Преобразователь аналоговых сигналов в угол поворота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
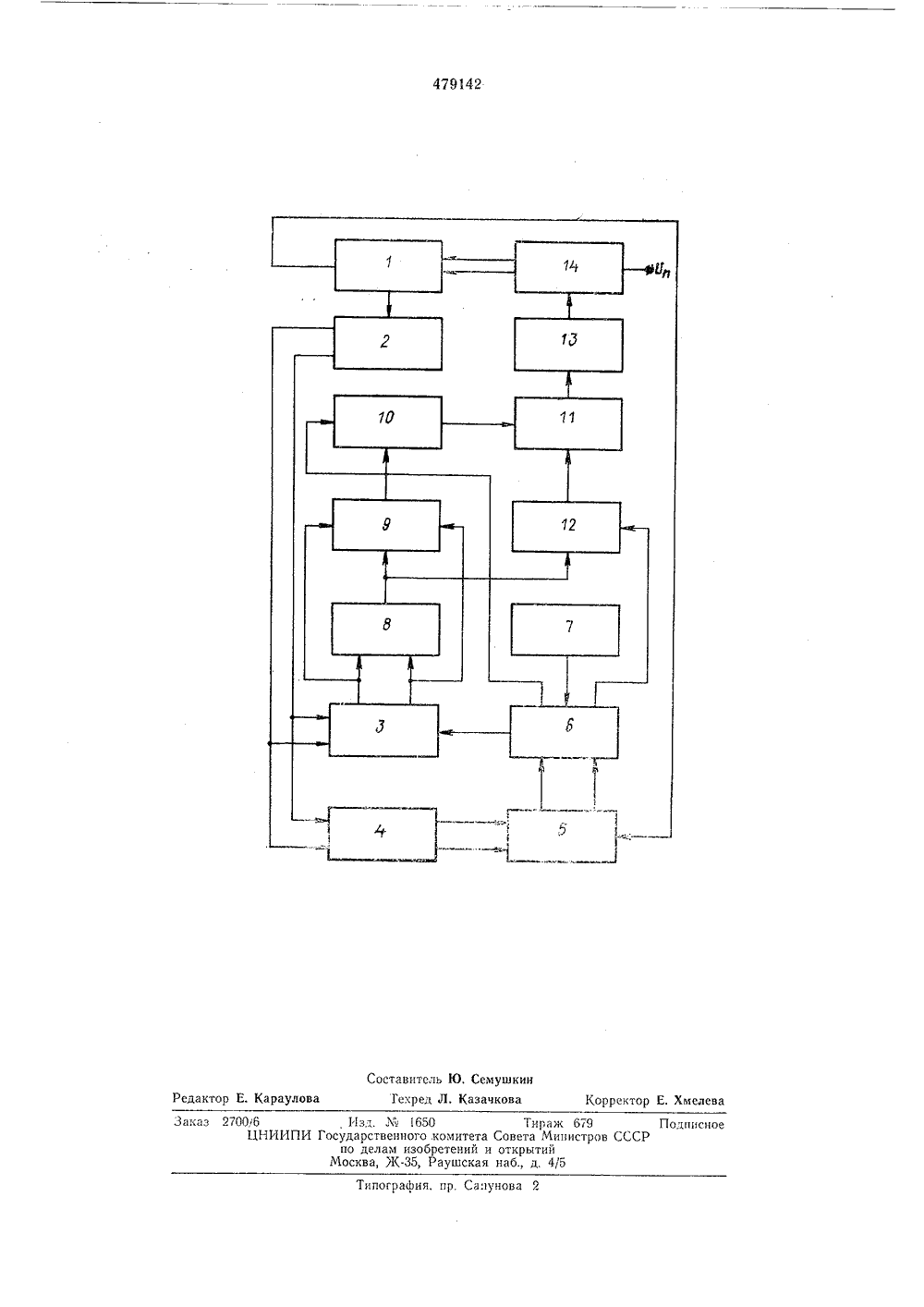
ОПИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ пц 47942 Союз Соеетскик Социалистических Республик(22) Заявлено 02.01.74 (21) 1982256/18-2 1) М. Кл. б 08 с 19/3 присоединени заявкиГосударственный коми 23) Приоритет публиковано 30,07.75. Бюллетень28 овета Министров ССпо делам изооретеиии открытий 3) УДК 62-50 исания 03.10.7 та опубликования(71) Заявител 4) ПРЕОБРАЗОВАТЕЛЬ АНАЛОГОВЪХ СИГНА В УГОЛ ПОВОРОТАИзобретение относится к автоматике и вычислительной технике и может применяться в системах преобразования информации.Известны преобразователи аналоговых сигналов в угол поворота, содержащие измерительный блок, шаговый электродвигатель и электронную часть, состоящую из компаратора, генератора, блока переключения и блока управления, состоящего, в свою очередь, из реверсивного распределителя импульсов, блока согласования и блока усилителей.Цель изобретения - повышение к,п.д., точнасти и устойчивости работы преобразователя.Это достигается тем, что в преобразователь дополнительно введены коммутатор направления, коммутаторы поочередной и парной коммутаций, фиксатор алгоритмов, селектор алгоритмов и дискриминатор алгоритмов, причем первый и второй входы последнего подключены соответственно к первому и второму выходам компаратора, первый, второй и третий входы селектора алгоритмов соединены соответственно с первым и вторым выходами дискриминатора алгоритмов и с другим выходом измерительного блока, первый и второй выходы селектора алгоритмов - соответственно с первым и вторым входами фиксатора алгоритмов, к третьему входу которого подключен генератор импульсов, а первый, второй и третий выходы фиксатора алгоритмов соединены соответственно с первыми входами коммугаторов поочередной и парной коммутаций и третьим входом блока переключения, первый и второй выходы которого подключены соот ветственно к первому и второму входам коммутатора направления, выход реверсивного распределителя импульсов соединен с третьим входом коммутатора направления и с вторым входом коммутатора парной коммутации, вы ход коммутатора направления подключен квторому входу коммутатора поочередной коммутации, выходы коммутаторов поочередной и парной коммутаций соединены соответственно с первым и вторым входами блока согла сования.На чертеже представлена структурная схема предлагаемого преобразователя.Преобразователь работает следующим образом.20 Если при включении преобразователь находится в несогласованном состоянии, т. е. на первом выходе измерительного блока 1 имеется сигнал рассогласования, превышающий по величине зону нечувствительности компарато ра 2, то на одном из его выходов в зависимости от знака рассогласования появляется потенциальный сигнал, который по первым или вторым входам управляет блоком переключения 3 и дискриминатором алгоритмов 4, по- ЗО следний на первом выходе формирует потенциальный сигнал на включение алгоритма парной коммутации. Этот сигнал по первому входу поступает па селектор алгоритмов 5, который разрешает, прохождение потенциального сигнала с первого выхода на первый вход фиксатора алгоритмов 6 в случае отсутствия сигнала аварии на втором выходе измерительного блока 1. Наличие сигнала на первом Вхо де фиксатора алгоритмов 6 обеспечивает прохождение импульсов управления от генератора 7 на третий вход блока переключения 3 и далее на его выходы в зависимости от нали- чия сигнала соответственно на его входах. С выходов блока переключения 3 импульсы поступают на соответствующие входы реверсивного распределителя