Система управления правильнымагрегатом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 804070
Автор: Манило
Текст
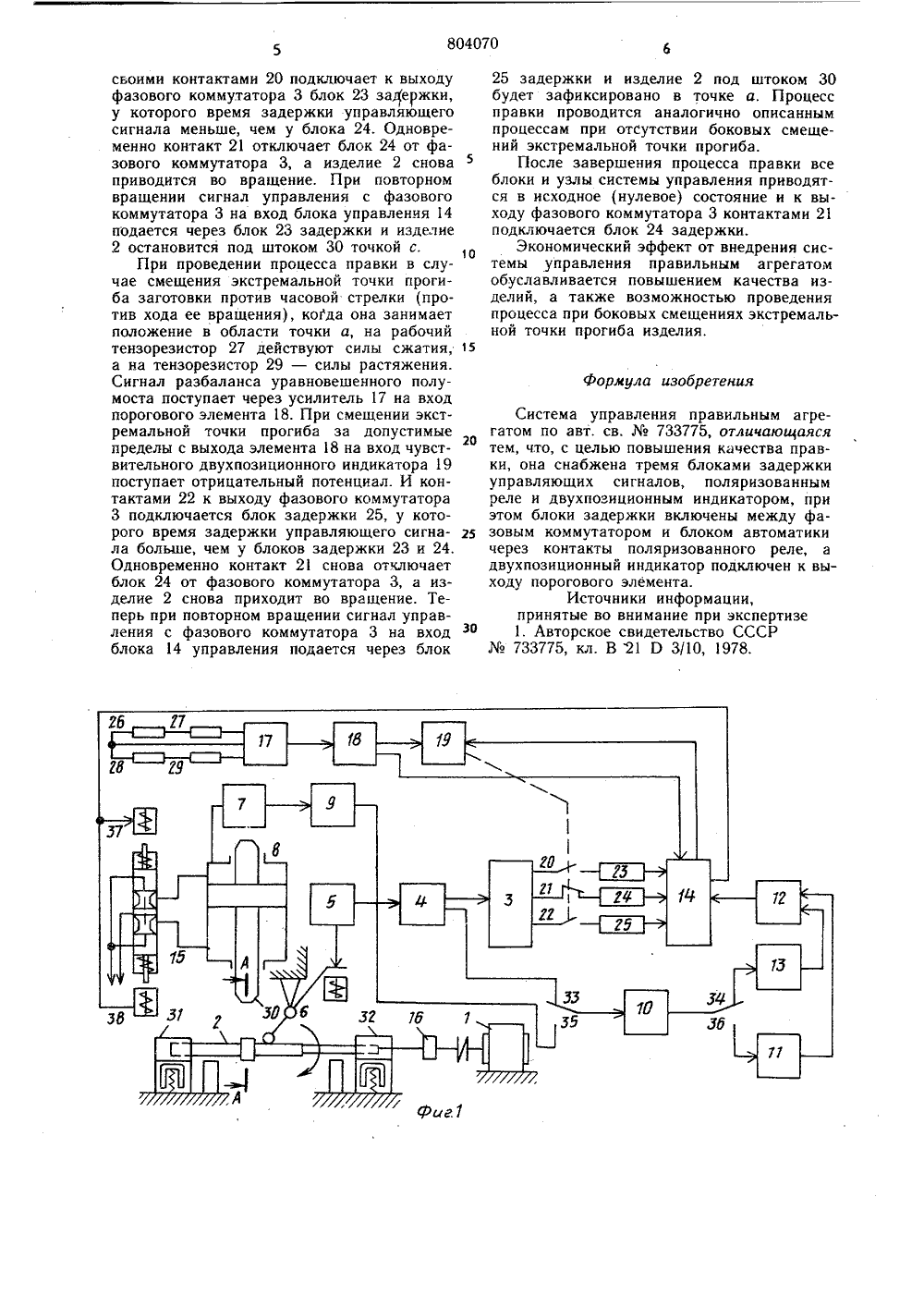
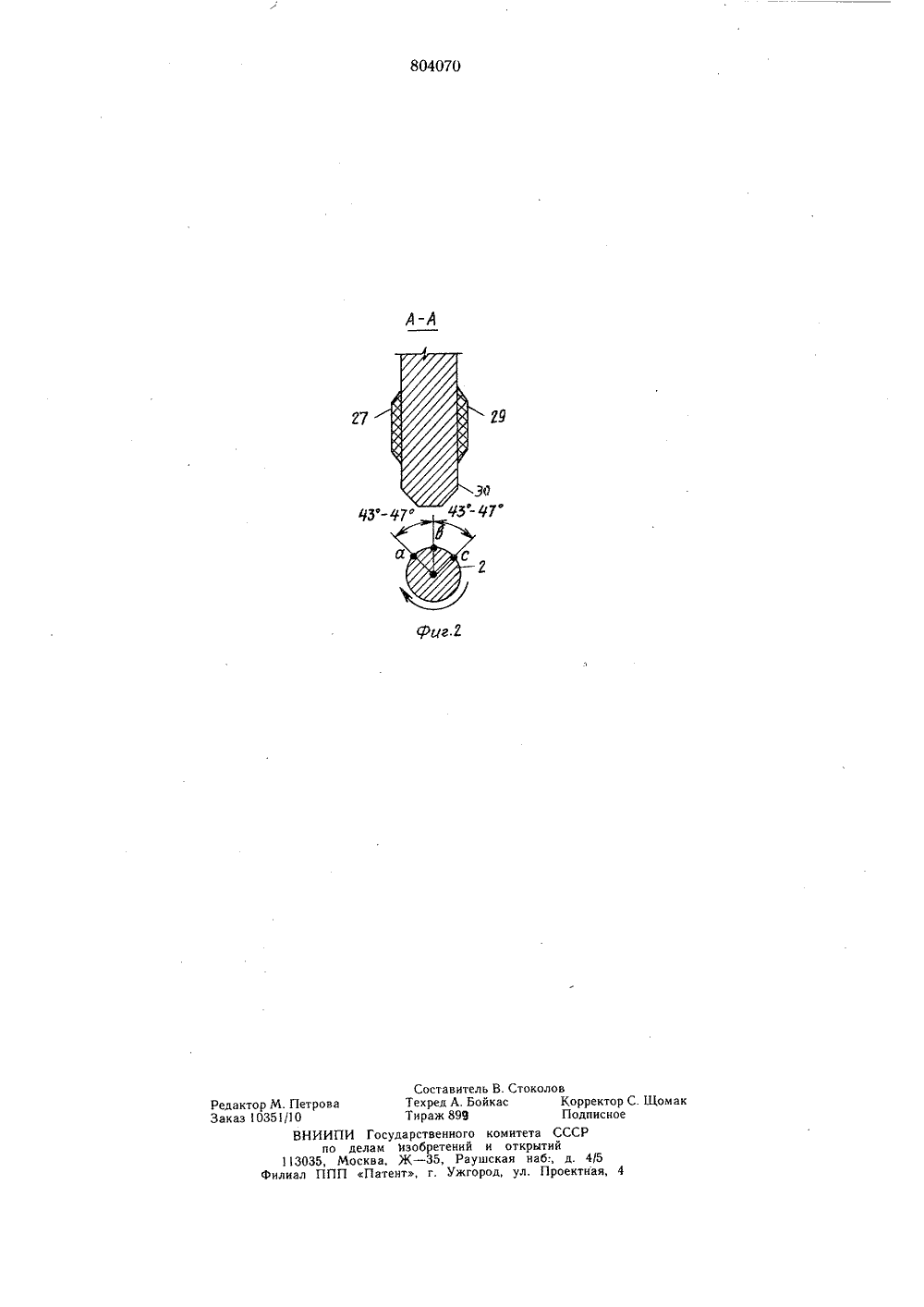
многопороговый логический элемент 10, задатчик 11 давления, схему 12 совпадения, которая логически связана с блоком 13 промежуточной памяти и через задатчик 11 давления с многопороговым логическим элементом 10. Элемент 10 при вращении заготовки 2 измеряет величину прогиба и задает величину усилия правки (заносит значение экстремума напряжения, пропорциональное максимальной амплитуде прогиба изделия, в блок 13 промежуточной памяти, а при проведении процесса правки изделия из о меряет величину давления жидкости в гидро- цилиндре 8, к штоку которого прикреплен блок. Система также содержит электроннорелейный блок 14 автоматики, золотник 15 силового гидроцилиндра 8, редуктор 16 ме ханизма вращения изделия, На один из входов блока 14 автоматики последовательно подключены тензометрический .усилитель 17, пороговый элемент 18 и чувствительный двух- позиционный индикатор 19, на выходе которого включено поляризованное реле (на черго На втором обороте вращения заготовки напряжение измеряется многопороговым логическим элементом 10 и значение экстремума заносится в блок 13 промежуточной памяти.Как только сигнал на выходе преобразователя 4 достигает экстремума, снова сратеже не показано) и входит в индикатор 19 через контакты 20 - 22 которого фазовый коммутатор 3 подключен к блокам 23 - 25 задержки управляющих сигналов. Вых 9 ды блоков задержки подключены к блоку автоматики 14. На вход тензометрического усилителя 17 подключен датчик изгибающих усилий штока, выполненный в виде уравновешенного полумоста, образованного из тензорезисторов 26 - 29, смонтированных на боковой поверхности штока 30 (по его пе- зо хриметру) под углом 90 друг относительно друга, Тензорезисторы 27 и 29, расположенные по обе стороны от оси изделия, являются рабочими, а тензорезисторы 26 и 28 - компенсационными.Система работает следующим образом.