Адаптивная система для идентификации объекта управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
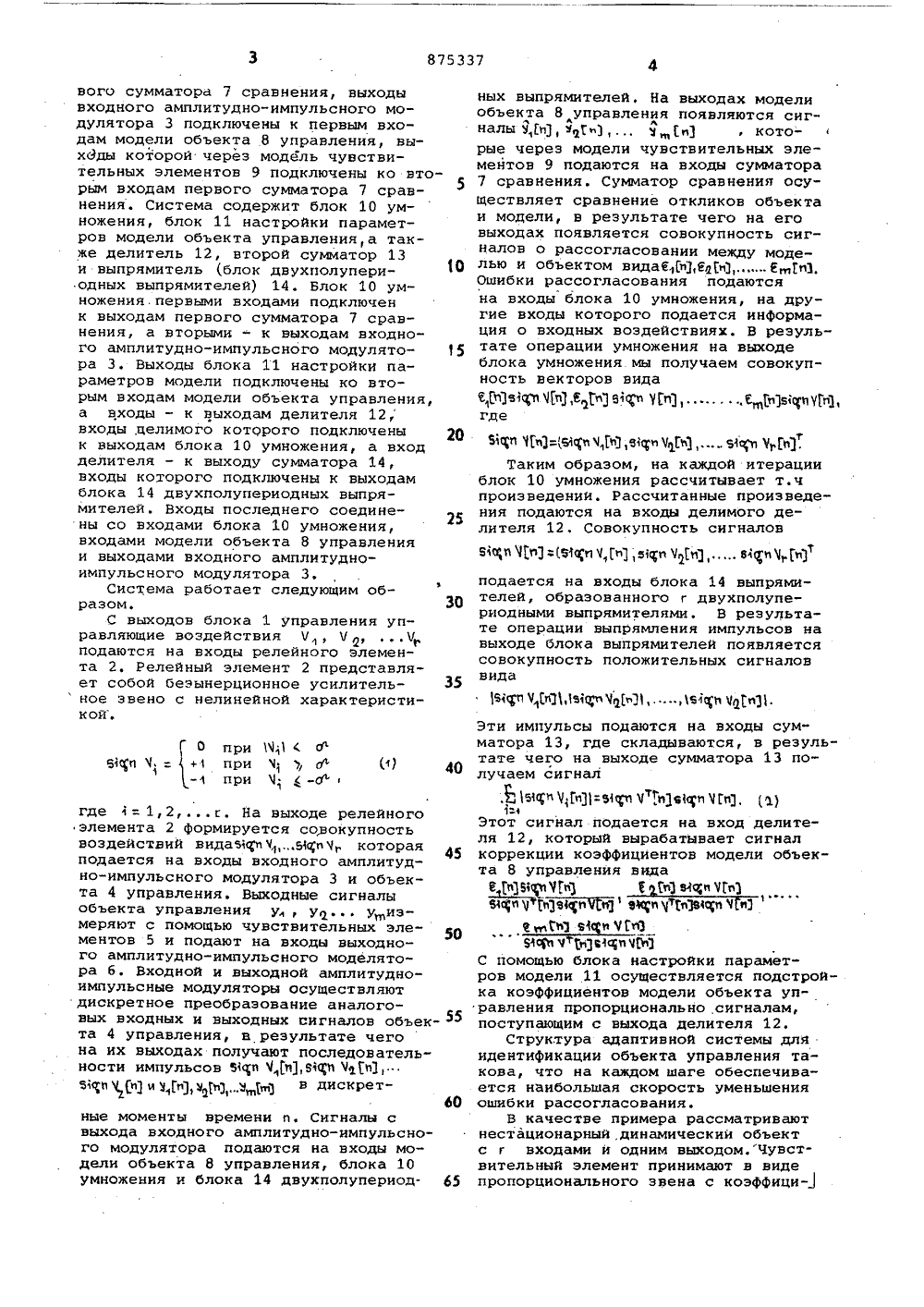
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советских Соцкалнстическкх Республнки 875337 АВТОРСКОМУ СВ ЛЬСТВ ьмое к авт. свид-ву602 ЯО (21)2888202/28-2 61) Дополните 22) Заявлено 2 с присоединени 23) Приоритет 51)М. Кл.з 6 05 В 17/00 эаявкм Но осударственныЯ комнте СССР но девам нзобретениЯ н открытнЯ(088.8) публиков ата опубл лРуденко,1 Зайцев, Г. А. Трутнев, А.А. Бобух, С. Е.В.Бодянский и З.Г.Камалиев(71 Заявите 54) АДАПТИВНАЯ СИСТЕИА ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТУПРАВЛЕНИЯ Изобретение относится к автомати-. ке и может найти широкое применение в системах автоматического управления различными объектами с переменными параметрами.Наиболее близкой по технической сущности к предлагаемой является система, содержащая последовательно соединенные блок управления, репейный элемент, объект управления, чувст-вительные элементы, первый амплитудно-импульсный модулятор, сумматор и блок умножения и последовательно соединенные второй амплитудно-импульсный модулятор, модель объекта управле ния и модель чувствительных элементов, выходы которой соединены с соответствующими вторыми входами сумматора, вторые входы модели объекта управ ленин соединены с соответствующими 20 выходами блока настройки, а выходы релейного элемента соединены с соответствующими входами второго амплитудно- импульсного модулятора, выходы которого соединены с соответствующими вторыми входами блока умножения 1.ГНедостатком известного адаптивного устройства для идентификации объекта управления является невысокое быстродействие. 30 Цель изобретения - повыаение быстродействия системы за счет ускорения процесса идентификации.Эта цель достигается тем, что адаптивная система для идентификации объекта управления содержит последовательно соединенные выпрямитель, второй сумматор и делитель, выходы которого соединены с соответ ствующими входами блока настройки,вторые входы- с соответствующими выходами блока умножения, а вторые входы блока умножения соединены с соот- . ветствующими входами выпрямИтеля.На чертеже изображена блок-схема предлагаемой системы для идентификации объекта управления для варианта нестационарного объекта с числом управляющих воздеиствий, равном г и с е измеряемыми выходными координатами.Предлагаемая система содержит. блок 1 управления, к которому подключены через релейный элемент 2 входы входного второго амплитудно-импульсного модулятора 3 и объекта 4 управления к выходам которого через чувствительные элементы 5 и выходной первый амплитудно-импульсный. модулятор 6 подключены первые входы пер875337 Юсп Ч,: 45 ные моменты выхода входи го модулятордели объектаумножения и времени и. Сиго амплитудно а подаются на 8 управления, лона 14 двухп налы с импульсно входы моблока 10лупериодвого сумматора 7 сравнения, выходы входного амплитудно-импульсного модулятора 3 подключены к первым входам модели объекта 8 управления, выходы которои через модель чувствительных элементов 9 подключены ко вторым входам первого сумматора 7 сравнения. Система содержит блок 10 умножения, блок 11 настройки параметров модели объекта управления,а также делитель 12, второй сумматор 13 и выпрямитель (блок двухполупери одных выпрямителей) 14. Блок 10 умножения.