Система дистанционного управления питающими механизмами балочного типа алюминиевых электролизеров
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 692912
Авторы: Звенигородская, Климовицкий, Львович, Маньковская, Меликянц, Рабинович, Сажин, Татиевский, Шиндельман
Текст
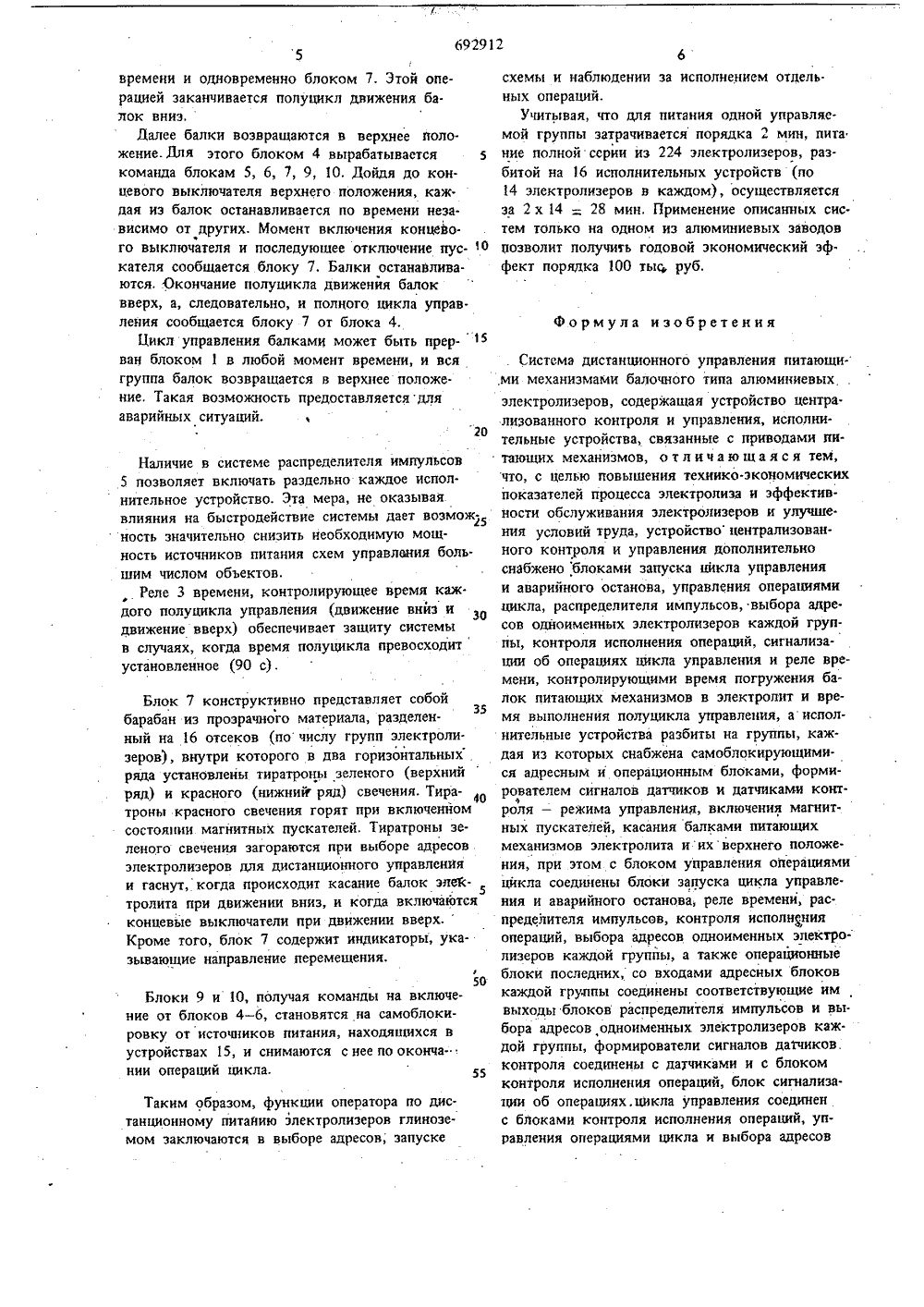
б,са 4 юдва ), а Союз Советекмж Соцналиетимесеа Республик, Кл.25 С 3/20 оединеннем заявкиГееудеретееннмй неметет СССР ее делам нэебретеннй а етнрнтнйПриорите Опубликовано 25.10.79, БюллетеньВата опубликования описания 30.10.7, В. Е. Львович,инович, С, Б. Сажи имовицкии ц,Б,В.Раб Р. Киндель ан сесоюзныи научно.исследоват институт "Цветметав ьскии и к матика структорски итель(54) СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПИТА МЕХАНИЗМАМИ БАЛОЧНОГО ТИПА АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВИзобретение относится к автоматизированным системам управления технологическими процессами в алюминиевой отрасли цветной металлургии.Наиболее близким к изобретению по технической сущности и достигаемому результату яв ляется автоматизированная система управления типа "Алюминий", содержащая устройство централизованного контроля и управления и исполнительные механизмы со схемами управления исполнительными приводами, в частности, ано дами. Включение исполнительных адресных ре ле осуществляется по радиальным кабельным трассам, использующим число проводов, равное числу электролизеров плюс один общий провод для всех, а ойерационных реле, общих для всех электролизеров - по кольцевым трассам. При этом переход с одного злектролиэера на другой возможен только после полной отработки регулирующего воздействия 111.В АСУ ТП электролиза алюминия, где функция и число объектов управления значительно расширены по сравнению с известными системами, предъявляются более высокие требования 2к быстродействию, надежности, эффективностии экономичности,В автоматизированных системах управлениящггание электролизеров глиноземом являетсяодиой из основных функций. Дистанционныйрежим. его обеспечивает живучесть системы впериоды отказов управляющего комплекса, иво время проведения профилактических работс аппаратурой.Однако дистанционно управлять питающимимеханизмами подобно управлению анодами невозможно по причинам, связанным с необходимостью часто питать каждый электролизер иболее сложным алгоритмом управления,Цель изобретения - повышение технико.экономических показателей процесса электролизаалюминия и улучшение эффективности обслу.живания электролизеров условий труда.Указанная цель достигается тем, что входя.щее в систему устройство централизованногоконтроля и управления дополнительно снабжено блоками запуска цикла управления и ава.рийного остановауправления операциями цикла, распределителя импульсов, выбора адресов692912 3одноименных электролизеров каждой группы,контроля исполнения операций, сигнализацииоб операциях цикла управления и реле времени, контролирующими время погружения ба" "лок питаюцих механизмов в электролит и время выполнения полуцикла управления, а испол.нительные устройства разбиты на группы, каждая из которых снабжены самоблокирующими.ся адресным и операционным блоками, форми 4 эователем сигналов датчиков и датчиками конт-роля -режима управления, включения магнитных пускателей, касания балками питающихмеханизмов электролита и их верхнего положе.ния, при этом с блоком управления операциями цикла управления и аварийного останова,реле" времени, распределителя импульсов, конт"роля исполнения операций, выбора адресов од.