ, ЦАГУРИЯ НУГЗАР НОДАРИЕВИЧ, ЛАПЧЕНКО НИКОЛАЙ ПЕТРОВИЧ
МПК / Метки
МПК: B02C 25/00
Метки: автоматической, измельчения, классификатора, мокром, плотности, процессе, пульпы, слив, стабилизации
Опубликовано: 07.01.1984
Код ссылки
<a href="https://patents.su/5-1065021-sistema-avtomaticheskojj-stabilizacii-plotnosti-pulpy-v-sliv-klassifikatora-pri-mokrom-processe-izmelcheniya.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматической стабилизации плотности пульпы в слив классификатора при мокром процессе измельчения</a>
Устройство для умножения десятичных чисел

Номер патента: 1198514
Опубликовано: 15.12.1985
Авторы: Кожемяко, Красиленко, Мартынюк, Натрошвили, Тимченко
МПК: G06F 7/52
Метки: десятичных, умножения, чисел
...соединен с первыми фотоприемниками узлов 1.-го столбца кодирующей матрицы, 1-й оптический канал второго входа информационной матрицы суммирования оптически соединен с вторым и третьим фотоприемниками узлов 1-й строки кодирующейматрицы, первые выводы первых фотоприемников в узлах кодирующей матрицы соединены с шиной питания, а вторые выводы соединены через вторыефотоприемники в узлах кодирующей матрицы с базами соответствующих транзисторов регенеративных оптронов оптоэлектронного модуля результата сложения, вход разрешения сложения матрицы суммирования соединен с управляющим входом управляющего ключа,10 Изобретение относится к,вычислительной технике и может быть использовано в оптоэлектронных устройствах.выполняющих операции над...
Способ диагностирования состояния входов-выходов транзисторно-транзисторных логических устройств

Номер патента: 1735850
Опубликовано: 23.05.1992
Авторы: Анкудинов, Беленький, Шепелев
МПК: G06F 11/00
Метки: входов-выходов, диагностирования, логических, состояния, транзисторно-транзисторных, устройств
...мультиплексор). Пля наглядности следуе показать не толькоразность токов, но и величины самихтоков, протекающих в шине питания и, общей шине объекта диагностирования,5 1735850На первом этапе процесса диагнос - будет тирования, т.е. при отключенных вы- табл. ходах ИС;Е 155 КП 2 исправный обьект иметь реакции, приведенные в1. Таблица 1 Реакции 314 15 1 ка Г, ка 31,а 1 136,0 36,0 0,0 1 1 1 30 4 29 31 Эбе 2 3511 1 е Эбв 2 35 в 11 5 1 1 1,0 1 1 1 .1 1 6 1 1 10 1 1 1 1 1 1 1 7 1 1 1 1. О 1 т1,. ф 8 1 1 11 1 0 1 11 1 30,4 29,3 1,1 91 11 1 1 0 1 11 Э 6,2 35,1 1,1 1 О 1 1 1 1 1 1 1 1 01 1 -"- и и 1 1 .1 1 1 1 1 1 1 0 1 1 и.121Ои 13 1 11 . 1 1 1 1 11 0 -"- -ие Ф П р н и е ч а н и е. 1, - величина тока, протекающего в шине питания,1 ф -...
Защитно-герметический блок входа

Номер патента: 367227
Опубликовано: 01.01.1973
Авторы: Ануфриев, Илюкнн, Кашкинов, Кудр, Лугачев, Маштаков
МПК: E06B 5/10
Метки: блок, входа, защитно-герметический
...естен за нитпо-Гсрд я, В е.1 к) ч 13 н) и)и Й и 0 г 0 т н 0НСРСГОРОДЕ(, ОПОРНО РДР с 1 И Ванн 51.Ц(.Л Ь И 300 Р С ТЕ 1 1 51 еР)л:ы 1 , В еОГОРьс 13.(од 51 Г елиноь(. 31- ПОРЫ с).1 протиоположной от петель стороне01 ОР)51 )Л:(Л .Т СЕОС О ГГМОС(.;15 и С 15 -5 00,БОГО 130.3 ГермстичноЙ нсрсГороде Брн0 Г 1)Л 1 с 111;1;3;11, ) 13 Л 1;11О 1,; Л1 ОС 11 и я 5),1(:с(е Го м В 0 лоее 5113 г не Гся н 0 г От н О:1 В(. р н, н л и Я п р Я ВГ 1 500 и и ( и л г ь 1 0 е 0- ТОРОВ, Бзс 1 ИМОДСИСТ 310011 с С БПНТ 013 Ы.131 10 с пораи а, нй;1 сижно нс 130 н 311 ется Г(рмсти 111;51С Р (0 Р 0 Д Е (111,10 ГВО д 1 ер; посре:1 ст 30 пете;1 ь 7 н;113(НП 11)с 1 ЮТ И 1 ОПОРН) 10 РЛ 1 У с), Г 111 ГОДЛР 5 Е) 11)0 С.ОДТ 0 1 Е)ьс 31(.Зс 1 ЕРЬ 31(. РО(М(1.15 3 с 1 Д р...
Электропривод

Номер патента: 782114
Опубликовано: 23.11.1980
Авторы: Ерухимович, Кривицкий, Эпштейн
МПК: H02P 5/36
Метки: электропривод
...пресб а22 связаны с вь овходы пре разователей 1 выходами да 1 чиков 26- 3 и питают асинхронный ви 428 фаэных токов.ны двигатепь тоП еков. ками, вследствие чего возникает моментреобразователь содержит также уэпы 5 на валу стр й29 39 суммирования. Бпок 40 является, стремящи ся поддержать ско остьрзадатчиком потокосцепления ротора 9,1 м ф)а рма и фаза токов статора двигателя сооткоторое может поступать и по анне 41 ветствовала заданной в вот блока ручного задания.ала заданно в возможно болеешироком диапазоне частот, в датчике 13о разом.бЗпектропривод работает следующим фазных а ий фх напряжен формируются сигналызадания фазных напряжений О, 0 иНа входе регупятора скорости 6 в2 и0, которые поступают на входы бпосумматоре 29 сравниваются...
Амплитудно-дифференциальный нульорган

Номер патента: 892417
Опубликовано: 23.12.1981
Авторы: Памфилов, Прокунцев, Шаров, Шаронов
МПК: G05B 1/01
Метки: амплитудно-дифференциальный, нульорган
...),на выходе аттенюатора 9 - пульсирующее напряжение (Фиг. 2, строка Ь ),ослабленное навеличину, равную потерям напряжения У в фильтре 7.Кроме того, найряжение 01(фиг,2,строка а) с выхода блока 1 согласования поступает на первый формирователь 5 импульсов. Короткие импульсы с выхода первого формирователя 5импульсов поступают на первый управляющий вход реверсивного счетчика 11.Напряжение О, (фиг. 2, строка 4 )с выхода блока 2 согласования поступает на второй формирователь б импульсов.В начальный момент времени коэффициент передачи делителя 8. напря 1жения равен в ,где и - количествоидискретных уровней сигнала Б(Фиг.2,строка Ь ). В момент 1 прохождениясигналачерез нулевой уровень(фиг. 2, строка а ) с выхода второгоформирователя б...
Предыдущий патент: Способ управления работой шаровой барабанной мельницы
Следующий патент: Способ автоматического управления дробильным комплексом из дробилок среднего и мелкого дробления
Случайный патент: Способ возведения армопородобетонной блочной крепи