первыми входами подключен к выходам первого сумматора 7 сравнения, а вторыми - к выходам входного амплитудно-импульсного модулято ра 3. Выходы блока 11 настройки параметров модели подключены ко вторым входам модели объекта управления, а входы - к выходам делителя 12, входы,целимого котсрого подключены к выходам блока 10 умножения, а вход делителя - к выходу сумматора 14, входы которого подключены к выходам блока 14 двухполупериодных выпрямителей, Входы последнего соединены со входами блока 10 умножения, входами модели объекта 8 управления и выходами входного амплитудно- импульсного модулятора 3.Система работает следующим образом.ЗОС выходов блока 1 управления управляющие воздействия М, Ч , , Ч подаются на входы релейного элемента 2, Релейный элемент 2 представляет собой безынерционное усилительное звено с нелинейной характеристикой. б при Щ ( Ф+ 1 при Ч ад (1при Ч с-Фгде 1: 1,2,с. На выходе релейного элемента 2 Формируется совокупность воздействий видаЩпМ,УоЧ которая подается на входы входного амплитудно-импульсного модулятора 3 и объекта 4 управления. Выходные сигналы объекта управления уу. уизмеряют с помощью чувствительных элементов 5 и подают на входы выходного амплитудно-импульсного моделятора 6. Входной и выходной амплитудно- импульсные модуляторы осуществляют дискретное преобразование аналоговых входных и выходных сигналов объек та 4 управления, в результате чего на их выходах получают последовательности импульсов 510 Ч 111,ВЩ 11 ЧЫ" Ъср 1 Чад и у 1 тз, удод .ув дискрет ных выпрямителей. На выходах модели объекта 8 управления появляются сигО л лналы у,ь, уС), у н 3, которые через модели чувствительных элементов 9 подаются на входы сумматора 7 сравнения. Сумматор сравнения осуществляет сравнение откликов объекта и модели, в результате чего на его выходах появляется совокупность сигналов о рассогласовании между моделью и объектом видабК,ЯаЯ,ЕГсЗ. Ошибки рассогласования подаются на входы блока 10 умножения, на другие входы которого подается информация о входных воздействиях. В результате операции умножения на выходе блока умножения мы получаем совокупность векторов видаЕ СпЗзЬр Щ,ЕР 1 в 1 р ЧГп, Л сзсруГт 1, где 5 ср МЯ,Еср чс 3,е 1 срз Ч 1 Г 11 э 1 н ЧЯ,Таким образом, на каждой итерации блок 10 умножения рассчитывает т.ч произведениИ. Рассчитанные произведения подаются на входы делимого делителя 12. Совокупность сигналов 81 с 11 Чп = (мсдп чГ 6 , 51 срч чГи 1, . 