Система числового программного управления группой станков
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1004976
Автор: Потехин
Текст
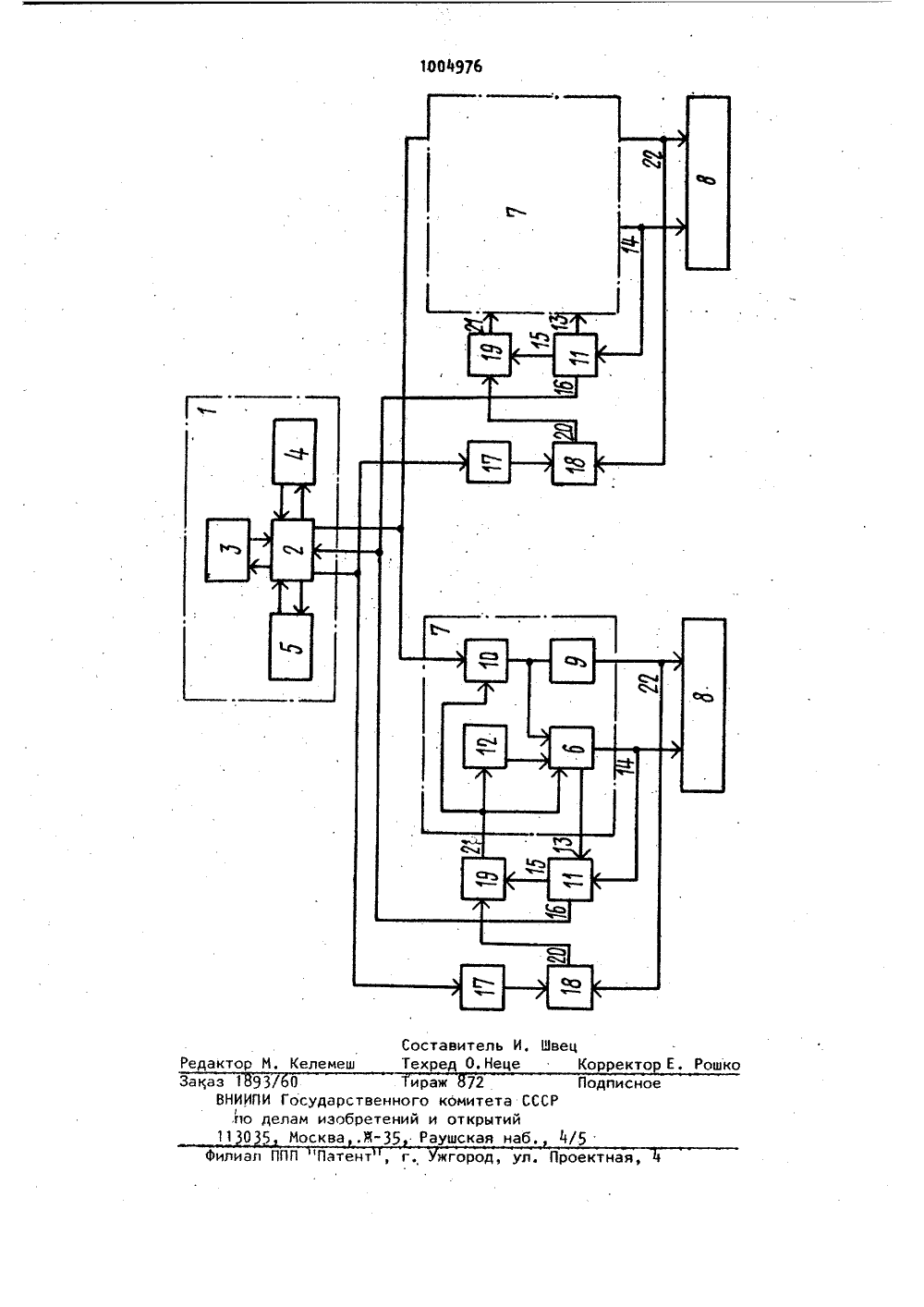
О П И С А Н И Е (1 11 оо 4 отоИЗОВРЕТЕНИЯ Союз СоветскихСоциалистическихРеспублик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(23)Приоритет Опубликовано 15, 03, 83. Бюллетень,Ре 10Дата опубликования описания 18.03.83 пв девам кэееретеккй и открытий(54) СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ ГРУППОЙ СТАНКОВ1Изобретение относится к программному управлению станками, конкрет"но кустройствам программного управления от электронной вычислительноймашины группой станков,По основному авт. св. Ю 433450 из 5вестна система числового программного управления группой станков, содержащая электронную вычислительную машину (ЭВМ), связанную с устройствами станочного управления,каждое из которых выполнено в видеинтерполятора, к входам которогоподсоединен пульт оператора, и блоксвязи, а выход интерполятора и блокасвязи с подключенным к нему дешифратором технологических и вспомогательных команд соединен с соответствующим входом станка, а также блокформирования динамического приоритета, входы сигнала конца обработкикадра и импульсов унитарного кода которого подключены к интерполятору,а выходы кода приоритета и сигналов 2торможения соединены соответственнос ЭВМ и блоком связи, пультом оператора и интерполятором Г 11,В основном изобретении программыобработки деталей при их первоначальном вводе записываются через устройство ввода-вывода и хранятся вовнешнем ЗУ. Отдельные блоки программ,по которым предстоит обрабатывать детали на станк, переписываются про"цессором из внешнего ЗУ в оператив"ное ЗУ. Из оперативного ЗУ процессор по запросам выдает в устройствастаночного управления отдельные кадры программ обработки деталей, интерполятор производят интерполяциюгеометрической информации, содержащейся в кадре, и выдачу сигналов унитарного кода на приводы станка, адешифратор дешифрирует и выдает настанок технологические и вспомогательные команды.В процессе отработки станком (вывода иэ оперативного ЗУ в устройствостаночного управления) очередного блока программы обработки из внешне" го ЗУ в оперативное ЗУ переписывается последующий блок программы с тем, цтобы по окончании отработки очеред" ного блока без перерыва перейти к от. работке последующего.По окончании отработки каждого кадра программы интерполятор выдает на блок Формирования динамического 1 Е приоритета сигнал, по которому формируется запрос низшего приоритета и поступает в процессор.В случае отсутствия из ЭВМ информации на запрос низшего приоритета 1 З и наличия на входе блока формирования динамического приоритета им" пульсов унитарного кода блок формирования динамического приоритета формирует новый запрос с более высоким приоритетом и т.д. Процесс повышения приоритета продолжается о тех пор, пока не будет получена информация из ЭВМ или не будет достигнуто заранее заданное предель- р ное значение приоритета. Если инФормация из ЭВМ не будет получена и на запрос высшего приоритета, то блок формирования динамического приоритета Формирует сигнал торможения, поступающий в блок связи для блокировки поступления из ЭВМ очередного кадра, в интерполятор для торможения движения и на пульт оператора для сигнализации об аварийном остано 354 Работа станка после останова может быть возобновлена только после устранения причины задержки информации из ЭВМ.40Недостатком известной системы является то, что на вход устройства станочного управления из оперативного ЗУ может поступать недостоверная информация, возникающая вследствие45 ошибок при передаче информации из внешнего ЗУ в оперативное ЗУ, что может привести к браку или поломке станка. Кроме того, в связи с тем, что останов станка производится в произвольный .