Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
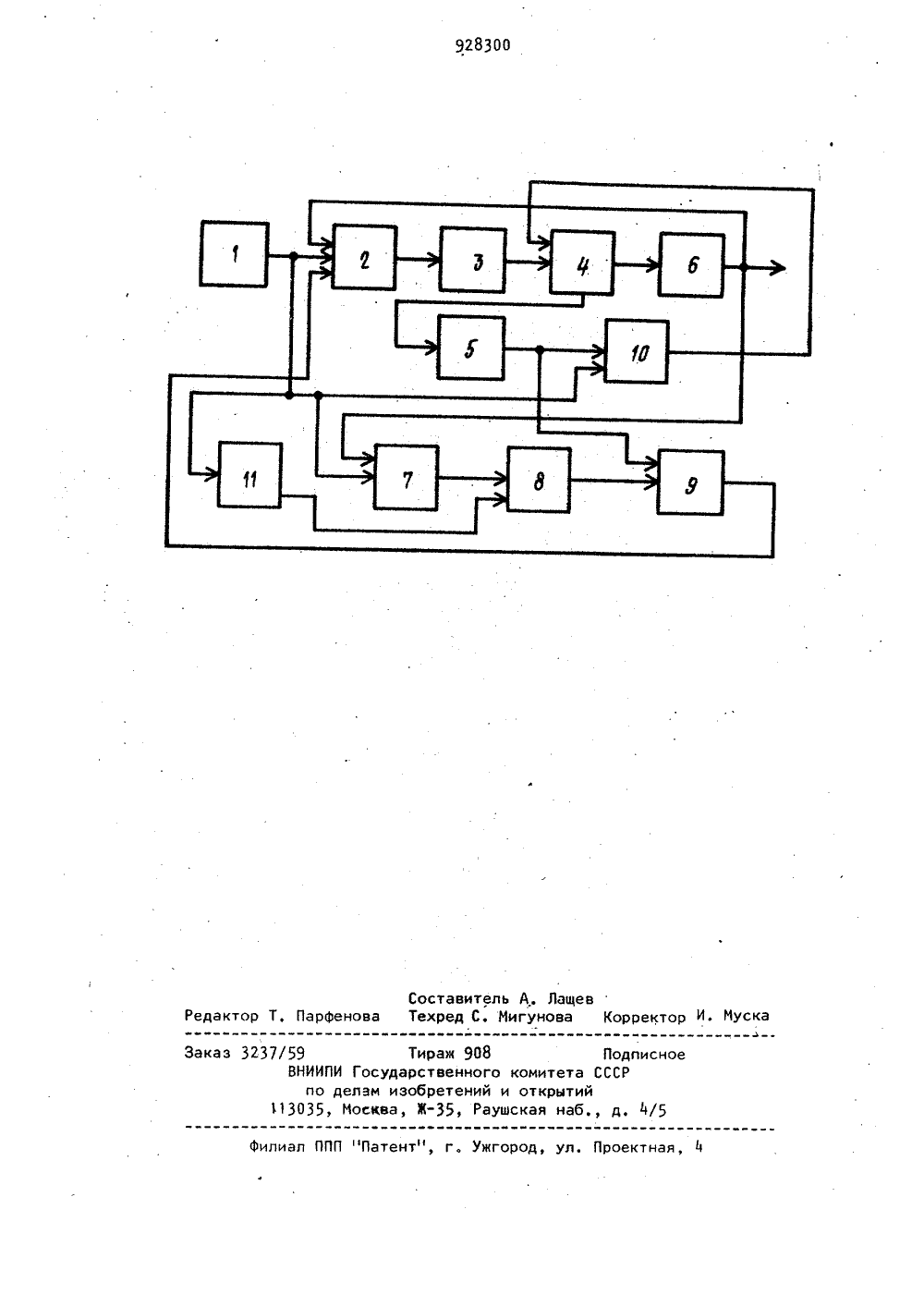
Союз СоветскикСоциапистическикРеспублик ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(23)йриоритетС 05 В 13/02 3 Ьеударственыв квинтет СССРпа двнаи нзабретеннй н втнрытнйДата опубликования описания 15,05,82(72) Авторы изобретени Ю.А,Борцов, С.В.Демидов, Б.Б.Полищи В.В,Путов ляхов гтехнически Ленинградский ордена Ленина эл титут 71) Заявите им. Ульянова (Ленина) и Особо станкостроенио ыриторское бюро ОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕН Изобретение относится к автоматическому управлению и может быть использовано для управления электроприводами с широкими пределами изменения .коэффициента передачи и момента инерции нагрузки, Такие электроприводы применяются, например, в станкостроении - в системах автоматического управления приводами главного движения металлорежущих станков, в роботострое 1 а нии - в системах автоматического управ ления приводами рабочих органов манипуляционных роботов, а также в металлургии - в системах автоматического управления приводами моталок непрерыв15 ных прокатных станков.Известна самонастраивающаяся система управления, содержащая последовательно соединенные блок задающих сигналов, первый сумматор, объект управления, второй сумматор, дифференциатор и усилитель с ограничением, выход которого соединен со вторым входом первого сумматора, а также эталонную модель, вход которой соединен с выходом блока задающих сигналов, а выходсо вторым входом второго сумматора 1,11.Однако включенный в контур управления дифференциатор приводит к усилению помех, а введение дополнительных полюсов дифференциатора для подавления помех снижает устойчивость или, при сохранении степени устойчивости, быстродействие системы в целом.Наиболее близким решением к изобретению является самонастраивающаяся система управления, содержащая последовательно соединенные блок задающих сигналов, регулятор, усилитель мощности, электродвигатель, датчик частоты вращения, идентификатор состояния, блок масштабных коэффициентов и нелинейный усилитель с ограничением, выход которого соединен со вторым входом регулятора, третий вход ре" гулятора связан со вторым выходом дат." чика частоты вращения, второй выход электродвигателя через датчик тока392830возбуждения связан с блоком регулирова"ния тока возбуждения, выход которого связан со вторым входом электродвигателя,выход блока задающих сигналов соединенсо вторым входом идентификатора состояния,со вторым входомблока регулирова.-.ния тока возбуждения и через эталоннуюмодель - со вторым входомблока мас.штабных коэффициентов 2.Недостатком известного устройстваявляется низкое быстродействие пришироком регулировании частоты вращения электродвигателя.,Цель изобретения - повышение быстродействия самонастраивающейся системы управления двухзонным электроприводом постоянного тока при широкомрегулировании частоты вращения вовторой зоне изменением потока возбуждения, а также при широком изменении момента инерции нагрузки.