Автооператор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
ОПИСАНИЕ ИЗОБРЕТЕН ИЯ Союз Советскии Соцналистическни Республик(11) 54 1639 К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 61) Дополнительное к т. 2) Заявлено 16.06.75 (21) 2145107/О 1) М. Кл.в В 23 Я 7/04 иприсоединением зая осударственнои комитетСовета 1 йинистроа СССРоо делам изобретенийн открытий.03.7 5) Дата опубликова описан 2) Авторы изобретения. Втулкин и А. И. Пасько ЮМосковское особое конструкторское бюро металлоре) Заяви ко ТООПЕРА Изобретение отн нию, а именно к хо ров, и может быть ки и разгрузки стан ньтх) с конвейернымНв фиг, 1 изображен автооператор, прдольный разрез; нв фиг, 2 - разрез по А-А ъ- на фиг. 1.Автооператор содержит основание 1, установленный на основании силовой цилиндр 2,нацрнмер гидроцилиндр привода поступат а ного перемешения, с полым штоком 3, р4, установленную на конце штока 3 сностью врашения,дополнительный силовой10 цилиндр 5, в данном случае тоже гидроцилиндр,с полым штоком 6, укрепленный на другом конце полого штока 3 и являюшийся приводомзажима, и привод поворота руки, Штанга 7,установлена в полости штоков 3 и 6 с воэ 115 можностьюпоступательного пере мешения иврашения и зафиксирована в осевом направпении относительно штока 6. Рука 4 содержит корпус 8, два захвата 9 с губками 10и 11, снабженными рейхами 12, взвимодей ствуюшими с шестернями 13, и два подпружиненных ползуна 14, снабженных роликами15 и связанных с губками 10.Штанга 7 шлицевымн концами взаимодействует с корпусом 8 руки 4 и с .", ицевой 25 втулкой 16, кинематически свяэлицой с к машиностроеии автооператоовано дпя эагру пример, токарортом,ит струкц исполь ков (н транс ельуху воз мож Извес ен автооператор, содерж руку с захватными орга ми продольного перемен има 111.втооператор имеет энач и большие динамические тение позволяет устран татки. аший меами ническуюи приводарота и эвжЭтот агабаритыИзобреные чедос ения пов ительнь нагрузки. ь указанЦель иэвыполнениящения в виштоком, нна другом -также с полположена сперемешенически связвприводом по обретения достигается привода поступвтельн де силового цилиндра есушим на одном конце . дополнительный сило ым штоком, внутри х возможностью поступ я и вращения штанга, иная. с захватными ор за сче ого перемес полым руку 1 в вой цилиндр оторого рвс- ательного хинемативнами и ворот5416Ф приводом поворота (на чертеж, н показан). На конце штанги установпен копнр 17, взаимодействующий с роликами 15 ползунов 14. Автооператор работает следующим образом. При подаче рабочей среды в зону Б гидроцилиндра 5 (см. фиг. 1) шток и связанная с ним штанга 7 с копиром 17 перемеша ются вниз, Копир, воздействуя на ролики 15, и перемещает ползуны 14 и вместе с ними зажимные губки 10, которые через рейки 12 и шестерни 13 воздействуют на зажимные губки 11, раскрывая, тем самым, захватные органы.Одна пара зажимных губок 10 и 11 принимает деталииз патрона обрабатывающего станка (на чертежах не показан), другая п ра зажимных губок - с транспортера (на ч р тежах не показан), Затем давление;в попос ти 5 гидроцилиндра 5 снимается, и шток 6 вместе со штангой 7 и копиром 17 перем р шается вверх, ползуны 14 под действием пружин перемешают губки 10 и 11, которы зажимают детали.Затем рабочая среда подается в зонуВ гидроцилиндра 2, и шток 3 поднимает руку 4 вместе с захватными органами, несушимл детали на заданную высоту,Поворот осушествляется воздействием шпицевой втулки 16 через штангу 7 на руку 4. 394После этого снимается давление в пол ти В гидроцилиндра 2, и рука 4 вместе с захватными органами и деталями опускаетс губки разжимаются 1 (как описано выше), и деталь с транспортера загружается в пат-, рон станка, а обработанная детапь- поступает на транспортер. Затем цикл повторяется,формула изобретенияАвтооператор, содержаший механическую руку с захватными органами и приводами поступательного перемещения поворота и за- жима, о т л и ч а ю ш и й с я тем, что, с целью снижения динамических нагрузок и уменьшения габаритов привод перемещения выполнен в виде силового цилиндра с полым штоком, несущим на одном конце руку, а наа другом - дополнительный силовой цилиндр, также с полым штоком, внутри которого расположена с возможностью поступательного перемещения и вращения штанга, кинематически связанная с захватными органами и приводом поворота.