Устройство для трелевки и погрузки деревьев
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 691370
Автор: Журавлев




Текст
ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик ц)691370(51)М. Кд, В 65 О 67/04 с присоединением заявки Ю Ьеудирствеиный комитет СССР ао деием изобретений и открытий(53) УДК 621, ,864(088,8) Дата опубликования описания 17,10.79(72) Автор изобретенияИ. Н. Журавлев тный институтУ Кир вский научно-исследовательски лесной промышленности(71) Заявите 4) УСТРОЙСТВО ДЛЯ ТРЕЛЕВКИ И ПОГР ДЕРЕВЬЕВ зан с тросом трособлочной системы иоборудован роликами,На фиг. 1 изображено устройстводля трелевки и погрузки деревьев; на фиг.2 - вид А на фиг, 1; на фиг. 3 - разрезБ-Б на фиг. 2; на фиг. 4 -, схема запасовки каната; на фиг. 5 - вид В на фиг,2;на фиг. 6 - то же, вид сверху; нафиг. 7 - вид Г на фиг. 2.Устройство состоит из двух наклонныхрельсов 1, закрепленных на шасси, передние части рельсов шарнирно соединеныс основными и опираются на штоки гидроцилиндров 2. Гидроцилиндры обеспечивают подъем и опусканйе частей рельсовв широких пределах,ном положении час (приодачи масла в гидроцилин ) ы т ти В нейтральпрекращении иустанавливаютспродолжениемза счет пружилиндре 2.По рельсамс верхней челюс др ахват амки) перемешается тью 4 (форм Данное изобретение относится к уст-ройствам, осушествляюшим трелевку ипогрузку деревьев на транспортные средства, которые могут быть использованв лесной и деревообрабатываю;пей пролепно сти,Известно устройство для трелевки ипогрузки деревьев, содержашее самоходное шасси, несущее раму, на которой ус-.ановлена кабина управления, захват,выполненный с двумя поворотными посредством привода челюстями, и механизмперемещения захвата, включающий в себя лебедку и трособлочнуюсистему 11.. Недостаток известного устройствазаключается в его низкой эффективности.Целью данного изобретения являетсяповышение эффективности работы устройства.Достигается это тем, что на рамеустановлены йаправчяюшие для перемешения в них захвата, а блоки трособлочной,системы установлены по концам этих напвавляюших, при;:том захват жестко свяя так, что одна являетсдругой что достигается , помещенных в гидроци691370 зКонцы челюсти 4 шарнирно соединеныс ползунами 5, охватывающими рельс 1.Нижняя челюсть 6 поворачивается вовтулках 7, соединенных с ползунами 8,охватывающими полэуны 5 верхней челюсти,Связь челюстей осуществляется эасчет механизма 9,Механизм 9 состоитиэ постоянно замкнутой муфты сцепления10, рычажного звена 11 с роликом 12 1 Она конце, часть 13 рычажного звенателескопическая со спиральной пружиной,Поворот захвата осуществляется реечным механизмом 14.