Поставленная цель достигается тем,что в самонастраивающейся системевторой выход датчика тока возбуждениясоединен со вторым входом нелинейногоусилителя, выполненного с регулируемым ограничителем.На чертеже представлена блок-схемарегулятора.Регулятор содержит блок 1 задающих сигналов, регулятор 2, усилительмощности 3, электродвигатель 1 с датчиком 5 тока возбуждения и датчиком6 частоты вращения, идентификатор состояния 7, блок 8 масштабных коэффициентов, нелинейный усилитель 9 с регуИлируемым ограничением, блок 10 регулирования тока возбуждения и эталоннаямодель 11,Самонастраивающаяся система управ 40пения двухзонным электроприводом постоянного тока работает. следующим образом.Блок задающих сигналов 1 вырабатывает командный сигнал, который черезрегулятор 2 и усилитель мощности 3подается на якорь электродвигателяС помощью датчика частоты вращения6 сигнал отрицательной обратной связиподается.на второй вход регулятора 2.Кроме того, выход блока задающих сигна- ффлов 1 поступает на вход блока регулирования возбуждения 1 О, выход которого соединен с обмоткой возбужденияэлектродвигателя. Блок 10 поддерживает номинальное значение тока (потока) ззвозбуждения в первой зоне регулирования до достижения задающим сигналомуровня, соответствующего началу регу 0 4пирования э.зктропривода во второй зоне, где ток (поток) возбуждения уменьшается, чем достигается дальней" шее увеличение частоты вращения электропривода. Датчик тока возбуждения 5 выход которого подключен ко второму входу блока 10, обеспечивает отрицательную обратную связь по току возбуждения. Одновременно дпя обеспечения быстродействующей и устойчивой отработки электроприводом задающих сигналов эталонная модель 11, подключенная к выходу блока 1, формирует и-мерный вектор состояния электропривода, соответствующий желаемой динамике с предельно возможным по энергетическим ресурсам быстродействием, а идентиФикатор 7 на основе информации о задающем сигнале и сигнале датчика частоты вращения 6 вырабатывает и-мерный вектор действительного состояния электропривода. Затем выходы эталонной модели 11 и идентификатора 7 сравниваются покомпонентно в блоке масштабных коэффициентов 8, выходной сигнал которого представляет собой линейную комбинацию покомпонентных разностей с весовыми коэффициентами, выбираемыми из условия устойчивости. Этот сигнал поступает на вход нелинейного усилителя 9 с регулируемым ограничением уровня выходного сигнала, являющегося сигналом самонастройки, подаваемого на третий вход регулятора 2 для принудительного согласования реальной динамики электропривода с эталонной динамикой., предписываемой моделью.