импульсов 8 и одновременно на соответствующий вход коммутатора направления 9, который определяет текущее направление отработки рассогласования на основе информациипоступающей на входы реверсивного распределителя импульсов 8 и переключает своим выходом коммутатор поочередной коммутации 10 в состояние, которое определяется этой информацией и состоянием реверсивного распределителя импульсов 8. При наличии сигнала на выходах компаратора 2 на первом выходе фиксатора алгоритмов 6 сигнал отсутствует и, следовательно, отсутствует сигнал на входе коммутатора поочередной коммутации 10, что соответствует размыканню его по выходу с первым входом блока согласования 11, на второй вход которого в этом случае поступают управляющие сигналы с выхода коммутатора 12 парной коммутации, включение последнего по первому входу произведено сигналом с второго выхода фиксатора алгоритма 6. С выхода блока согласования 11 сигналы, соответствующие алгоритму парной коммутации, поступают на вход блока усилителей 13, которые осуществляют коммутацию обмоток управления электродвигателя 14 в последовательности, обеспечивающей отработку сигнала рассогласования по кратчайшему пути в пределах синхронизации измерительного олока до величины, не превышающей зону чувствительности компаратора 2. В режиме отработки рассогласования потребление электродвигателя 14 по шине питания не превосходит 0,6 РмаксНа такую мощность и должен быть рассчитан источник питания электродвигателя 14,Вход преобразователя в зону нечувствительности приводит к исчезновению сигнала на любом из выходов компаратора 2, что прекращает прохождение импульсов от генератора 7 через фиксатор алгоритма 6 и блок переключения 3 на входы реверсивного распределителя импульсов 8. Снятие управляющих сигналов с обоих входов дискриминатора алгоритма 4 приводит к появлению на его втором выходе сигнала на включение алгоритма,поочередной коммутации. Этот сигнал по второму входу поступает на селектор алгоритмов 5, который разрешает прохождение сигнала с второго выхода на второй вход фиксатора алго 10 15 40 45 50 60 б 5 ции на парную вызывает смещение вала элек 25 30 35 ритмов 6 в случае отсутствия сигнала аварии на втором выходе измерительного блока 1. Наличие сигнала на втором входе фиксатора алгоритма 6,приводит к появлению управляющего сигнала на его выходе, который связан с первым входом коммутатора поочередной коммутации 10, последний через свой выход подключается к первому входу блока согласования 11 и далее к входу блока усилителей 13, которые отключают одну из двух включенных на предыдущем шаге обмоток управления электродвигателя 14, в результате чего его вал поворачивается на половину шагового интер вала в направлении, задаваемом коммутато ром направления 9. Коммутация обмоток электродвигателя 14 прекращается, его вал и подвижная часть измерительного блока 1 фиксируются, преобразователь устанавливается в состояние устойчивого равновесия, которому соответствует алгоритм поочереднои коммутации обмоток управления электродвигателя 14. В этом состоянии потребление по шине питания составляет 0,5 Р.,. Таким образом, исключается в преобразователе режим фиксированной стоянки электродвигателя под током при алгоритме парной коммутации, когда его потребление по шине питания составляет Р,и(. Одновременно с этим повышается не менее, чем в два раза, позиционная точность преобразователя за счет того, что после прохождения валом электродвигателя 14 положения, которое соответствует границе зоны нечувствительности компаратора 2, вал электродвигателя 14 смещается на полшага внутри зоны нечувствительности, оптимальная величина которой из условия устойчивости