64 Ян ЧГ" подается на входы блока 14 выпрямителей, образованного г двухполупериодными выпрямителями. В результате операции выпрямления импульсов навыходе блока выпрямителей появляетсясовокупность положительных сигналоввида 1%Ср 1 ЧЮ, 1 з 1 р ЧС 3, . ,1 в 1 ср Чп 1. Эти импульсы подаются на входы сумматора 13, где складываются, в результате чего на выходе сумматора 13 получаем сигнал , 9 сн Ч;Щ=Мср 1 Ч Ъ 1 еЬ ЧЕЙ. 1) 1"- Этот сигнал подается на вход делитеЛя 12, который вырабатывает сигнал коррекции коэффициентов модели объекта 8 управления вида 6 еУфМГ 6 % ОЯ Мн ЧГе 3 Впйспщня еФъцвч н 3ЕтЬ 1 М н УСТОУ 1 М ЯВ 1 ОЧИ 1 С помощью блока настройки параметров модели 11 осуществляется подстрой ка коэффициентов модели объекта управления пропорционально сигналам, поступающим с выхода делителя 12,Структура адаптивной системы для идентификации объекта управления такова, что на каждом шаге обеспечивается наибольшая скорость уменьшения ошибки рассогласования.В качестве примера рассматривают нестационарный,динамическии объект с г входами и одним выходом.Чувствительный элемент принимают в виде пропорционального звена с коэффициентом передачи, равным 1. Широкийкласс динамических объектов можетбыть описан дискретным уравнениемвида гдето- неизвестные коэффициенты+объекта управления, подлежащие определению.Уравнение модели объекта управления может быть задано в виде гдето,- 4- оценки параметров объектауправления, вычисленные на ( -1) -м шаге идентификации. З=ЕсЫ), (5) изменения коэффициентов модели объекта управления в виде .сЩгб и-1 ЩуОД- ,дпДЧ;Щ 51 срзМ 1 (6)ге 3=73 с. Ч;1: А Чп 1(Ъ)Выбор коэффициента пропорциональнос 1 а 1 ти И 3 и типа входного воздеиствия Чь определяют скорость схрдимости процесса идентификации. Нетрудно,видеть, что предлагаемая адаптивнаясистема для идентификации объекта уп 1 О равления реализует алгоритм настройки коэффициентов модели объекта.управления видаЪн-.С 34,т)ЧЕЗ:, )Чп 1 (4)Мор ЧЯзЯ Я 1являющийся модификацией алгоритма(6).Если для характеристики скорости сходимости процесса идентификации, реализуемого предлагаемой адаптивноисистемой, использовать монотоннуюфункцию, не сложно получить, чтоМеру качества индентификации мож- сходимость процесса индентификациино охарактеризовать критерием близос- характеризуется величинойти координат модели объекта управления и объекта управления (Я Ео-Я 61 су ЧЕо 1)(з 4(Дд Ч ГаейрЧИ)т. е.обеспечивается монотонное убываниеошибки определения параметров объпредставляющим собой сумму модулейекта.ошибок рассогласования выходных координат модели объекта управления иДля сравнения процессов идентиобъекта управления. Достоинствомкритерия (5)является его некритичность фк виду функции распределения помех.ределим величинуПри минимизации по методу градиента 03= Гь 3-Г"1 И)критериями=е:%01получают законы 35 Эта величина составляет1ПЧ и- з 4 МЩ ЧЯЫср УЩ-(Ч иЧп 351 Ф 1 Ч 0 Ж 4 ПЧЫБй 4(Ф(з 4 чЪ 1 зЩп чтО)(ч 1;ср чЖт.