Шестерня 15 закреплена на валу челюсти 6. Рейка 16 входит в зацеплениес шестерней 15 и управляется гидроцилиндром 17, В челюсти 6 имеются две зубчатые рейки 18 для зацепления верхнейи нижней челюстей захвата. Звено 19 20служит для присоединения концов каната.Захват перемещается с помощью лебедки20, связь захвата с лебедкой канатная.Крутящий момент на лебедку 20 пе-,редается через муфту сцепления 21, Управление муфтой 21 электрическое. Вкорпусе муфты установлен электромагнитный тормоз. В машине предусматривается несколько электрических выключателей начала и конца ряда операций. Имеются упоры 22, 23 и 24. Пля устойчивости устройства в момент разгрузкипредусмотрен аутригер 25.Работает устройство следующим образом, Челюсти 4 и 6 в расцепленномсостоянии с помощью лебедки 20 двигаются дпя загрузки в направлениистрелки О, Ползуны 5 и 8 упираются в упоры 22, при этом нажимают наконечные выключатели - отключаетсямуфта 21 и сразу же затормаживаетсялебедка 20, одновременно включаетсягидрораспределитель и подается масло вмеханизм 14, Шток втягивается и рейка 16 механизма 14 входит в зацепление 45сшестерней 15,Поворачивается челюсть 6 и черезмеханизм 9 разворачивается челюсть 4,которая ложится на конец вала челюсти6 и удерживается в этом положении засчет муфты 10 и рычажного звена 11. Резкий разворот челюсти 6 отключает подачу масла в одну из полостей цилиндра 17.55Челюсть 6 развернулась, слегка касаясь грунта, и в этот момент осуществляется загрузка хлыстами (положение Х). 4Подача масла в другую полость цилиндра 17 (выполняет оператор) разворачивает челюсть 6 (вверх по окружности), Здесь наблюдается автономный поворот челюсти 6, Свободный поворот челюсти 6 обеспечивают упоры 23 и 24, 23 - на муфте 10, а 24 - на валу челюсти 6. За счет свободного хода зубчатые рейки 18 войдут в зацепление с боковыми частями челюсти 4, После этого замкнутый захват поворачивается как одно целое и займет положение и, Рейка 16 выходит из зацепления с шестерней 15, Включаем лебедку 20 на обратный ход, включением муфты 21 и отключением тормоза захват 3 перемещается вверх по рельсам (в направлении стрелки в). При дальнейшем движении захвата 3, ролики челюсти 6 скатываются с рельсов, ползун 5 доходит до конечного упора, а ползун 8 будет перемещаться. Боковые части челюсти 4 выйдут из зацепления с зубчатыми рейками 18 челюсти 6, которая двигаясь дальше, будет разгружать захват (положение 1 И ), В момент перехода захвата с грузом на подвижные концы рельсов можно при необходимости изменять высоту разгрузки. Разгруженный захват эа счет пружин, смонтированных в гидроцилиндры 2, перемешается так, что части рельсов устанавливаются на одной прямой. Во втулках 7 смонтированы пружинные демпферы, которые заставят челюсть 6 несколько развернуться в обратном