Устройство для программного управления положением объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 744466
Автор: Трубников

Текст
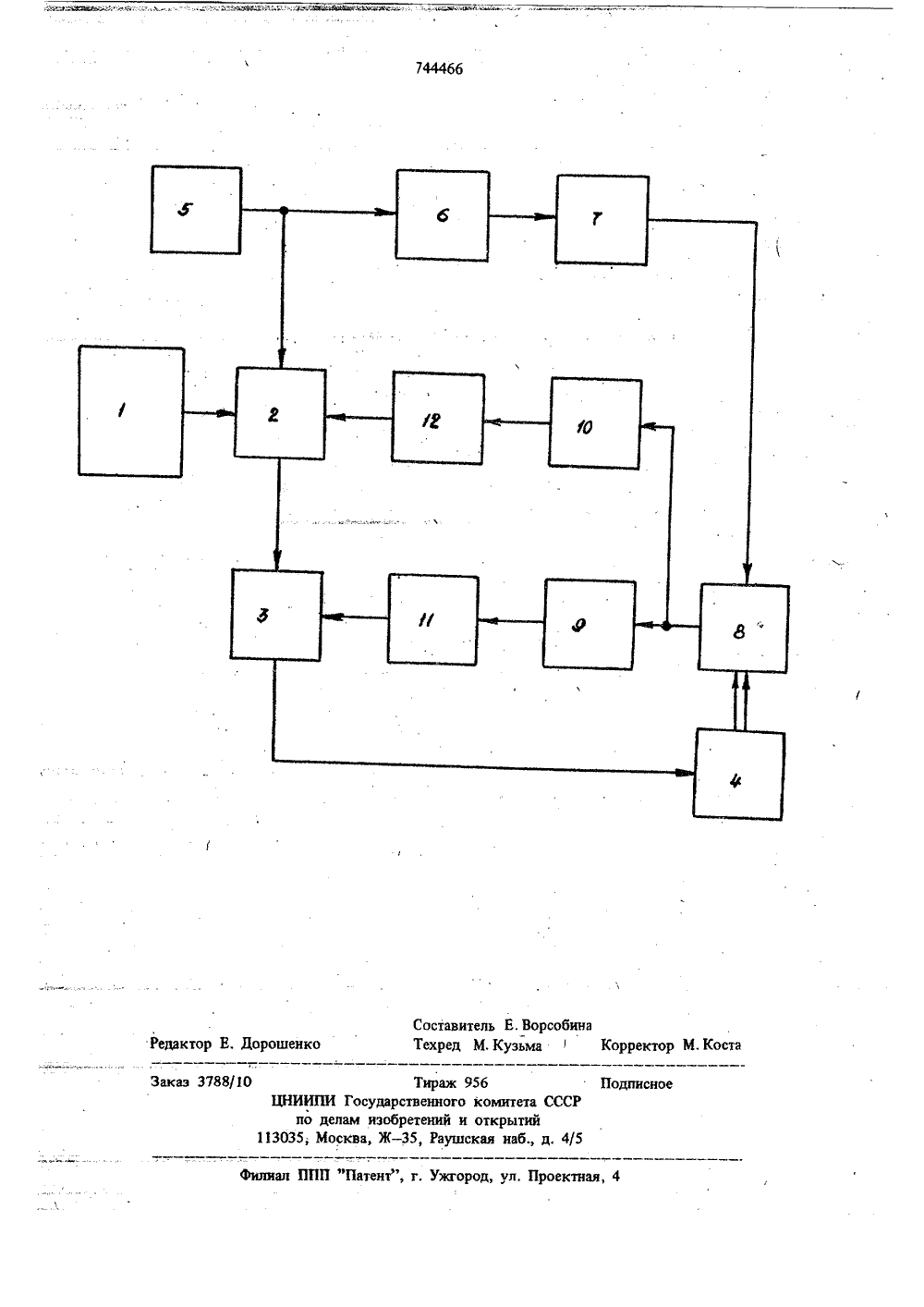
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик 1 1 74446641,гл(5)М. Кл. 6 05 В 19/18 с присоединением заявки Лов Гооударстввниый комитет(23) Приоритет Опубликовано 30,06,80,Бюллетень Рй 24Дата опубликования описания 30,06.80 Ао делам изобретеиий и открытий(72) Автор изобретения Г. Н. Трубников Особое конструкторское бюро технической кибернетики Ленинградского политехнического института им. М. И. Калинина(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЬЕКТАИзобретение относится к программному управ лению, в частности к фазовым устройствам про. граммного управления с числовым вводом информации и может быть использовано, прежде всего, в промышленных роботах и станках5 с программным управлением, применяемых в различных областях народного хозяйства.Известно устройство для программного управления положением объектов с числовым вводом информации, в котором контур управления поло-жением содержит преобразователь числа в сдвиг фазы, преобразователь положения в сдвиг фазы и узел сравнения фаз, выходной сигнал которого управляет приводом, В качестве преобразователя положения используется фазовращатель на базе индукционного датчика, например, вращающегося трансформатора, цепь питания которого состоит из последовательно соединен. ных генератора импульсов, делителя частоты и формирователя напряжения 11.ФНаиболее боизким по технической сущности к предлагаемому является фазовое устройство для программного управленияс числовым вводом информации, содержащее последовательно 2соединенные устройство задания программы,узел совпадения чисел, узел сравнения фаз ипривод, последовательно соединенные генератор импульсов, делитель частоты, формирователь синусоидального напряжения, фазоврашательи формирователь импульсов, выход которогосоединен с другим входом устройства сравнения фаэ, промежуточные выходы делителя частоты соединены с другими входами узла совпадения чисел. Последний выполняет функциюпреобразования числа в сдвиг фазы. В моментсовпадения кода преобразуемого числа и кодачисла, снимаемого с промежуточных выходовделителя частоты, на выходе узла совпадениячисел появляется импульс, временной сдвигкоторого относительно момента исходногосостояния делителя частоты пропорционален весупреобразуемого числа, Напряжение питания фазовращателя синхронизировано прямоугольнымиимпульсами с выхода делителя частоты. Фазаэтих импульсов является опорной (задающейначало отсчета) для сдвигов фаз, пропорциональных заданному и текущемуположениям (21,3 . 744466Недостатком описанного устройства является мирователь 11 имту, " фмтульсов, второи формирова 1 относительно низкая точность управления поло- тель 12 импульсов,жением. Эта точность определяется в основном вместе с локами 9 и 10точностью преобразования положения в сдвиг .