йоименных электролизеров каждой труппы, атакже операционные блоки последних, со входами адресных. блоков каждой группы соединены соответствующие им выходы блоков распределителя импульсов и выбора адресов одноименных электролизеров каждой группы, форМйрователя сигналов датчиков контроля соединены с датчиками и с блоком контроля испол. 25нения операций, блок сигнализации об операци.ях цикла управления соединен с блоками контроля исполнения операций, управления операциями цикла и выбора адресов одноименных электролизеров каждой группы, схемы приводом 10 -"-ййтающих механизмов электролизеров каждойгруппы соединены с соответствующими адрес.ным и операционным блоками. На чертеже изображена принципиальная схе 35 ма предлагаемой системы.Система содержит блок 1 запуска цикла управления и аварийного останова, соединенный с блоком управления операциями цикла, ре. ле 2 времени погружения балок питающих ме 40 ханизмов в электролит, реле 3 времени полу- цикла управления; при этом оба реле време. ни соединены с блоком управления операциями цикла, блок 4 управлейия операциями цикла; блок 5 распределителя импульсов, соединенный45 с одним из входов адресных блоков всех групп исполнительных устройств; блок 6 выбора адресов одноименных электролизеров каждой груп пы, соединенный со вторым входом адресных блоков всех групп исполнительных устройств и50 с блоком сигнализации об операциях цикла уп. равления блок 7 сигнализации об операциях цикла управления, соединенный кроме блоков 4, 6 с блоком контроля исполнения операций; блок 8 контроля исполнения операций, соединенный кроме блоков 4, 7 с формирователями сигналов всех групп исполнительных устройств, адресные блоки 9, соединенные кроме блоков 5. 6 со схемами приводов питающих механиэ 4мов электролизеров, операционные блоки 10, соединенные кроме блока 4 со схемами приво. дов питающих механизмов электролизеров; формирователи 11 сигналов датчиков контроля, соединенные с блоком контроля исполнения опе раций; схемы 12 приводов питающих механизмов электролизеров, подключенные к адрес. ным и операционным блокам; датчики 13, сое. диненные с формирователями 11 сигналов.Блоки 1 - 8 составляют устройство 14 центра пизованного управления, которое размещено в центральном пункте управления. Блоки 9, 10, формирователи 11, схемы 12,датчики 13 составляют группы исполнительныхустройств 15, обслуживающие каждую группуиз четырнадцати электролизеров, и размещаются вблизи геометрических центров этих групп,Цикл управления группой балок питающихмеханизмов состоит из следующей последова.тельности операций: выбор адресов электролизеров, балками которых предполагается управлять; одновременный пуск выбранной группыбалок; .движение балок вниз; касание балокэлектролита и останов; погружение балок вэлектролит на задаваемое (до 1 О с) время ипоследующий их останов; движение балоквверх; останов балок концевыми выключате.лями верхнего положения; окончание циклауправления.Группу управляемых составляют электролизеры, балки которых имеют одинаковые порядковые номера в каждом исполнительном уст.ройстве,Адреса устанавливаются блоком 6, с помощью которого из режима дистанционного управления исключаются электролизеры, переведенные на режим местного или регламентногоуправления. Одновременно блоку 7 передается информация о подготовленных для дистанционного литания электролизерах. По индика.торам этого блока оператор может наблюдатьвесь ход питания группы электролнзеров.Запуская блок 1, включается блок 4, который включает блоки 10 и, через блоки 5 и 6;блоки 9, запускает реле 3 времени.О движении балок вниз сообщается блоку7 через блок 8 и формирователи 11 от датчи.ков, контролирующих включение магнитныхпускателей. Дойдя до касания с электролитом,каждая из балок останавливаетсянезависимоот других, Моменткасания и последующее от.