Изделие 2, закрепленное в качающихся центрах 31 и 32 приводится во вращение электродвигателем 1 посредством редуктора 16. Величина биения заготовки посредством щупа 6 измеряется датчиком 5 перемещения и преобразуется преобразователем 4 в напряжение, которое подается на вход фазового коммутатора 3. Когда сигнал напряжения, пропорциональный амплитуде прогиба заготовки, достигает экстремума, фазовый коммутатор 3 срабатывает и через 45 нормально замкнутые контакты 21, блок 24 задержки и блок 14 автоматики подключает вход многопорогового и логического элемента 10 контактами ЗЗ к выходу преобразователя 4 и контактами 34 логические выходы элемента 10 - к входу блока 135 О промежуточной памяти. батывает фазовый коммутатор 3 и через блок 14 автоматики отключает электродвигатель 1, в результате чего заготовка 2 фиксируется экстремальной точкой прогиба непосредственно под бойком силового гидро- цилиндра 8 правки. Это приводит в исходное (нулевое) состояние многопороговый логический элемент 10 и контактами 35 подключает его вход к преобразователю 9 сигнала, а контактами 36 подключает его логические выходы на вход задатчика 11; подключает схему 12 совпадения к блоку 13 промежуточной памяти и задатчику 11 давления; посредством электромагнитов 37 и 38 включает золотник 15 силового гидро- цилиндра 8, который своим бойком давит на заготовку, устраняя ее изгиб.Величина давления жидкости в рабочей полости силового гидроцилиндра измеряется датчикоми преобразуется преобразователем 9 сигнала в напряжение, которое подается на вход многопорогового логического элемента 10. Как только напряжение на входе элемента 10 достигает порога срабатывания каскада, логически связанного через задатчик 11 давления и схему 12 совпадения с тем каскадом блока 13 промежуточной памяти, который сработал от много- порогового логического элемента (при включении элемента 10 для измерения величины прогиба и задания усилия правки) при максимальном сигнале напряжения, соответствующем экстремальной точке прогиба заготовки. из схемы совпадения поступает сигнал в блок 14 автоматики, который посредством электромагнитов 37 и 38 переключает золотник 15 силового гидроцилиндра 8 и боек поднимается.Если во время процесса проведения правки изделия происходит боковое смещение экстремальной точки прогиба, то на боек со штоком начинают воздействовать эксцентричные силы сопротивления. Моменты от эксцентричных усилий, стремящиеся свернуть неподвижные в поперечном направлении относительно оси изделия шток с силовым гидроцилиндром, создают распорные усилия в уплотнениях, вызывают смещение (перекосы) некоторых деталей силового гидроцилиндра по отношению к станине. На