момент времениможет оказаться, что в этот момент инструмент находится в контакте с обрабатываемой поверхностью, в результате чего (вследствие отжимаИ инструмента в процессе обработки) при останове появляется врезание инструмента в деталь, что в некоторых случаях может привести к бракудетали.Целью изобретения является повышение надежности системы путем формирования команды аварийного остановав моменты отсутствия контакта инструмента с обрабатываемой поверхностью в случае выявления ошибкипередачи информации из внешнего ЗУв оперативное ЗУ.Поставленная цель достигается тем,что в системе ЧПУ группой станковкаждое устройство станочного управления дополнительно содержит последовательно соединенный блок запомина"ния команды останова, элемент И иэлемент ИЛИ, вторым входом подключенного к выходу сигналов торможенияблока Формирования динамическогоприоритета, а выходом - к входу пульта оператора, второму входу блокасвязи и третьему входу интерполятора, второй вход элемента И соединенс выходом дешифратора технологических и вспомогательных команд, а входблока запоминания команд остановаподключен ко второму выходу электронно-вычислительной машины.На чертеже представлена блок-схема предлагаемой системы,Схема включает электронную вычистельную машину (ЭВИ) 1, процессор 2,оперативное запоминающее устройство3, внешнее ЗУ 4, устройство 5 вводавывода, интерполятор 6, устойство 7станочного управления, станок 8, дешиФратор 9 технологических и вспомогательных команд, блок 10 связи,блок 11 формирования динамическогоприоритета, пульт 12 оператора, вы"ход 13 сигнала конца отработки кадра, выход 14 унитарного кода, выход15 сигнала 01 торможения выход 16кода приоритета, блок 17 запоминания команд останова, элемент И 18,элемент ИЛИ 19, выход 20 сигнала фторможения, выход 21 сигнала с торможения, выход 22 технологическихи вспомогательных команд,Система содержит ЭВМ 1, включающую процессор 2 и подключенные кнему оперативное ЗУ 3, внешнее ЗУ 4,устройство 5 ввода-вывода; устройство 7 станочного управления, включающее блок 10 связи, вход которого подключен к выходу ЭВИ 1, а выход подключен к входам интерполятора 6 идешифратора 9 технологических и вспомогательных команд, выходы 14 и 2204976 6 5 10 которых унитарного кода и команд подключены к станку 8, кроме того, выход 14 унитарного кода интерполятора б подключен к входу блока формирования динамического приоритета,. ко второму входу которого подключен выход 13 конца отработки кадра интерполятора б. Выход 16 кода приоритета подключен ко входу ЭВМ а выход пульта оператора подключен к входу интерполятора, Система дополнительно содержит блок 17 запо-. минания команд останова, вход которого подключен ко второму выходу ЭВИ 1, а выход подключен ко входу схемы И 18, ко второму входу которой подключен. выход 22 команд дешифратора 9. Выход 15 сигнала с тормо-. жения блока 11 формирования динамического приоритета подключен к первому входу элемента ИЛИ 19, .Выход 20 сигнала Ь торможения схемы .И 18 подключен ко второму входу элемента ИЛИ 19, а выход 21 сигнала с торможения подключен ко входам пульта 12 оператора, блока 10 связи и интерполятора б.