По второму входу нелинейного усилителя 9, подключенному к выходу датчика тока возбуждения 5, производится регулирование уровня ограничения выходного сигйала усилителя 9 обратно пропорционально изменению тока возбуждения, что является существенным для обеспечения работоспособности электропривода в целом. При работе электропривода в первой зоне регулирования частоты вращения, когда ток возбуждения имеет максимальное значение, создавая номинальный поток возбуждения, ограничение согнала самонастройки с выхода усилителя 9 имеет постоянный минимальный уровень. При этом при изменении момента инерции или действии иных факторов, приводящих к ухудшению динамики электропривода на выходе блока 8 появляются сигналы рассогласования, формируемые5 9283 усилителем 9 в сигнал самонастройки, минимальный постоянный чоовень которого выбиоается настоойкой блока 9 таким образом, чтобы обеспечить поинудительное согласование реальной 5 ,динамики с эталонной при ее ухудшении не менее чем в 5-10 раз, что соответствует, например, изменению момента инерции в 5-10 раз.При регулировании частоты враще О ния электропривода во второй зоне уменьшением потока возбуждения, которое в современных электроприводах постоянного тока достигает восьми- десятикратного, электромеханическая 15 постоянная времени увеличивается в ЦРраз, где Кф - коэффициент ослабления потока по сравнению с номинальным ф ном20Ф фсфиль Таким образом, в глубоко регулируемом по возбуждению электроприводе электромеханическая постоянная 25 времени увеличивается в верхней части диапазона до 50-100 раэ, что приводит к соответствующему ухудшению динамики, которое уже не может быть скомпенсировано сигналом самонастрой- зв ки при минимальном уровне ограничения. Поэтому в предлагаемом устройстве уровень выходного сигнала усилителя 9 автоматически возрастает с уменьшением тока (потока) возбуждения, что обеспечивает работоспособность электропривода при регулировании частоты вращения во второй зоне, При этом, если исключить связь выхода датчика тока возбуждения со 4 о вторым регулирующим входом нелинейного усилителя 9 и настроить уровень сигнала выхода блока 9 на постоянное максимальное значение, обеспечивающее самонастройку динамики при максимальном ослаблении потока возбуждения, тогда при возрастании потока возбуждения такой уровень сигнала самонастройки окажется чрезмерным и приведет к нарушению работоспособ 50 ности электропривода, особенно при работе его в первой зоне регулирования и стабилизации частоты вращения с максимальным потоком возбуждения. 00 бТаким образом, вновь введенная связь между выходом датчика и вторым входом нелинейного усилителя с регулируемым ограничением обеспечивает повышение быстродействия двухзонного электропривода, что приводит к расширению области его применения в условиях глубокого регулирования потока возбуждения и широкого изменения момента инерции, а также при действии других дестабилизирующих динамику электропривода факторов.