цепочками представляют собой фазовра.фазы, так как погрешность преобразования щатель с двумя выходами, Элементы блока 9числа не превышает погрешности квантования соединены в обратной последовательности пои может быть сведена к малой величине соот- отношению к элементам блока 10, поэтому приветствуюшим выбором разрядности, а погреш изменении угсность узла сравнения фаз можно учитывать м 8ени углового положения ого а анс о .матора фазы напряжений, снимаемых с блопоскольку выделение рассогласования - сдвига ков 9 и 10в и сдвигаются в противоположныхфаэ импульсных сигналов - и преобразование направлениях. Э тот сдвиг фаз, пропорциональ.его в широтно-модулированный сигнал может кый угловому положению ротора, преобразу.быль выполнено быстродействующей триггерно схемои.ется в интервал времени с помощью форми.рователей 11 и 12, выделяющих короткие им-Погрешность преобразования положения в пульсы в мом ньсы в моменты перехода синусоидальногосдвиг фазы с помощью широко распростра- яжения через нулевой уровень в одн стоненных датчиков - сельсинов и врашающихсяяжения ур дну стотрансформаторов - имеет существенную вели- Устройство рабоо ра отает следующим образом.чину, особенно при воздействии дестабилизирую- Положение обие о ъекта задается по программеших факторов, таких как изменение температу- .в виде двоичного и20о параллельного кода числа,ры, частоты питания и других, Эта погрешность поступающего из задатчика, то число пре.1, Эможет значительно превышать инструментальную образуется в сдвиг фазы (интервал в емени спогрешность датчика,в сдвиг азы интервал времени спомощью циклически работающего на вычитаТаким образом, описанное выше устройства ние счетчик 2а, в которыи импульс формиро.не позволяет реализовать высокую инструмен- вателя 12 занбросит преобразуемое число. Врементальную точность датчиков, что является его ной сдви бнедостатком.ой сдвиг момента о нуления счетчика 2 относительно момента записи и счетчик преобраЦель изобретения - повышение точностиустроиства.ч- зуемого числа пропорционален весу числа.Таким образом, опорной фазой системы а .Поставленная цель достигается тем, что в ер ф мы управ.в, ления служит фаза сигнала, снимаемого с выустройство для программного управлений поло- хода фазосдвигао б 10 ( .цепочки .азосдвигющего блока 10 (ВС.цепочки .жением объекта, содержащее последователмо" " р,цщоСдвиги фаз (интервалы времени) и опосоединенные задатчик программы, счетчик, блокок циональные заданному ио прог амме положесравнения, привод и датчик положения, напримеру й р е положеапр ер нию, а также текущему положению авниваютвращающийся трансформатор, а также генЕратор ", и . д л ован.35 ся блоком Зс вЫходной ши 01 НО МОимпульсов, выход которого подключен ко вто- ный сигнал которого управляет п иводом.