шток эти усилия воздействуют как изгибающие. При смещении экстремальной точки прогиба по часовой стрелке (по ходу вращения изделия), когда она стремится занять положение С, на рабочий тензорезистор 27 действуют силы растяжения, а на тензорезистор 29 - силы сжатия. Сигнал разбаланса уравновешенного полумоста поступает через тензометрический усилитель 17 на вход порогового элемента 18. При смещении экстремальной точки прогиба за допустимые пределы с выхода элемента 18 на вход чувствительного двухпозицонного индикатора 19, на выходе которого включено поляризованное реле, поступает положительный потенциал. Реле индикатора 19своими контактами 20 подключает к выходу фазового коммутатора 3 блок 23 заюежки, у которого время задержки управляющего сигнала меньше, чем у блока 24. Одновременно контакт 21 отключает блок 24 от фазового коммутатора 3, а изделие 2 снова приводится во вращение, При повторном вращении сигнал управления с фазового коммутатора 3 на вход блока управленчя 14 подается через блок 23 задержки и изделие 2 остановится под штоком 30 точкой с.При проведении процесса правки в случае смещения экстремальной точки прогиба заготовки против часовой стрелки (против хода ее вращения), коРда она занимает положение в области точки а, на рабочий тензорезистор 27 действуют силы сжатия, 15 а на тензорезистор 29 - силы растяжения. Сигнал разбаланса уравновешенного полу- моста поступает через усилитель 17 на вход порогового элемента 18. При смещении экстремальной точки прогиба за допустимые пределы с выхода элемента 18 на вход чувствительного двухпозиционного индикатора 19 поступает отрицательный потенциал. И контактами 22 к выходу фазового коммутатора 3 подключается блок задержки 25, у которого время задержки управляющего сигна ла больше, чем у блоков задержки 23 и 24. Одновременно контакт 21 снова отключает блок 24 от фазового коммутатора 3, а изделие 2 снова приходит во вращение, Теперь при повторном вращении сигнал управления с фазового коммутатора 3 на вход блока 14 управления подается через блок 25 задержки и изделие 2 под штоком 30 будет зафиксировано в точке а. Процесс правки проводится аналогично описанным процессам при отсутствии боковых смещений экстремальной точки прогиба.После завершения процесса правки все блоки и узлы системы управления приводятся в исходное (нулевое) состояние и к выходу фазового коммутатора 3 контактами 21 подключается блок 24 задержки.