е. скорость процесс идентифика- осуществляться одновременно с процесции, реализуемого предлагаемой сис сом управления, Некритичность к закотемой, всегда выше скорости процесса ну распределения помех, высокая помеидентификации, реализуемого известной, хоустойчивость и повышенное быстроТаким образом, предлагаемая адап- действие расширяют функциональныетивная система для идентификации объ. возможности предлагаемой системы иекта управления обеспечивает повыше 45 позволяют ее испольэовать при упрапние скорости процесса идентифика" ленни быстропротекающими стохастиции, т.е. повышается быстродействие ческими технологическими процессасистемы в целом. ми. Применение предлагаемой системыДостоинством предлагаемой системы позволяет оперативно получать достодля идентиФикации объекта управления 50 верную информацию об объекте управявляется простота технической реали- ления, что ведет к повышению качестзации, т.е, ее можно реализовать ва процесса управления объектом, ав виде набора аналогичных блоков, Вы- это, в свою очередь, обеспечиваетполненнйх на современных унифициро- появление положительного экономичес.ванных цифровых элементах, Система кого эффекта.может найти широкое применение в сис 55 Использование предлагаемой адаптивтемах управления технологическими ной системы только в производствепроцессами с идентификатором в конту- кальцинированиой соды позволяет заре управления. Особенно эффективно счет уменьшения расхода очищенногоиспользование предлагаемого устрой- рассола, расхода извести, расходаства в системахоптимального управ пара и ряда других реагентов снизитьления, когда управляющие воздействия себестоимостЬ кальцинированной соносят релейный характерв этом слу- ды,чае нет необходимости в разделении Формула изобретенияво времени процессов управления и Адаптивная система для идентифиидентификации, идентификация будет б 5 кации объекта управления содержа.ВНИИПИ Госу по делам 113035, МосТираж 943 Подпирственного комитета СССРзобретений и открытийа,Ж, Раушская наб., д,каз о илиал ППП "Патент", г. Ужгород, ул. Проектна щая последовательно соединенные блок,управления, релейный элемент, объектуправления, чувствительные элементы, первый амплитудно-импульсныймЬдулятор, сумматор и блок умножения, и последовательно соединенныевторой амплитудно-импульсный модулятор, модель объекта управления имодель чувствительных элементов, выходы которой соединены с соответствующими вторыми входами сумматора, вторые входы моцели объекта управлениясоединены с соответствующими выходами блока настройки, а выходы релейного элемента соединены с соответствующими входами второго амплитудно-импульсного модулятора, выходыкоторого соединены с соответствующими вторыми входами блока умножения,о .тл и ч а ю щ а я с я тем,что, с цельюповышения быстродействия системы,она содержит последовательно соединенные выпрямитель, второй сумматори делитель, выходы которого соединены с соответствующими входами блока настройки, вторые входы - с соответствующими выходами блока умножения, а вторые входы блока умножениясоединены с соответствующими входамивыпрямителя. Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРпо заявке Р 2646862/24,кл, С 05 В 17/00,1979 (прототип) .