рому -входу счетчика и через последовательно прПри изменении температуры ок аюией" " сочединейнчыче делитель, частоты и формирователь е фР тур руж ийсреды фазы напряжений снимаемых с блоковнапряжения - ко второму входу вращающегося 9 и 10 (и (а следовательно и фазы сигналов натрансформатора, первый выход которого подклю. вход б 3)ходах лока ) смещаются в о ом нап мьчен через последовательно соединенные пе выйе первы нии, практически, на одинаковую величину, чтофазосдвигающий блок и первый формирователь об еспечивает отсутствие температурной погрешносимпульсов ко второму входу блока сравнения, ти управленияуправления положением, Имеет место такжевведены второй фазосдвигающий блок и второй резкое уменьуменьшение влияния на точность рядаформирователь импульсов, выход которого иод- других факто- 45 кторов, например ухода частоты ииключен к третьему входу счетчика, выход вто- тания тран-8,трансрматора, что позволяет снизитьрого фазосдвигающего блока соедийен со вто- требование стабильностиьности частоты генератора 5;рым выходом вращающегося трансформатора, а Численная оценкоценка увеличения точности управвыход - со входом второго формирователя им- пения положение-"ПУЛЬСОВ.жеи ем зависит от температурногодиапазона работы системы управления, а такжеНа чертеже изображена блок-схема устрой- от количества ирименяименяемых датчиков. По ре, полученным при использовании наиства для программного управления положением эультатам получобъекта.об более точных из серийно выпускаемых одноот.сных вращающихся транс.Устройство содержит эадатчик 1 йрограммы, счетных сииусно-косинусньсчетчик 2, блок 3 сравнения, привод 4, гене. форматоро ир фи их однофазном питании и при.ритор 5 импульсов; делитель 6 частоты,фор- ненни двух (ВСдвух ( -цепочек) погрешность управлемирователь 7 напряжения, вращающийся транс- ния положениеположением может быть сведена к велиформатор 8,первый фазосдвигающий блок 9; чине порядка 5чине порядка мин угла в диапазоне температувторой фазосдвигающий блок 10, первый фон- ры 10 - 50 С окруж- окружаюшеи среды,5 74446Этот эффект увеличения точности в наибольшей степени проявляется в системах программного управления промышленными роботами, осо. бенность которых. состоит в формировании программы методом обучения при ручном управлении исполнительным органом, благодаря чему в погрешность программного управления положением не входит систематическая погрешность измерения положения, так как она учитывается при обучении. Эта особенность еше бо. 10лее увеличивает преимущество в точности предлагаемого технического решения по сравнению с известным техническим решением,Другой особенностью промьппленных роботов является их использование в условиях, лебла. 15 гоприятных для человека, в том числе при повышенной температуре (загрузка печей обжига, нанесение покрытий на горячие изделия, в литей. ном производстве и тд,).