Экономический эффект от внедрения системы управления правильным агрегатом обуславливается повышением качества изделий, а также возможностью проведения процесса при боковых смещениях экстремальной точки прогиба изделия,формула изобретенияСистема управления правильным агрегатом по авт. св.733775, отличающаяся тем, что, с целью повышения качества правки, она снабжена тремя блоками задержки управляющих сигналов, поляризованным реле и двухпозиционным индикатором, при этом блоки задержки включены между фазовым коммутатором и блоком автоматики через контакты поляризованного реле, а двухпозиционный индикатор подключен к выходу порогового элемента.Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР733775, кл. В 21 0 3/10, 1978.804070 г,2 СоставитеТехред А. Б Тираж 899 Редактор М. ПетровЗаказ 10351/10ВНИИ ПИ Государственногопо делам Изобретений113035, Москва, Ж - 35, Рау Филиал ППП Патент, г. Ужго ь В. Стоколовйкас Корректор С. ЩомаПодписноекомитета СССРн открытийшская наб:, д. 4/5од, ул. Проектная, 4
СмотретьЗаявка
2581862, 21.02.1978
ПРИБОРОМЕХАНИЧЕСКОЕ ОБЪЕДИНЕНИЕ"КУРГАНПРИБОР"
МАНИЛО ИВАН ИВАНОВИЧ
МПК / Метки
МПК: B21D 3/10
Метки: правильнымагрегатом
Опубликовано: 15.02.1981
Код ссылки
<a href="https://patents.su/4-804070-sistema-upravleniya-pravilnymagregatom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления правильнымагрегатом</a>
Блок управляемой задержки

Номер патента: 1424058
Опубликовано: 15.09.1988
Авторы: Баранцев, Гудым, Майструк, Фуников
МПК: G11C 21/00
Метки: блок, задержки, управляемой
...заде ржки и полосачастот входного сигнала увеличатся в 2 разя,Основным чзлам ус гройс тнд является рециркулятор, предназначенный для записи, сжатия а времени и задержки сигнала, Он мажст б.)ть ыпсл - лен в дналагсиам или цифровом варианте и иметь рдэли ные извес.тыс дппаратурные решения. 3 устрайсте применены цифровые рециркулятары, ыпалненные на микросхемах серии 505 155, Пля синхрс ниалии працсгс в загиси и сдвига сигнала в рециркуляторе используется паследавд;елнос ь с ныхада генератора , пчльав, алев дуюшая с периодам Т, , и импу.ьс записи сигнала в рспирклятар алев1дуюший с периодом 1,= Т/К = Т 1, соответственно с выхода элемента ИЛИ 9 рециркулятора 2 или с ньхода блока 10 сравнения реццркулятора 3, Период5 циркуляции выборки...