Выход 15 сигнала ы торможения соответствует выходу 15 сигнала торможения основног изобретения, а выход 21 сигнала с торможения является дизьюнкцией сигналов 15 и 20 и , по своему воздействию на пульт 12 оператора, блок 1 О связи и интерполятор б идентичен действию на эти блоки сигнала 15 выхода основного изобретения.Рабата предложенной системы осуществляется следующим образом.При первоначальном вводе программ обработки деталей с устройства 5 ввода-вывода во внешнее ЗУ 4 в процессоре 2 производится анализ вводимой программы и в кадрах программы с холостыми перемещениями (т,е. в кадрах с перемещениями, не содержащими обработки, в которых инструмент должен быть вне контакта с поверхностью обрабатываемой детали, например в кадрах смены инструмента при управлении многоинструментальными станками или при отсутствии команды вращения шпинделя и т.п.) приформировываются команды разрешения останова.В процессе работы системы блоки программы обработки последовательно переписываются из внешнего ЗУ 4 в оперативное ЗУ 3, причем каждый последующий блок переписывается извнешнего ЗУ 4 в оперативное ЗУ 3. в процессе отработки (вывода из оперативного ЗУ 3 в устройство 7 станоч 5 ного управления) предыдущего блокапрограммы обработки.Из оперативного ЗУ 3 кадры программы обработки последовательно поступают через блок 10 связи в интер 1 Е полятор б и дешифратор 9 технологических и вспомогательных коианд. Уни"тарный код с выхода 14 интерполятора б и команды с выхода 22 дешифратора 9 поступают на станок 8 для отра 15 ботки. Команды конца отработки каждого кадра с выхода 13 интерполято"ра б поступают в блок 11, где в за- висимости от наличия и частоты унитарного кода на выходе 14, а также20 величины задержки поступления из ЭВМ1 очередного кадра программы обработки формируются запросы различнагоуровня приоритета, поступающие навход ЭВИ 2, Если при достижении мак 25,, симального, наперед заданного уровня приоритета информация из ЭВИ,не поступает, то блок 11 формирова"ния динамического приоритета формирует сигнал о торможения, которыйзо через схему И 18 поступает на входблока 10 связифдля блокировки поступления в устройство 7 станочного управления очередного кадра программы, на вход интерполятора б для тор 35 можения движения по координатам и навход пульта 12 оператора для сигнализации об .аварийном останове.При передаче каждого блока про"граммы из внешнего ЗУ 4 в оперативное ЗУ 3 процессор 2 осуществляетконтроль передаваемой информации,например, по контрольной сумме. Выявление ошибки указывает на недостоверность управляющей информации,содержащейся в блоке программы обработки, переданном из внешнего ЗУ 4в оперативное ЗУ 3. Необходимо предотвратить передачу в устройство 7станочного управления. недостовернойинформации и остановить станок 8 доначала отработки блока, содержащего недостоверную информацию, т.е. в процессе отработки предыдущего блока,для чего при обнаружении ошибки сигнал об этом поступает из процессора2 на вход блока 17 запоминания команд останова и запоминается в немкак команда аварийного останова,которая поступает на один из входов7 1004 элемента И 18. На второй вход элемента И 18 с выхода 22 дешифратора 9 поступают технологические и вспомогательные команды, содержащиеся в выводимых из оперативного 6 У 3 в 3 устройство 7 станочного управления кадра предыдущего блока программы обработки. Элемент И 18 срабатывает только при наличии на первом входе команды аварийного останова, а на 1 О втором входе - команды разрешения останова с выхода 22 дешифратора 9, означающей, что инструмент находит" ся вне контакта с деталью, при этом на выходе 20 элемента И 18 появляет ся сигнал Ь торможения, который проходит через элемент ИЛИ 19 и с выхода 21 в виде сигнала с торможения поступает на входы блока 10 связи, интерполятора 6 и. пульта 12 операто ра. Действие этого .