Формула изобретенияСамонастраивающаяся система управления, содержащая последовательносоединенные блок задающих сигналов,регулятор, усилитель мощности, электродвигатель, датчик частоты вращения,идентификатор состояния, блок масштабных коэффициентов и нелинейный усилитель с ограничением, выход которого соединен со вторым входом регулятора, третий вход регулятора связансо вторым выходом датчика частотывращения, второй выход электродвигателя через датчик тока возбуждениясвязан с блоком регулирования токавозбуждения, выход которого связан.со вторым входом электродвигателя,выход блока задающих сигйалов соеди"нен со вторым входом идентификаторасостояния, со вторым входом блокарегулирования тока возбуждения и через эталонную модель - со вторымвходом блока масштабных коэффициентов,о т л и ч а ю щ а я с я тем, цто, сцелью повышения быстродействия самонастраивающейся системы, второй выходдатчика тока возбуждения соединен со.вторым входом нелинейного усилителя,выполненного с регулируемым ограничением,Источники информации,принятые во внимание при экспертизе1. Громыко В.Д, и др, Самонастраи" вающиеся системы с моделью. И., "Энергия", 1974, с, 21,2. Фишбейн В,Г. Расчет систем подчиненного регулирования вентильного электропривода постоянного тока. И "Энергия", 1972, с, 77 (прототип).928300 Составитель А. Лащ Техред С, Мигунова рек ПарФенова едакто Заказ 3237/59ВНИ илиал ППП "Патент", г. Ужгород, ул. Проектна Тираж 908 ИПИ Государственног о делам изобретений 5, Москва, 1-35, Ра
СмотретьЗаявка
2920807, 05.05.1980
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. УЛЬЯНОВА, ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО СТАНКОСТРОЕНИЯ
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ДЕМИДОВ СЕРГЕЙ ВЛАДИМИРОВИЧ, ПОЛИЩУК БОРИС БЕНЦИАНОВИЧ, ПОЛЯХОВ НИКОЛАЙ ДМИТРИЕВИЧ, ПУТОВ ВИКТОР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 15.05.1982
Код ссылки
<a href="https://patents.su/4-928300-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Реверсивный электропривод с двухзонным регулированием частоты вращения

Номер патента: 780135
Опубликовано: 15.11.1980
Авторы: Алексеев, Беседин, Иванов
МПК: H02P 5/06
Метки: вращения, двухзонным, реверсивный, регулированием, частоты, электропривод
...блока переключения обратной связи по ЭДС, вход которого подключен к выходу нереверсивного преобразователя, в выход - ко входу реверсивного преобразователя, питающего обмотку возбуждения электродвигателя, блок регулирования возбуждения с подключенными к нему блоком 1 логики и датчиком состояния вентилей, и второй нуль-орган, введены авв нелинейных звена с характеристиками типа "зона нечувствительности" и насыщение, входы которых подключены к датчику частоты вращения, а выходы - к двум входам35 8 7 780 1йуль-органа 16 изменяется полярностьи преобразователь 14 блоком 21 логикипереключается на противоположное направление работы - происходит реверстока возбуждения в обмотке 13, ЭДСдвигателя 12 изменяет знак и осуществляет электрическое...