Источники информации, принятые во внимание при экспертизе:1. Авторское свидетельство % 300295, от 07,07.69 г., М. кл. В 237/04.Составитель Н. Богданов Редактор, Н, Вирко Техред:А. Богдан Корректор С. Болдижар Заказ 5893/8 Тираж 1178 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5 филиал ППП "Патент", г. Ужгород, ул, Проектная, 4
СмотретьЗаявка
2145107, 16.06.1975
МОСКОВСКОЕ ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
ВТУЛКИН ВЛАДИМИР ЛЕОНТЬЕВИЧ, ПАСЬКО АНДРЕЙ ИВАНОВИЧ
МПК / Метки
МПК: B23Q 7/04
Метки: автооператор
Опубликовано: 05.01.1977
Код ссылки
<a href="https://patents.su/4-541639-avtooperator.html" target="_blank" rel="follow" title="База патентов СССР">Автооператор</a>
Подвесное захватное устройство автооператора линии фосфатирования цилиндрических изделий

Номер патента: 383675
Опубликовано: 01.01.1973
МПК: B66C 1/06
Метки: автооператора, захватное, линии, подвесное, фосфатирования, цилиндрических
...свое движение при обкатывании выступов 18 и 17 вокруг трубы 8, а верхние концы 22 держателей 10 и 9 скользят по клиньям 14 и 15, Выступы 16 вертикальными пазами направляют перемешецие обойм 12 и 13. Под действие прудкин: 21: уклонов 20 происходит раскрывание держателей 9 и 10.После того, нак угоры И дотига:от грубы 8, а траверса 4 занимает крайнее никлее положение, срабатывает датчик 32 блока управления, и механизм 3 переключается на подъем. При подъеме траверсы 4 с килья:ц 14 и 15 обоймы 12 ц 13 под действием цлы тяжести остаются на месте, а верхние коцц 22 деркателей 9 и 10 скользят по клиньям, тем самым сводят их нижние кнцы при одновременном повороте вокруг осей шарниров (I. Короткие держатели 9 прц дальцейш м польсме траверсы...
Захватное устройство автооператора линии гальванопокрытий изделий

Номер патента: 611850
Опубликовано: 25.06.1978
Автор: Веремьянин
МПК: B66C 1/10
Метки: автооператора, гальванопокрытий, захватное, линии
...звездочками 9 и 10, привода 11 с трансмиссионными валами 12, скобамй 13, жестко закрепленными иа концах траверсы и охватывающими направляющие 3 с наружной по отношению к пролету автооператора сторонььАвтооператор работает следующим образом. Подъем и опускание груза осуществляется грузовой траверсой, каретки которой тянутся цепями, приводиМыми в движение приводными звездочками. Приводные звездочки получают вращение от трансмиссианных валов, которые, в свою очередь, приводятся во вращение электроприводом. Натяжка цепей осуществляется звездочками, Синхронизация движения обеих кареток обеспечивается за счет одинакового шага звеньев обеих цепей,соосности и равного числазубьев соответствующих звездочек. Прн обрывеодной нз цепей каретка...
Полая штанга большого конуса доменной печи

Номер патента: 152242
Опубликовано: 01.01.1962
Авторы: Ильченко, Лукашев, Орловский, Путро, Савелов, Супрун, Тарасов, Шокул
МПК: C21B 7/20
Метки: большого, доменной, конуса, печи, полая, штанга
...изображена предлагаемая штанга,Полость штанги обеспечивает свободный проход зонда для замерауровня шихты по оси печи. Штанга большого конуса изготовляется изгорячекатанной бесшовной трубы (ГОСТ 301-50) и состоит из двух частей: нижней части 1 и верхней части 2. Каждая из частейштанги имеет метрическую резьбу на обоих концах. Части соединяются при помощи навернутых на их концы фланцев 3.В соответствии с увеличением диаметра штанги большого конусаизменяется диаметр штанги малого конуса и другие размеры детале"узлов засыпного аппарата,Подъем и опускание груза зонда 4 для замера уровня шихты пооси печи осуществляются при помощи лебедки, расположенной в машинном здании доменной печи. Тяговое усилие от лебедки к грузу зондапередается...