направлении (после разгрузки), тогда за счет механизма 9 челюсть 4 поднимается до уровня рельсов,Включением лебедки 20 на обратный ход расцепленные челюсти захвата бу дут двигаться за следующей пачкой деревьев. Формула изобретения УстройствЬ дпя трелевки и погрузки деревьев, содержащее самоходное шасси, несущее раму, на которой установлена кабина управления, захват, выполненный с двуми поворотными посредством, привода челюстями, и механизм пермещения захвата. включающий в себя лебедку и трособлочную систему, о т л и ч а ю - щ е е с я тем, что, с целью повышения эффективности работы устройства, на раме установлены направляющие для перемещения в них захвата, а блоки трособлоч-.ной системы установлены по концам этихнаправляощих, при этом захват жестко .связан с тросом трособлочной системыи оборудован роликами,Источники информации принятые во внимание при экспертизе 1, Авторское свидетельство СССР Мо 455913, кл, В 66 Р 9/06, 1974,691370 игЗ г Составитель Л. Трофимчукевский: ТехредЛ. Алферова Корректо то Тираж 9 ИПИ Государственного по делам иэобретени 035, Москва, Ж,58 Подписноекомитета СССРй и открытийРаушская наб., д. 4/5 830/ Цка Филиал ППП Йатентф, г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
2467313, 29.03.1977
КИРОВСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНЫЙ ИНСТИТУТ ЛЕСНОЙ ПРОМЫШЛЕННОСТИ
ЖУРАВЛЕВ ИННОКЕНТИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: B65G 67/04
Метки: деревьев, погрузки, трелевки
Опубликовано: 15.10.1979
Код ссылки
<a href="https://patents.su/4-691370-ustrojjstvo-dlya-trelevki-i-pogruzki-derevev.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для трелевки и погрузки деревьев</a>
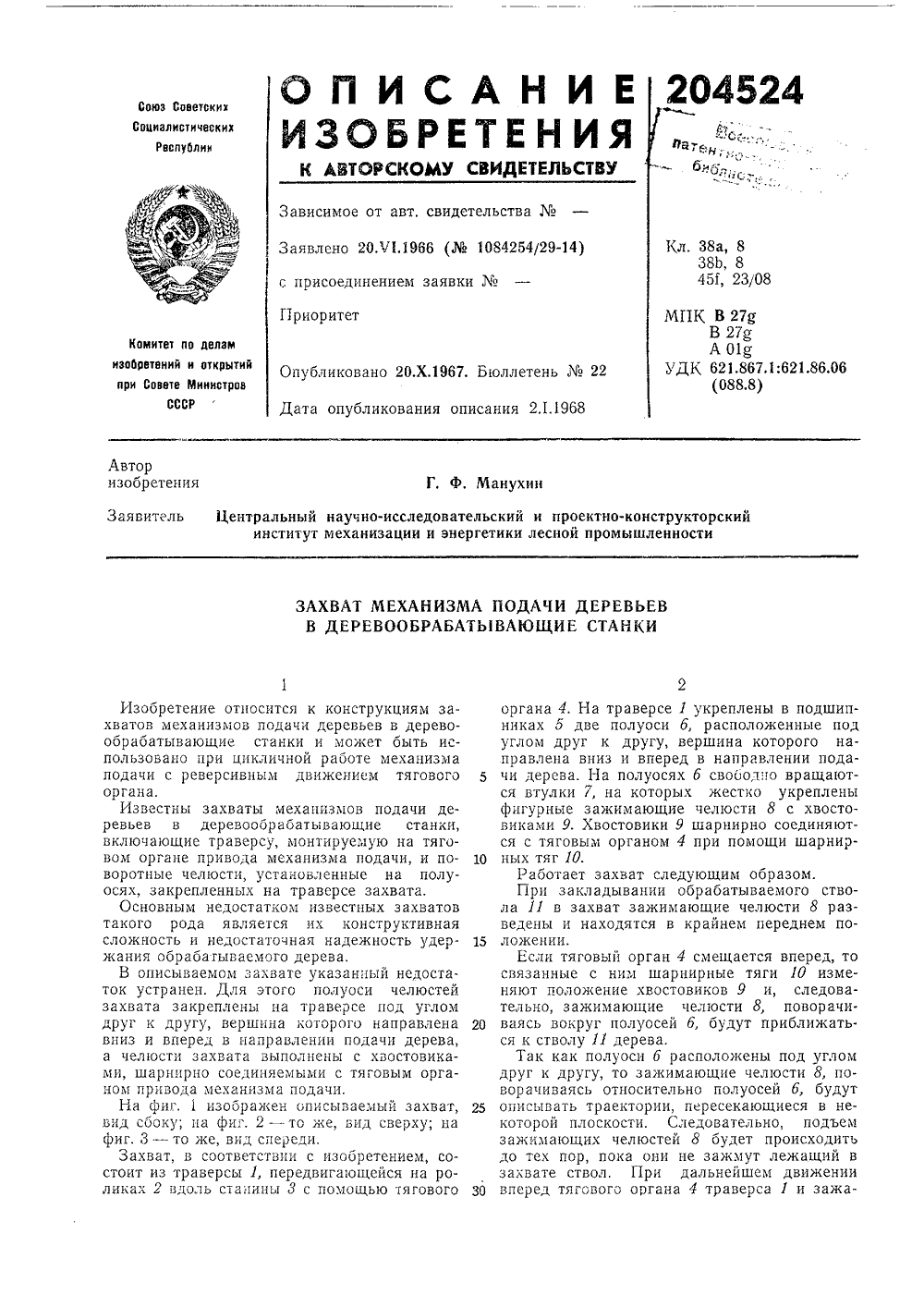
Захват механизма подачи деревьев в деревообрабатывающие станки
Номер патента: 204524
Опубликовано: 01.01.1967
Автор: Манухин
МПК: A01G 23/00, B27B 29/00
Метки: деревообрабатывающие, деревьев, захват, механизма, подачи, станки
...которых жестко укреплены фигурные зажимающие челюсти 8 с хвостовиками 9. Хвостовики 9 шарнирно соединяются с тяговым органом 4 при помощи шарнир 10 ных тяг 10.Работает захват следующим образом.При закладывании обрабатываемого ствла 1 в захват зажимающие челюсти 8 разведены и находятся в крайнем переднем по ложен ии.Если тяговый орган 4 смещается вперед, тосвязанные с ним шарнирные тяги 10 изменяют положение хвостовиков 9 и, следовательно, зажимающие челюсти 8, поворачи.20 ваясь вокруг полуосей б, будут приближаться к стволу 11 дерева.Так как полуоси б расположены под угломдруг к другу, то зажимающие челюсти 8, поворачиваясь относительно полуосей б, будут 25 описывать траектории, пересекающиеся в некоторой плоскости. Следовательно,...