СмотретьЗаявка
2888202, 26.02.1980
ПРЕДПРИЯТИЕ ПЯ А-3732
ЗАЙЦЕВ ИВАН ДМИТРИЕВИЧ, ТРУТНЕВ ГЕННАДИЙ АЛЕКСЕЕВИЧ, БОБУХ АНАТОЛИЙ АЛЕКСЕЕВИЧ, РУДЕНКО ОЛЕГ ГРИГОРЬЕВИЧ, БОДЯНСКИЙ ЕВГЕНИЙ ВЛАДИМИРОВИЧ, КАМАЛИЕВ ЗУФАР ГИМАЛЕТДИНОВИЧ
МПК / Метки
МПК: G05B 17/00
Метки: адаптивная, идентификации, объекта
Опубликовано: 23.10.1981
Код ссылки
<a href="https://patents.su/4-875337-adaptivnaya-sistema-dlya-identifikacii-obekta-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Адаптивная система для идентификации объекта управления</a>
Блок приращений параметров самонастраивающейся модели линии электропередач

Номер патента: 1427466
Опубликовано: 30.09.1988
Авторы: Антонов, Ванин, Нудельман
МПК: H02H 3/40
Метки: блок, линии, модели, параметров, приращений, самонастраивающейся, электропередач
...сумматора 60, выход которого соединен со свободным входом вычитателя 53, дру" гой вход первого дополнительного сумматора 60 и один иэ свободных входов ЗО сумматора 52 промежуточными входами 61 и 62 соединены с аналогичными вы. ходами 35 и 39 соответствующего звена модели 1 длинной ЛЭП. Третий вход сумматора 52 через дополнительный ум- З ножитель 63 подключен к выходу второго дополнительного сумматора 64, входы которого соединены с первым входом вычитателя 53 посредством первого усилителя 65 и каскадно соединенных дифференциатора 66 и второго усилителя 67. Свободные входы умножителей 59 и 63 объединены между собой, образуя третий промежуточный вход 68 звена. Вход 55 схемы формирования первого звена 49 подключен к выходу дополнительного...
Система автоматического управления

Номер патента: 1168897
Опубликовано: 23.07.1985
МПК: G05B 13/02
...легко решается, если известны функции го(1) и )г (1). Для их нахождения проинтегрируем выражение (5) в пределах одного интервала управления 1 Е О, Тб (1) - б (0) =1(го(т) +гг 1(т) Щт) ) дт. (6)Параметризуем функции /со (1) и К(1)оРУо(1) = Е У,1, Ягг(1) = Е ъ;1 (7)и для простоты принимаем з = р=1 и /5,"= а РГ =аРою = а а, у, =а. Перепишем выражение (6) в видеЬб (1) =(а,+ аг+ а,ц (Т ) +О=ЛО (1) - 1,(аз+ат)1(т) дт (9) и рассматриваем функционал вида11(1) =5,7 (т) дт. (10)Используя йеобходимые условия минимума функционала (0), получаем выражениядбц(У)дУд = 1,(Ъ+ + сг у) и )Ку , и(у)сИсИ1 а(а 1 Га ) У. - 1хааа +ау)ц( у)д ),Рц( )ддС, (11)Решив систему (11) для любого 1 е (О,Т получаем значения аз(1) и а(1), которые позволяют определять...