При этом датчики положения, установленные на рабочем органе, подвергаются повышенно. му температурному воздействию, не постоянному по величине, что выдвигает особые требования к температурной стабильности измерительной части, устройства, Этим требованиям удовлетворяет предлагаемое устройство для программного управления объектом, обеспечива. ющее высокую точность управления положением в условиях больших изменений температуры в рабочей зоне промышленного робота. 6Формула изобретения Устройство для программного управления по.ложением объекта, содержащее последовательносоединенные эадатчик программы, счетчик, блок,сравнения, привод и датчик положения, например,вращающийся трансформатор, а также генераторимпульсов, выход которого подключен ко вто.рому входу счетчика и через последовательносоединенные делитель частоты и формировательнапряжения - ко второму входу вращающегосятрансформатора, первый выход которого подключен через последовательно соединенные первый фазосдвигающий блок и первый формирователь импульсов ко второму входу блокасравнения, о т л и ч а ю щ е е с я тем,что, сцелью повышения точности устройства, в неговведены второй фазосдвигающий блок и вто.рой формирователь импульсов, выход которогоподключен к третьему входу счетчика, выходвторого фазосдвнгающего блока соединен со;вторым выходом вращающегося трансформатора,а выход - со входом второго формирователяимпульсов,Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССР М 428358,кл. 605 В 15/02, 1972.2. Авторское свидетельство СССР Я 167117,кл, 6 05 В 19/18, 1963 прототип)., ул. Проектн Тираж ЦНИИПИ Государственно по делам изобретений 113035; Москва, Ж - 35, Рауш
СмотретьЗаявка
2605601, 25.04.1978
ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ ЛЕНИНГРАДСКОГО ПОЛИТЕХНИЧЕСКОГО ИНСТИТУТА ИМ. М. И. КАЛИНИНА
ТРУБНИКОВ ГЕОРГИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: объекта, положением, программного
Опубликовано: 30.06.1980
Код ссылки
<a href="https://patents.su/4-744466-ustrojjstvo-dlya-programmnogo-upravleniya-polozheniem-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления положением объекта</a>
Устройство для измерения несущей частоты одиночного свч импульса

Номер патента: 1444676
Опубликовано: 15.12.1988
Авторы: Августинович, Шиян
МПК: G01R 23/00
Метки: импульса, несущей, одиночного, свч, частоты
...длительностью входного СВЧ-импульса, по окончании которого ключ снова возвращается в исходное состояние "Закрыто. Исследуемый импульс, поступив в коаксиальную линию 8 задержки, доходит до ее замкнутого конца и отражается, возвращаясь ко входу линии и выходу ключа 5. Здесь снова происходит отражение от низкого входного сопротивления ключа 5 в обратном направлении. В результате, если длина линии 8 задержки такова, что вре 40 мя двойного пробега исследуемого импульса. по ней превышает его длительность, на вспомогательном выходе направленного ответвителя 7 имеем серию радиоимпуль 1 ов, иллюстрируемую вертикальными прямыми на фиг.2. Ис" пользование направленного 7 ответвителя в преобразователе позволяет отбирать малую часть энергии...