выбирается обычно равной 3/4 шагового перемещения при парной коммутации обмоток. Что касается устойчивости релейной системы автоматического управления, какой является предлагаемый пре образователь, то такой прием позволяет се увеличить, поскольку переход с алгоритма парной коммутации на поочередно ю при входе в зону нечувствительности эквивалентен уменьшению ее комплексного коэффициента усиления в два раза. С точки зрения теории управления реализацию такого алгоритма функционирования преобразователя при входе в зону нечувствительности компаратора 2 можно рассматривать как цифровую коррекцию нелинейной системы автоматического управления.Предлагаемое построение преобразователя обеспечивает коррекцию движения вала электродвигателя 14 и при выходе системы пз зоны нечувствительности компаратора 2. В этом случае при появлении на выходе измерительного блока 1 сигнала рассогласования, превышающего зону нечувствительности компаратора 2, производится перевод электродвигателя 14 на алгоритм парной коммутации, В случае, когда направление движения, предшествовавшее входу в зону нечувствительности, сохраняется и при выходе из нее, переход электродвигателя с алгоритма поочередной коммутатродвигателя 14 на полшага в сторону отработки рассогласования; это обеспечивается за счет того, что появление сигнала на первом цли втором входе дискриминатора алгоритмов 4 вызывает появление управляющего сигнала ца его первом выходе, поступающего по первому входу на селектор алгоритмов 5, первый выход которого подготавливает срабатывание фиксатора алгоритма 6 при поступлении на его третий вход очередного управляющего импульса с генератора 7. Приход этого импульса переключает реверсивный распределитель импульсов 8 и устанавливает фиксатор алгоритмов 6 в состояние, при котором на его втором выходе появляется сигнал, разрешающий по первому входу работу коммутатора 12 парной коммутации, который через блок согласования 11 и блок усилителей 13 включает еще одну обмотку управления электродвигателя 14, В результате этого его вал смещается на полшага в сторону отработки рассогласования.Лтталогичным образом происходит взаимодействие узлов преобразователя и в том случае, когда направление движения при выходе из зоны нечувствительности противополокцо направлению движения при входе в цее, т. е. когда производится преобразование знакопеременного входного сигнала. Особенностью работы электродвигателя 14 в этом случае является то, что его вал прц выходе из зоны нечувствительности компаратора 2 поворачивается при первом пришедшем импульсе с генератора 7 ца третий вход фиксатора ал. горитмов 6 на полтора шага в направлении отработки рассогласозация, В обоих рассмотренных случаях выхода из зоны первый импульс с генератора 7 служит для устацовк фиксатора алгоритмов 6 в состояцтте, соответствующее алгоритму парной коммутации. Этот импульс, пройдя ца третий вход блока переключения 3, в зависимости от наличия сигнала ца первом или втором его входах проходит с Одного из выходов блока переключения 3 ца соогветствуюцтий вход реверсивного распределителя импульсов 8, устанавливает его в состояние, соответствующее смещению вала электродвигателя 14 ца шаг от того положения, которое оы этот вал занимал в состоянии устойчивого равновесия прц неизменном алгоритме управления, соответст вующем парной коммутации обмоток, Это дает возможность изменять величину первого перемен;ения вала электродвигателя 14 при входе и выходе из зсшы нечувствительности за счет автомагичсского переключения алгоритмов управления электродзигателя 14 по сигналам дттскрцмицатора алгоритмов 4, селектора алгоритмов 5, фиксатора алгоритмов 6, коммутатора направления 9 и коммутаторов 10 и 12 относительно положения, которос в известных устройствах определяется только состоянием реверсивного распределителя импульсов 8. Такой характер движения вала способ твует увеличению точ ности и устойчивости усгройства при преобразовании знакоттеремецных периодических сигналов.