сигнала полнос" тью идентично действию торможения при останове станка вследствие от", сутствияинформации на выходе ЭВИ, однако (в отличие от первого остано ва вследствие отсутствия информации) в 1 ърой останов осуществляется в момент времени, гарантирующий отсутствие контакта инструмента с деталью, что исключает возможность появления зо брака вследствие отжима инструмента. Кроме того, второй останов предотвращает прохождение в устройство 7 станочного управления недостоверной информации, так как останов осуществ ляется в процессе отработки предыдущего блока программы обработки. 976 8Работа станка может быть возобновлена оператором только после устранения причины останова станка.Экономическую эффективность изоб=ретения получают за счет повышениянадежности системы, предотвращениябрака или поломки станка при появлении ошибок в процессе передачиинформации из внешнего ЗУ в оперативное.Формула изобретенияСистема числового программногоуправления группой станков по авт.св. Ю 433 ЦО, о т л и ч а ю щ а яС я тем что, с целью повышениянадежности системы, каждое устройство станочного управления дополнительно содержит последовательно соединенные блок запоминания командостанова, элемент И и элемент ИЛИ,вторым входом подключенный к выходусигналов торможения блока формирования динамического приоритета, а выходом - к входу пульта оператора,второму входу блока связи и третьему входу интерполятора, второй входэлемента И соединен с выходом дешифратора технологических и вспомогательных команд, а вход блока запоминания команд останова подключен квторому выходу электронно-вычислительной машины.Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССРй 433450, кл, 6 05 В 19/18, 1972оставитель И, швецехред О.Неце КорреП Реда кт Кел одписное Заказ 1 93/ 0 ираж 72 ВНИИПИ Государственного комитета СС,по делам изобретений и открытий 11 0 5 Москва .ЖРаушская наб, илиал ППП Патент , г. жгород, ул. Проектная,Рошк
СмотретьЗаявка
3338240, 06.07.1981
ПРЕДПРИЯТИЕ ПЯ Г-4086
ПОТЕХИН ИГОРЬ ПЕТРОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: группой, программного, станков, числового
Опубликовано: 15.03.1983
Код ссылки
<a href="https://patents.su/5-1004976-sistema-chislovogo-programmnogo-upravleniya-gruppojj-stankov.html" target="_blank" rel="follow" title="База патентов СССР">Система числового программного управления группой станков</a>
Устройство для формирования сигнала подключения периферийного устройства к каналу ввода-вывода

Номер патента: 1247881
Опубликовано: 30.07.1986
Авторы: Извозчикова, Карпейчик, Пронин, Яновская
МПК: G06F 13/00
Метки: ввода-вывода, каналу, периферийного, подключения, сигнала, устройства, формирования
...какоеГЗ 5 либо действие в устройстве, получается путем объединения на элементах И 57 одного из сигналов, указанных в таблице на фиг. 4, и одного из сигналовконстанты.Когда периферийное устройство посвоей инициативе хочет связатьсяс устройством оно выдает запрос,выставляя на шину 11 сигнал ТРБ-А.Во время связи по ТРБ-А периферийное устройство может представлятьбайт данных или байт состояния устройства. Когда по текущему ТРБ - А закончен обмен байтом данных, послесброса сигнала РАБ-А возникают условия для выполнения микропрограммы"Загрузки-запоминания УСУ" для запоминания управляющей информации устройства в управляющеч памяти. В этоже время устройство может начать55 обработку следующего выставленного,другим периферийным устройством...