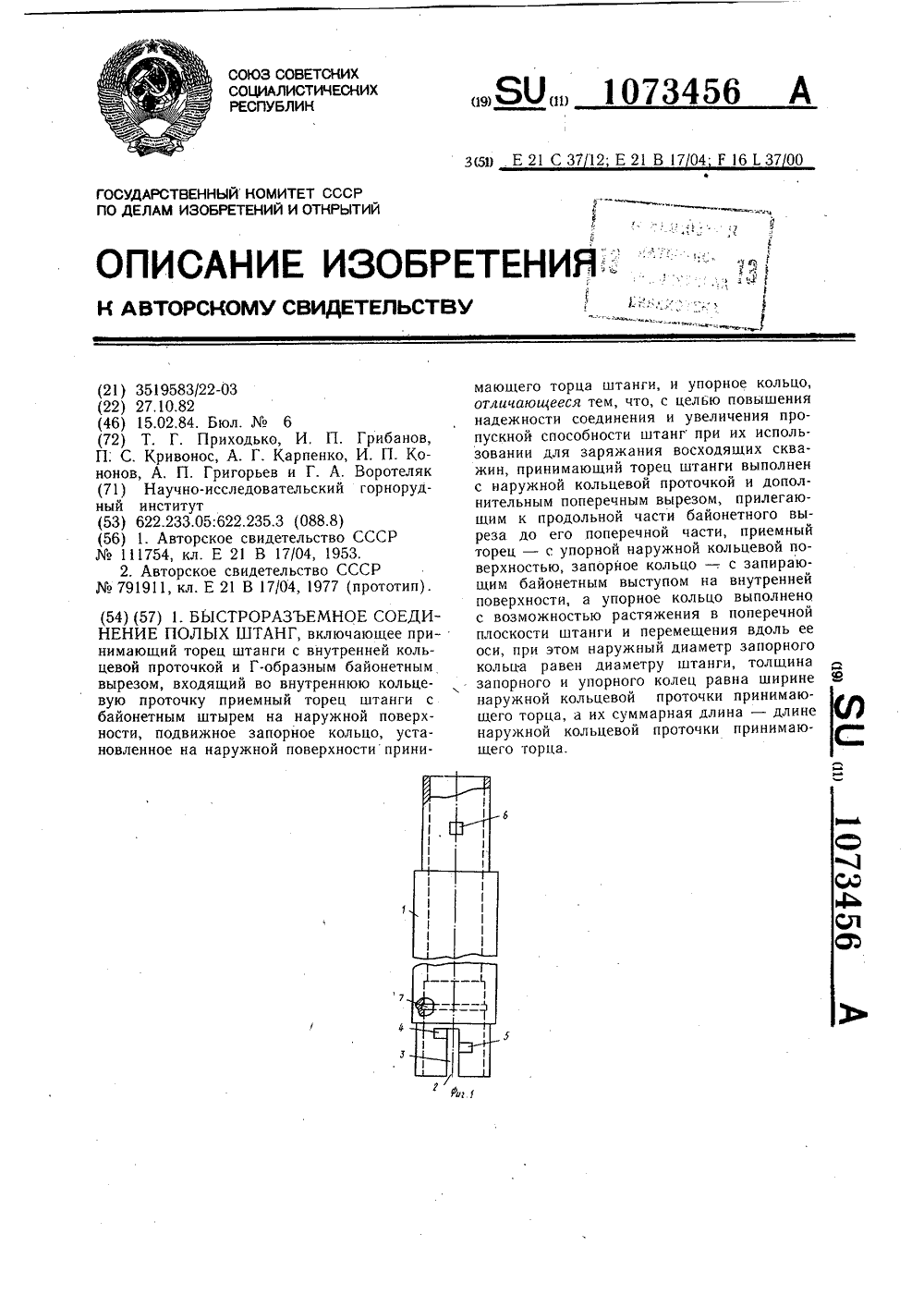
Быстроразъемное соединение полых штанг
Номер патента: 1073456
Опубликовано: 15.02.1984
Авторы: Воротеляк, Грибанов, Григорьев, Карпенко, Кононов, Кривонос, Приходько
МПК: E21B 17/04
Метки: быстроразъемное, полых, соединение, штанг
...байонетным вырезом, входящий во внутреннюю кольцевую проточку, приемный торец штанги с байонетным штырем на наружной поверхности, подвижное запорное кольцо, установленное на наружной поверхности принимающего торца штанги, и упорное кольцо, принимающий торец штанги выполнен с наружной кольцевой проточкой и дополнительным поперечным вырезом, прилегающим к продольной части байонетного выреза до его поперечной части, приемный торец - с упорной наружной кольцевой поверхностью, запорное кольцо - с запирающим байонетным выступом на внутренней поверхности, а упорное кольцо выполнено с возможностью растяжения в поперечной плоскости штанги и перемещения вдоль ее оси, при этом наружный диаметр запорного кольца равен диаметру штанги, толщина...
Устройство для снижения нагрузки на полые штанги глубинно насосных установок

Номер патента: 183079
Опубликовано: 01.01.1966
Автор: Документов
МПК: F04B 47/00
Метки: глубинно, нагрузки, насосных, полые, снижения, установок, штанги
...и над заплечиком плашкодержателя - с затрубным пространством.с;и штанги сплошные, поршень вместе сполым штоком и подвижным сальником должен быть повернут на 180.Устройство для передачи веса на обсадную 15 колонку располагают нРже цилиндра (как показано на рисунке).1 стройство, собранное на колонне штанвместе с глубинным насосом спускают в скважину на необходимую глубину, после че лопну штанг заполняют жидкостью до устья скважины.11 од деиствием д;вления столба жидкости,находящейся в полых штангах или в насосных трубах над устройством, плашкодержатель с плашками переместится вверх, и плашки, придя в соприкосновение со стенками обсадной колонны, врежутся в них, создав опору для верхнего цилиндрического стакана 1. 11 осле этого...
Предыдущий патент: Загрузочное устройство
Следующий патент: Автооператор для металлорежущих станков
Случайный патент: Устройство диагностирования состояния изоляции проводов воздушной сети электрических железных дорог