Устройство для моделирования радиотелеграфного канала связи

Номер патента: 1034053
Опубликовано: 07.08.1983
Авторы: Волков, Котов, Филиппов
МПК: G06G 7/48
Метки: канала, моделирования, радиотелеграфного, связи
...Блок модификации констант содержит датчик псевдослучайного сигнала, генератор импульсов, счетчик, коммутатор импульсов, коммутатор чисел, группу реверсивных счетчиков, выход генератора импульсов подключен к входу счетчика, группа выходов которого является группой адресных выходов блока модификации констант и подключена соответственно к группе управляющих входов коммутатора чисел, группа выходов которого является группой выходов данных блока модификации констант, информационные входы коммутатора чисел соединены соответственно с разрядными выходами реверсивных счетчиков группы, суммирующие входы которых объединены и подключены к первому выходу коммутатора импульсов, второй выход . которого соединен с вычитающими входаьщ реверсивных...
Устройство для контроля электрического монтажа

Номер патента: 1151991
Опубликовано: 23.04.1985
Авторы: Бабаев, Бакакин, Исаев, Толчинский
МПК: G01R 31/02, G06F 11/28
Метки: монтажа, электрического
...занесением логической единицы в соответствующий разряд 5 .регистра 39.Начальный адрес набирается при помощи клавиатуры 19 и посылвается в счетчики 28 и 29.Синхронизация всех блоков устройства достигается работой генератора 9, который вырабатывает четырехтактную последовательность импульсов Т 1-Т 4.Работа устройства начинается 15 от пускового импульса, который вырабатывается одним из формирователей в блоке 20 при включении соответствующего переключателя клавиатуры 19.С выхода блока 20 сигнал пуска , 20 поступает на вход элемента ИЛИ 43 блока 5 и включает триггер 44, С выхода последнего сигнал разрешения поступает на входы элементов И 45 и 46 и формирователя 48, на вторыевходы которых поступают импульсы с выхода генератора 9, С выхода...
Устройство для питания гальванических ванн импульсным током

Номер патента: 1446201
Опубликовано: 23.12.1988
Автор: Абдулин
МПК: C25D 21/12
Метки: ванн, гальванических, импульсным, питания, током
...однородное электромагнитное поле в электролите между катодом и анодом только во времяпротекания поляризующего тока. Поокончании переходного процесса токстановится равным нулю, и тиристоры6 и 7 закрываются.Обратный перезаряд невозможенпока не откроются тиристоры 4 и 5.При поступлении четного отпирающего импульса (диаграмма в) на тиристоры 4 и 5 они открываются, образуяцепь обратного перезаряда конденса бторов 9 через гальваническую ванну15 и катушку 8 индуктивности. Приэтом конденсатор 9 перезаряжаютсяот -П, до +П, (диаграмма д), причемтак перезаряда проходит через ванну 25в том же направлении, что и при работе тиристоров 6 и 7 - диаграмма е.Через время, определяемое блоком14 регулируемой задержки, отпирающий сигнал (диаграмма г)...
Устройство для сопряжения периферийного устройства с эвм

Номер патента: 1596339
Опубликовано: 30.09.1990
Авторы: Буянов, Молчанов, Осипов, Фокеев
МПК: G06F 13/00
Метки: периферийного, сопряжения, устройства, эвм
...всех подсистем и сигнал считывания запросов, по которому блок управления каждой подсистемы (илич периферийного устройства), хранящии сигнал запроса, помещает на линииданных магистрали 9 коды,индентифицирующие источники запросов в подсистеме,На линиях данных устанавливается, таким образом, запросное слово системы. По получении синхросигналов от всех блоков управления подсистемами блок 3 устанавливает ответный синхросигнал, после .приема которого ЭВМ считывает запросное слово с линий данных магистрали через блоки 7 и б. ЭВМ заканчивает операцию на общей шине, а блок 3 - на магистрали периферийной системы, Затем ЭВМ по программе осуществляет поиск источника запроса на обработку требования в зависимости от принятого в периферийнойсистеме...
Предыдущий патент: Правильно-колибровочный стан
Следующий патент: Устройство для правки деталей
Случайный патент: Способ эксплуатации установки порционного вакуумирования стали