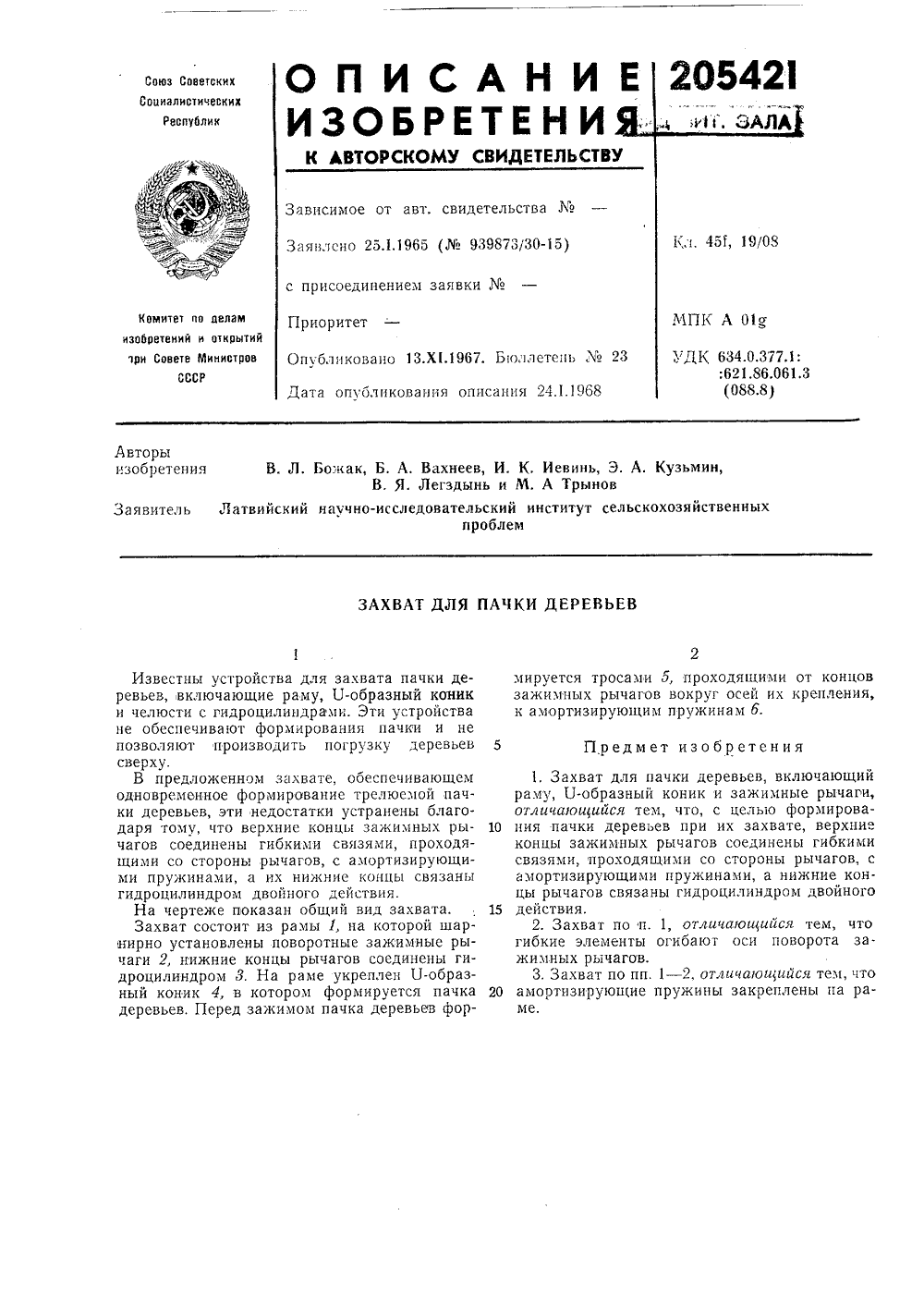
Захват для пачки деревьев
Номер патента: 205421
Опубликовано: 01.01.1967
Авторы: Вахнеев, Вожак, Иевинь, Кузьмин, Латвийский, Легздынь, Трынов
МПК: A01G 23/08, B60P 7/12, B66C 1/10, B66C 1/30, B66C 1/42, B66F 9/06
Метки: деревьев, захват, пачки
...деревьев, эти недостатки устранены благодаря тому, что верхние концы зажимных ры чагов соединены гибкими связями, проходящими со стороны рычагов, с амортизирующими пружинами, а их нижние концы связаны гидроцилиндром двойного действия.На чертеже показан общий вид захвата. 1 Захват состоит из рамы 1, на которой шарнирно установлены поворотные зажимные рычаги 2, нижние концы рычагов соединены гидроцилиндром 3, На раме укреплен Ц-образный коник 4, в котором формируется пачка 2 деревьев, Перед зажимом пачка деревьев формируется тросами 5, проходящими от концовзажимных рычагов вокруг осей их крепленияк амортизирующим пружинам б. 1, Захват для пачки деревьев, включающий раму, 13-образный коник и зажимные рычаги, отличаощийся тем, что, с целью...