Состав для обсыпки блоков моделей с керамическим покрытием

Номер патента: 1196095
Опубликовано: 07.12.1985
Авторы: Бушуев, Бушуева, Тимофеев
МПК: B22C 1/00
Метки: блоков, керамическим, моделей, обсыпки, покрытием, состав
...окисляет остатки модельного состава, находящегося в порах формы. При этом температуру обжига снижают до 560 С, а время обжигаопри этой температуре сокращают до 1,5 ч.При заливке форм жидким металлом в разогревшейся форме при температуре свыше 700 С происходит соединение пероксида бария с кислородом окружающей среды. Происходящая реакция способствует уменьшению в отливках толщины обезуглероженного слоя. Температуру обжига 560 С вы-Таблица 1 Ингре- диенты Содержание ингредиентов, мас, , в составе 1 12 3 Кварце 35песок 85 87 90 Пероксидбария 15 13 10 96095 2бирают в связи с тем, что при более .высокой температуре (570 С) в кварцевых материалах происходят объемно-фазовые превращения, в результатекоторых в форме возникают...
Во союзная-: . l; jbi. ) ii. ki-eoiiliбиблиотекав. и. жук

Номер патента: 318940
Опубликовано: 01.01.1971
МПК: G06F 7/38
Метки: ki-eoiiliбиблиотекав, жук, союзная
...с выходами старших разрядов регистра аргумента, а выходы - со входами узла умножения. 10Это позволяет за счет установки нового узла постоянной памяти разностей с меньшей разрядностью исключить из состава устройства один из узлов постоянной памяти опорных значений обратной величины У 2, имею щих большую разрядность, и узел вычитания, служащий для вычисления разности У, - У 2 соседних опорных значений, благодаря чему достигается повышение быстродействия и экономия оборудования. 20На фиг. 1 показан график кусочно-линей 1ной аппроксимации функции У = - на нехкотором ее участке; на фиг. 2 - блок-схема предлагаемого устройства. 25На графике показаны следующие величины, используемые при кусочно-линейной аппроксимации:х и х 2 - соседние...
Система для контроля и диагностики цифровых узлов

Номер патента: 911531
Опубликовано: 07.03.1982
Авторы: Войханский, Голованевский, Кузьмин, Манойлов, Немолочнов, Фомич, Шульман
МПК: G06F 11/16
Метки: диагностики, узлов, цифровых
...сравнения производит сравнение сигналов,поступающих с выхода зонда, с ожидаемыми сигналами в соответствующихвнутренних точках цифрового узла,хранящимися во втором регистре 6.Блок 12 анализа ( Фиг. 3) предназначен для преобразования анапогового сигнала с выхода зонда в цифровой, код и сравнения его с кодом цифровоймодели неисправностей, хранящихсяИв блоке памяти моделей неисправностей. Блок 12 анализа состоит иэ аналого-цифрового преобразователя 15 иузла 16 сравнения цифровых кодов. 6Блок 13 памяти моделей неисправностей ( фиг, 4) хранит в цифровой форме модели неисправностей цифрового узла. Калдому виду хранимых моделей неисправностей соответствует два 2-разрядных кода; код верхней границы и код нижней границы проявления...
Предыдущий патент: Устройство для цифрового управления асинхронным двигателем
Следующий патент: Устройство для поддержания постоянной скорости резания
Случайный патент: Волновой пневмодвигатель