ключение пускателя сообщается блоку.7 черезблок 8 и формирователи 11 от соответствую.щих датчиков.Вслед за остановом последней балки блок 4посылает команду блоками 5, 6, 9 и 10 накратковременное (до 10 с) движение вниз.Время погружения контролируется реле 2времени и одновременно блоком 7. Этой операцией заканчивается полуцикл движения ба. лок вниз.Далее балки возвращаются в верхнее положение.Для этого блоком 4 вырабатывается 5 команда блокам 5, 6, 7, 9, 1 О, Дойдя до концевого выключателя верхнего положения, каж. дая иэ балок останавливается по времени независимо от других. Момент включения концево%го выключателя и последующее отключение пус. о кателя сообщается блоку 7. Балки останавливаются, Окончание полуцикла движенйя балок вверх, а, следовательно, и полного цикла управления сообщается блоку 7 от блока 4.Цикл управления балками может быть прерван блоком 1 в любой момент времени, и вся группа балок возвращается в верхнее положение. Такая возможность предоставляется для аварийных ситуаций.20Наличие в системе распределителя импульсов 5 позволяет включать раздельно каждое испол.нительное устройство, Эта мера, не оказывая.влияния на быстродействие системы дает возможность значительно снизить необходимую мощность источников питания схем управлония боль. шим числом обьектов.Реле 3 времени, контролирующее время каждого полуцикла управления (движение внйз и движение вверх) обеспечивает защиту системы в случаях, когда время полуцикла превосходит установленное (90 с).Блок 7 конструктивно представляет собой35 барабан из прозрачного материала, разделенный на 16 отсеков (по числу групп электролизеров), внутри которого в два горизонтальных ряда установлены тиратроны зеленого (верхний ряд) и красного (нижние ряд) свечения. Тира- троны красного свечения горят при включенйом состоянии магнитных пускателей. Тиратроны зе. леного свечения загораются при выборе адресов электролизеров для дистанционного управления и гаснут, когда происходит касание балок эпек. тролита при движении вниз, и когда включаются концевые выключатели при движении вверх.Кроме того, блок 7 содержит индикаторы, указывающие направление перемещения.50Блоки 9 и 10, получая команды на включение от блоков 4 - 6, становятся на самоблокировку от источников питания, находящихся в устройствах 15, и снимаются с нее по окончании операций цикла.55Таким образом, функции оператора по дис. танционному питанию электролизеров глиноземом заключаются в выборе адресов, запуске схемы и наблюдении за исполнением отдель.ных операций.Учитывая, что для питания одной управляемой группы затрачивается порядка 2 мин, пита ние полной серии из 224 электролизеров, раз. битой на 16 исполнительных устройств (по 14 электролизеров в каждом), осуществляется за 2 х 14 = 28 мин. Применение описанных сис. тем только на одном из алюминиевых заводов позволит получить годовой экономический эф. фект порядка 100 тыс, руб.Формула изобретения. Система дистанционного управления питающи,ми механизмами балочного типа алюминиевых электролизеров, содержащая устройство централизованного контроля и управления, исполнительные устройства, связанные с приводами пи. тающих механизмов, отличающаяся тем, что, с целью повышения технико-экономических показателей процесса электролиза и эффективности обслуживания электролизеров и улучше ния условий труда, устройство централизованного контроля и управления дополнительно снабжено блоками запуска цикла управления и аварийного останова, управления операциями цикла, распределителя импульсов, выбора адресов одноименных электролизеров каждой группы, контроля исполнения