Устройство для захвата и накопления деревьев при срезании их с корня

Номер патента: 578033
Опубликовано: 30.10.1977
Авторы: Вигант, Даболс, Розин, Рубулис, Эпалт
МПК: A01G 23/08
Метки: деревьев, захвата, корня, накопления, срезании
...челюсти 3 и 4, имеющие индивидуальный привод в виде силовых гидроцилпндров 5 и 6, штоки которых шарнирно соединены с захватными челюстями 3 и 4, а гпдроцилиндры - с рамой 1. К раме 1 жестко крепится приемник 7 для накопления срезанных деревьев 8.Захватные челюсти 3 и 4 выполнены в виде многозвенников, состоящих из отдельных шарнирно соединенных звеньев, удерживаемых в выпрямленном положении связующим элементом, например тросом 9 с пружиной 10. Конструкция звеньев многозвенника обеспечивает возможность поворота их вокруг шарниров относительно друг друга только в од 578033ном направлении. Гидроцилиндры 5 и 6 подключены посредством трубопроводов 11 к одной секции гидрораспределителя 12, причем штоковая полость гидроцилиндра 5...
Устройство для трелевки деревьев

Номер патента: 786945
Опубликовано: 15.12.1980
Авторы: Воронко, Жуков, Кирильчик, Рудницкий, Рыскин, Симанович, Смеян
...клещевом захвате, а отрезками канатов 16 и 17 при помощи гидроцилиндров 20 и 21 зажимают пакет в клещевом устройстве. Затеи тракторист поднимает щит 28 гидроцилиндром 29 и одновременно поднимает поворотную стрелу 4 гидроцилиндром 27. Канатом 3 лебедки 2, закрепленным на корпус 6 захвата 5, пакет подтаскивается к технологическому оборудованию, В полуподвешенном состоянии пакет транспортируется кместу разгрузки. На месте разгрузкитракторист первоначально растормаживает канат 3 лебедки 2, гидроцилиндром 15 разводит челюсти захвата 5, ипакет опускается на землю. Формула изобретения устройство для трелевки деревьев,содержащее самоходное шасси, на котором установлена лебедка с тяговымканатом и поворотная стрела, оборудованная захватом,...
Устройство для захвата и накопления деревьев при срезании их с корня

Номер патента: 869685
Опубликовано: 07.10.1981
Авторы: Балтайс, Вейдеман, Вигант, Розин, Рубулис, Эпалт
МПК: A01G 23/08
Метки: деревьев, захвата, корня, накопления, срезании
...табаритов по ширине,Это достигается тем, что челюсти гидроуправляемого захвата устанЬвлены с одной стороныприемника.На чертеже изображено предлагаемое устройство. Устройство содержит раму 1, на которой шарнирно крепятся захватные челюсти 2 и 3. К одному концу челюстей 2 и 3 шарнирно крепятся штоки цилиндров 4 и 5 соответственно, которые соосно установлены на раме 1, к раме 1 также крепится жестко приемник 6. Устройство работает следующим образом, При выдвижении штоков цилиндров 4 и 5 открываются челюсти 2 и 3. Устройство наво. дится на дерево до упора и втягиванием штока цилиндра 4 закрывается челюсть 2, прижимая и удерживая дерево 7. При срезании следующего дерева 8 устройство опять приемником 6 наводится до упора, работает цилиндр 5 и...
Предыдущий патент: Устройство для механизированной бесперевалочной выгрузки материалов из емкостей
Следующий патент: Устройство для управления погрузкой сыпучих материалов из бункеров в движущийся состав
Случайный патент: Способ исследования износа детали