Электропривод постоянного тока с двухзонным регулированием частоты вращения

Номер патента: 1385216
Опубликовано: 30.03.1988
Авторы: Гарнов, Гольдрин, Дубинский, Куликов, Левин, Рабинович
МПК: H02P 5/06
Метки: вращения, двухзонным, постоянного, регулированием, частоты, электропривод
...номинальному напряжению якоря, а при нагрузке снижается узлом 13 ограничения напряжения на величину, равную падению напряженИя в якорной цепи электродвигателя. Сигнал на выходе формирователя 9 закона изменения потока начинает уменьшаться и двигатель продолжает разгон за счет ослабления поля. Тор 35 40 можение двигателя происходит в обрат" якоря вплоть до полной остановки привода. При приложении статической нагрузки к заданию динамического токадобавляется задание статической составляющей тока якоря, Суммарный сигнал задания воздействует через узел6 ограничения задания тока якоря на 55 ном порядке, сначала (во второй зоне)усиливается поле при неизменной ЭДС,а затем после выхода узла 4 ограничения задания ЗДС из насыщения, начинает...
Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения

Номер патента: 1394383
Опубликовано: 07.05.1988
Авторы: Абрамов, Алиев, Барьюдин, Гусейнов, Парфенов, Чердаков
МПК: H02P 5/06
Метки: вращения, двухзонным, постоянного, реверсивный, регулированием, частоты, электропривод
...2 запирается; а ток якоря спадает до нуля, Так как на выходе релейного элемента 35 с петлей гистерезиса появляется напряжение положительной полярности 25(Фиг.8), то сигнал логической "1" 0 появляется на первом выходе 21 знакочувствительного релейного элемента 36 (фиг.2), на втором выходе 38 сигналлогического "0" 0 (фиг.8), 30 что при наличии сигнала логической "1" на выходе логического элемента 41 приводит к появлению сигнала логической "1" на выходе логического элемента 39 и сигнала логического "0" на выходе логического элемента 40. При этом управляемый ключ 31 размыкается, а ключ 30 замыкается, На-. пряжение с выхода регулятора 13 ЭДС .поступает непосредственно на задающий вход регулятора 12 тока возбуждения, задавая ток...
Способ регулирования частоты вращения электропривода с дифференциальным редуктором

Номер патента: 1443115
Опубликовано: 07.12.1988
Авторы: Бочаров, Грачев, Кондаков, Резников, Смирнов, Токарь
МПК: H02P 7/753
Метки: вращения, дифференциальным, редуктором, частоты, электропривода
...времени й- й ). В данном диапазоне работы частота вращения второго входного вала 6 остается постоянной и равной и , а первыйЭ мсксвходной вал 4 в койце рассматривае" мого диапазона работы (время) приобретает частоту вращения, равную 1/2 п ,. Далее размыкается контактор 13 и тем самым снимается вращающий момент с второго входного вала 6.Статический преобразователь 11 частоты с помощью первой электрической машины 5 раскручивает второй входной вал 6 до частоты вращения 2 п и после синхронизации выход 5 максного напряжения второй электрической машины 8 с напряжением трехфазного источника 14 переменного напряжения замыкается ключ 15, Так как вторая1154ленную мощность регулируемого приводного устройства, имеющего всегда худшие массогабаритные...
Устройство для регулирования частоты вращения электропривода постоянного тока

Номер патента: 731538
Опубликовано: 30.04.1980
Автор: Ткаченко
МПК: H02P 5/06
Метки: вращения, постоянного, частоты, электропривода
...поступающим с выхода интегрирующего звена 13, с учетом скорости его изменения, определяемой выходным сигналом инерционного звена 15 и поступающей на вход блока 11 через нелинейный элемент 14.В случае малых значений получающегося в результате такого сравнения выходного сигнала блока 11, лежащих в пределах зоны нечувствительности нелинейного звена 10, на второй вход операционного усилителя 9 сигнал не поступает, и устройство работает как обы гная система подчиненного регулирования частоты вращения и тока якоря двигателя, что обеспечивается выбором коэффициента усиления операционного усилителя 11 по первому входу, подключенному к выходу регулятора 7, равного единице, и выбором ограничения выходного напряжения этого усилителя,...
Предыдущий патент: Регулятор с переменной структурой
Следующий патент: Регулирующее устройство
Случайный патент: Устройство для трелевки деревьев