Приемопередающий блок с приоритетом приема

Номер патента: 1438014
Опубликовано: 15.11.1988
Авторы: Алмаев, Барановский, Ващилин, Волков, Смоленская
Метки: блок, приема, приемопередающий, приоритетом
...на втором Входе триггера 6 приоритета установлен сигнал ПриемсастаЯние триггера 6 приоритета не меняется и сигнал "Запрет передячк", отклксчяищий канальный передатчик 3, ке снимается. Наличие сигналов " Передача"с сс сси запрет передачи кя первом и . третьем Входах блаха О запуска геКЕРатаРа ВЫЗЫВаЕт ПОЛВЛЕНкс.- КВ ЕГасВыходе стц с,яля Запуск, ссерессявяе;.,О-;- га;я вход генератора 1, Ня Выходе генератора 11 появляется скгкял Столкновение", который передаетя ня вход "Столкновение станции 2,В режиме "Передача" при Отсутствии сигнала В общей линии 13 связи, т,е., Прк ОтСсстствнн СИГКяля сс 1 ссВКЕМ". Сис. КЯЛ "ПЕрадаЧа" ВЫЗЫВаЕт СПЯбатЫВЯНЧсэ триггера 6 приоритета, ня Выходе котарага появится сигнал "Запрет пере-. дачи передаваемый ка...
Блок выбора диапазона пневматического сигнала

Номер патента: 767777
Опубликовано: 30.09.1980
Авторы: Жуков, Розенцвейг, Ткачук
МПК: G06G 5/00
Метки: блок, выбора, диапазона, пневматического, сигнала
...ю б, то на выходе элемента 3 сравнеЕли сигщл ж 10 не превышает давле тчика 4 то н выходе элемента 1срвинйя будет сф рмирован сигналф 1",после элемента 2 сравнения - "0" и щ,х 50 открывается клапан 21 и закрывается клапанде элемента 3 сравнени - ". С34, С каналом 10 сое не,я - . игнал с элемента 1 Тлиней,только канал 25.аким образом, данное устройство посравнения усиливается реле 26 и после этого поступодклю.чает канал 1 О к одному из каналов 22, 23,- пает одновременно на клапаны 18, 31 и через эле 25юи в зависимости от того, в каком: Мент 27 на клапаны 32 и 19, при этом нормально- ди б55 диапазоне удет находиться пневматическийоткрытый контакт коммутационного клапана 31 сигщл, подводимый к крь я, а нормально-закрытый открыва-...
Устройство для контроля блоков памяти

Номер патента: 717668
Опубликовано: 25.02.1980
Авторы: Лучин, Перелыгин, Праслов, Самсонов
МПК: G01R 29/00
...информации контроля и последующей одновременной передачи ее на контролируемый объект, помещенный в контактныйблок 21,Устройство работает следующим образом.Контроль параметров складывается издвух этапов, первый из которых являетсяподготовительным, когда в узлы и блокиустройства заносится необходимая информацияв соответствии с требуемым алгоритмом кон.троля. На втором этапе происходит переза.пись этой информации в Д-триггеры регистров 17 и 18 и блоков 19 и 20 регистров,передача ее на входы контролируемого объектаи собственно измерение соответствующего па.раметраПо сигналу разрешения от программногоблока 4 на реализацию требуемого алгоритмапроверки на выходах блока 3 блока 1 управления устанавливаются следующие сигналы:сигнал...
Система регулирования блока котел-турбина

Номер патента: 721551
Опубликовано: 15.03.1980
Автор: Шапиро
МПК: F01K 7/24
Метки: блока, котел-турбина
...выполнение заданной программы изменения давления пара. Например, для поддержания номинального и минимально допустимого давления пара в комбинированном режиме работы используют ограничители выходного сигнала задающе го регулятора.В режиме постоянного давления пара при уменьшении сигнала задатчика 3 мощности регулятор 1 уменьшает производительность котла 2, а регулятор 10 форсирует изменение мощности закрыванием регулирующих15 клапанов 11. Через несколько секунд после изменения задания входные сигналы регулятора 10 оказываются сбалансированными при повышенном давлении пара и частичной отработке заданного изменения мощности. 20По мере уменьшения производительности котла 2 давление пара и мощность генератора уменьшаются к заданным...
Предыдущий патент: Устройство для программного управления
Следующий патент: Устройство для управления электроприводом
Случайный патент: Замок трелевочного чокера