операций, сигнализации об операциях цикла управления и реле времени, контролирующими время погружения балок питающих механизмов в электролит и время выполнения полуцикла управления, а исполнительные устройства разбиты на группы, каждая из которых снабжена самоблокирующимися адресным и операционным блоками, формирователем сигналов датчиков и датчиками контроля - режима управления, включения магнит. ных пускателей, касания балками питающих механизмов электролита иихверхнего положения, при этом с блоком управления операциями цикла соединены блоки запуска цикла управления и аварийного останова, реле времени, рас пределителя импульсов, контроля исполнения операций, выбора адресов одноименных электро- лизеров каждой группы, а также операционные блоки последних, со входами адресных блоков каждой группы соединены соответствующие им выходы блоков распределителя импульсов и вы. бора адресов одноименных электролизеров каждой группы, формирователи сигналов датчиков. контроля соединены с датчиками и с блоком контроля исполнения операций, блок сигнализации об операциях. цикла управления соединен с блоками контроля исполнения операций, управления операциями цикла и выбора адресов7 одноименных электролизеров каждой группы,схемы приводов питающих механизмов электролизеров каждой группы соединены с соответствующими адресным и операционным блоками, 5 оставитель А. Абросимовехред Н,Ковалева Кор Е. Лукач ктор Л, Алексеенко Тираж 7 ОНИИПИ Государственно по делам изобретений 113035, Москва, Ж - 35, РаО Поо комитета СССРи открытийушская наб., д. 45 каз 6052 писное илиал ППП Патент", г, Ужгород, ул. Проектн ю фФ ффЪ,1 ) фф692912 8Источники информации, принятые во внима.ние при экспертизе1, Минцис М. Я. Автоматическое регулирование алюминиевых электролиэеров, "Металлургия, 1971, с. 58.
СмотретьЗаявка
2518229, 25.08.1977
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И КОНСТРУКТОРСКИЙ ИНСТИТУТ "ЦВЕТМЕТАВТОМАТИКА"
ЗВЕНИГОРОДСКАЯ НАТАЛЬЯ СЕРГЕЕВНА, КЛИМОВИЦКИЙ АЛЕКСАНДР МОИСЕЕВИЧ, ЛЬВОВИЧ ВЕНИАМИН ЕФИМОВИЧ, МАНЬКОВСКАЯ ЛАРИСА ИОСИФОВНА, МЕЛИКЯНЦ РОБЕРТ ВАГАРШАКОВИЧ, РАБИНОВИЧ БОРИС ВЛАДИМИРОВИЧ, САЖИН СЕРГЕЙ БОРИСОВИЧ, ТАТИЕВСКИЙ ИЛЬЯ ЗУСЯЕВИЧ, ШИНДЕЛЬМАН АЛИСА РУДОЛЬФОВНА
МПК / Метки
МПК: C25C 3/20
Метки: алюминиевых, балочного, дистанционного, механизмами, питающими, типа, электролизеров
Опубликовано: 25.10.1979
Код ссылки
<a href="https://patents.su/4-692912-sistema-distancionnogo-upravleniya-pitayushhimi-mekhanizmami-balochnogo-tipa-alyuminievykh-ehlektrolizerov.html" target="_blank" rel="follow" title="База патентов СССР">Система дистанционного управления питающими механизмами балочного типа алюминиевых электролизеров</a>
Устройство формирования адресов для контроля блоков памяти

Номер патента: 1249587
Опубликовано: 07.08.1986
Авторы: Боголюбова, Веккер, Нейман, Плешев
МПК: G11C 29/00
Метки: адресов, блоков, памяти, формирования
...код первого адреса подмассиваМ для записи по нему информации, инверсной исходной. Далее блок 1 управления устанавливает на выходе 15сигнал "Считывание", а на управляющем входе коммутатора 4 - сигнал,разрешающий передачу на выходы 5 кода адреса, формируемого на выходахэлементов И группы 10.Далее устройство выполняет первый цикл Формирования адресных переходов, в котором осуществляются пере.ходы от каждого адреса подмассива к,первому адресу подмассива М, Дляэтого в каждом периоде обращения кблоку памяти блок 1 управления меняет уровень сигнала на управляющемвходе коммутатора 4, в соответствиис чем на выходы 5 через коммутатор 4поочередно поступают коды адресовподмассивов М и Б. По спаду сигналаблока управления, поступающегонасчетный...