Устройство для сравнения частот и фаз двух последовательностей импульсов

Номер патента: 490037
Опубликовано: 30.10.1975
Автор: Хламов
МПК: G01R 23/00
Метки: двух, импульсов, последовательностей, сравнения, фаз, частот
...триггеры 2, 3 переходят пз состояния совпадения по 20 фазе в состояние протпвофазы. Сигнал на выходе схемы И 1 появляется при совпадении импульсов на ее входах, а на выходе схемы отрицания равнозначности при положении триггеров 2, 3 в противофазе, Сигнал с выхо да схемы 5 отрицания равнозначности черезлогический расширитель 6 импульсов поступает на запрещающий вход схемы 4 запрета тем самым запрещает прохождение через нее выходного сигнала схемы И 1. При совпа.30 дении фаз триггеров 2, 3 и передних фронтов490037 Вл . Рог импульсов сравниваемой и опорной частоты запрещающий сигнал не вырабатывается схемой 5 отрицания равнозначности, в результате выходной сигнал схемы И 1 беспрепятственно проходит через схему 4 запрета на выход...
Устройство для управления группой n статических преобразователей частоты, включенных параллельно по входу и выходу

Номер патента: 1388973
Опубликовано: 15.04.1988
Авторы: Анисимов, Артюхов, Бочков, Кантер, Серветник, Томашевский
МПК: H02M 5/44
Метки: включенных, входу, выходу, группой, параллельно, преобразователей, статических, частоты
...16 появляетл ся сигнал единичного уровня, которыйрез приводит к отключению одного преобие разователя из группы работающих преобразователей снятием импульсов упкий 20 равления с входа выпрямителя 1, переводя его в состояние готовности коперативному включению, при этомконденсатор фильтра 2 указанного блока остается заряженным. Одновременно25 отключается еще один преобразователь,находившийся до этого в состоянии готовности к включению, посредствомразмыкания силовых ключей 5 и 6,Здесьг. 40, в 0 - величины, расширяющие диаЗО пазон, характеризуемый постоянствома структуры силовой схемы статическихпреобразователей. Они задаются напряжением смещения Ц подаваемым навы- прямой вход первого компаратора 15ав- и инверсный вход второго...
Цифровой измеритель частоты и фазы гармонического сигнала

Номер патента: 1626176
Опубликовано: 07.02.1991
Авторы: Волохов, Зайченко, Кротенко, Пискорж
МПК: G01R 23/00, G01R 25/00
Метки: гармонического, измеритель, сигнала, фазы, цифровой, частоты
...21 переписывает ся н регистр 31Содержимое последне" го, которым является код. Ия фазы ниж ней опорной частоты Г, поступает на вход пос гоянцого запоминающего уст ройства 32 и на второй вход суммато рд 29, где суммируется с кодом шв фдэы опорной частоты бЕ, поступающим на первый вход сумматора 29 с выхода регистра 28По окончании управляющего сигнала с выхода 27,7 синхронизатора 5 ком мутатор 30 переключается на пропуска цие на вход регистра 31 результатов сложения, выполняемого сумматором 29Запись результатов сложеция в регистр 31 осуществляется каждым 1-м (8=2, 3,Ь) синхроимпульсом с выхода 271 синхронизатора 5Период следо вдния этих синхроимпульсов равен Т/Ь.В результате (Ь)-кратного суммирования содержимого регистров 28 и 31, в...
Способ измерения частоты и фазы сигнала

Номер патента: 420973
Опубликовано: 25.03.1974
Автор: Изобре
МПК: G01S 13/02
...что опорное значение (оценка) параметра, подаваемое на дискриминатор измерителя, оказывается квантованным по уровню. Квантование опорного значения параметра, подаваемого на дискриминатор измерителя, создает шум квантования, приводящий к уменьшению чувствительности измерителя и к появлению колебательного режима работы измерителя.Предлагаемый способ нестатков и отличается от исигнал обратной связи форсигнала, сформированного пзаписанного в реверсивномнала, сформированного по нгового интегратора. На чертеже приведена блок-схема устройства, реализующего предлагаемый способ, гдеЛ - входной параметр (фаза, частота илизадержка) сигнала, Л"- оценка входного5 параметра сигнала.Устройство содержит дискриминатор 1,фильтр 2, усилитель 3,...
Предыдущий патент: Устройство для числового программного управления станком
Следующий патент: Устройство для управления ренгеновским дифрактометром
Случайный патент: С н и исм и )институт механизированного г; руиюго строятельно-монтажиого