Адаптивное телеметрическое устройство

Номер патента: 1492361
Опубликовано: 07.07.1989
Авторы: Игнатьев, Кишенский, Крекер, Решетников
МПК: G08C 19/28
Метки: адаптивное, телеметрическое
...48) навходы 27 и 28 второго блока 10 сравнения кодов поступают идентичные коды коэффициента группы, записанногопо первому адресу (следует различать"номер" коэффициента, определяющийего положение в общем массиве и коэффициентов и "адрес коэффициента, определяющий его положение в группе и;элементов). Блок 10 выдает сигнал вслучае, когда значение кода на входах 27 больше значения кода на входах 27, Таким образом, в первом такте блок 10 не выдаст сигнала и навтором такте будут сравниваться второй коэффициент (по входам 27) ипервый коэффициент (по входам 28),С каждым тактом работы счетчика 48адрес коэффициента на входах 27 увеличивается на единицу, а при отсутствии сигнала с выхода блока 10, адрес,записанный в регистре 11,...
Устройство для распознавания и учета предметов по типоразмеру

Номер патента: 1460731
Опубликовано: 23.02.1989
Авторы: Генкин, Ерош, Марукова
МПК: G06M 7/02
Метки: предметов, распознавания, типоразмеру, учета
...в ре гистр 51. Если блок сравнения 52 не вьдает сигнал "Больше", то в регистр 54 записывается содержимое счетчика 16. После того, как в определено, вычисляются величины А и В35В регистрах 49 и 51 записаны соответственно а и в . Блок 18 опре.деляет размеры А и В следующим образом. Подается синхросигнал С 1 на блоки 28 и 30 вычитания, получаются 40 ,соответственно значения аи в + +а+аЗатем, подавая сигнал С 2,на выходе блока 31 вычитания имеем значение в. Квадраторы 29, 32 и 34 дают на выходах соответственно значе ния а, в, а , в , которые суммируются соответственйо в сумматорах 35 и 36 по сигналу СЗ. На выходах блоков 37 и 38 имеем значения, Аи В Эти значения подаются на, элемент 39 50 сравнения блока 19, который, если выдает сигнал...
Устройство для контроля блоков памяти

Номер патента: 526954
Опубликовано: 30.08.1976
Авторы: Дорохин, Каминский, Карлов, Плешев, Савелов, Толчинский
МПК: G11C 29/00
...состояние в котором (начальный адрес) установлено программным блоком, В зависимости от команды, выдаваемой счетчиком адресных операций, и в соответствии с состоянием дешифратора, г свою очередь зависящего от состояния счетчика циклов( от порядкового номера цикла), блок формирования адресов осуществляет преобразование кода счетчика адресоз, обеспечивая необходимый порядок перебора ячеек объекта проверки (естественный, много 526954кратный, чсредование выбора ячеек с прямым и инверсным соотношением адресов и разрядов адреса и т. д.).Обращение к той или иной ячейке памяти в необходимом режиме (записи, считывания, считывания без регенерации и т, д.) осуществляется посредством сигналов, выдаваемых блоком 15 формирования сигналов у,...
Устройство формирования адресов для контроля блоков памяти

Номер патента: 665330
Опубликовано: 30.05.1979
Авторы: Андреев, Иванов, Коржев, Пресняков
МПК: G11C 29/00
Метки: адресов, блоков, памяти, формирования
...регистров-счетчиков в регистры адреса.Цель изобретения - повышение быстродействия устройства,Указанная цель достигается тем, что устройство содержит счетчик сравнения адресов, вход которого соединен с четвертым выходом блока программного управления, а выход - с третьим входом блока программного управления, второй и третий входы коммутатора соответственно подключены к вторым выходам счетчика текущего адреса и счетчика адреса теста проверки,аказ 1033/18 Изд.34 Тираж б 80 Подписное1 ПО Поиск Государственного комитета СССР по делам изобретений и открыгий 113035, Москва, Ж, Раушская наб., д, 4/5 пографня, пр. Сапунова, 2 На чертеже представлена структурная схема предлагаемого устройства.Устройство содержит счетчик 1 текущего адреса проверки...
Предыдущий патент: Способ оценки технологического состояния алюминиевого электролизера
Следующий патент: Электролит хромирования
Случайный патент: Способ получения препарата для умягчения воды