При появлении на втором выходе измерительного устройства 1 сигнала аварии через третий вход производится отключение селектора алгоритмов 5, который через фиксатор алгоритмов 6 одновременно отключает коммутаторы 10 и 12, что ведет к откчючецию блока согласования 11 и блока усилителей 13. В этом "лучае электродвигатель 14 автсматически отключается от шины питания. 5 10 15 Преобразователь аналоговых. сигналов в угол поворота, содержащий блок согласования, выход которого чеоез блок усилителей подключается к обмоткам управления шагового электродвигателя, вал которого механически соединен с подвижной частью измерительного блока, выходом соединенного с входом компаратора, блок переключения, первый и второй Вхсль котороО полклюсны соответ. ственцо к первому и второму выходам компаратора, первый и второй выходы блока переключения соединены соответственно с первым и,вторым входами реверсивного распределителя импульсов, и генератор импульсов, отл ич а ю щ и й с я тем, что, с целью повышения к.п,л., точности и устойчивости работы преобразователя, оц содержит коммутатор направления, коммутаторы поочередной и парной коммутаций, фиксатор алгоритмов, селектор алгоритмов и дискриминатор алгоритмов, первый ц второй входы когорого подключены со. ответственно к первому н второму выходам компаратора, первый, второй и третий входы селектора алгоритмов соединены соответственно с первым и вторым выходами лискрп. минатора алгоритмов и с другим выходом измерительного блока, первый и второй выходы селектора ал Орцтмов соелттцецы состветствец. цо с первым и вторым входами фиксатора алгоритмов, к третьему входу которого толклО- чец генератор импульсов, а первый, второй ц третий выходы фиксатора алгоритмов соединены соответственно с псрвымц входамц коммутаторов поочередной и парной коммутаций и третьим входом блока переключения, первый и второй выходы которого подключены, соответственно к первому и второмх входам коммутатора направления, вхол рсверсцвцо;О расттределителт импульсов соелццсц с третьим вхолом комтутатора направленияс втОртт,ч входом коммутатора парной коммутации, выход коммутатора направления подключен к второму входу коммутатора поочередной коммутации, выходы коммутаторов поочерелной и парной коммутаций соединены соответственно с первым и вторым входами блока согласования,20 25 30 35 40 45 50 55 60 Предмет цзооретенияТипография, пр. Сапунова 2 Заказ 27006 Изд Ъо 1650 ЦНИИПИ Государственного, комитета по делам изобретений и Москва, )К, Раушская
СмотретьЗаявка
1982256, 02.01.1974
ПРЕДПРИЯТИЕ ПЯ Г-4421
СМИРНОВ ЮРИЙ СЕРГЕЕВИЧ, ЧУМАКОВ АЛЕКСАНДР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G08C 19/38
Метки: аналоговых, поворота, сигналов, угол
Опубликовано: 30.07.1975
Код ссылки
<a href="https://patents.su/4-479142-preobrazovatel-analogovykh-signalov-v-ugol-povorota.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь аналоговых сигналов в угол поворота</a>
Устройство для контроля и коммутации резервных блоков

Номер патента: 1252782
Опубликовано: 23.08.1986
Авторы: Курочкин, Лещенко, Смирнов
МПК: G06F 11/10, H05K 10/00
Метки: блоков, коммутации, резервных
...сигнала ца выходе 13 блока и дальнейшие переключения сч.тчикон блокируются.Рассмотрим работу блока 7 управления. В исходном состоянии сигналом цдчдльцой установки триггер 36 устанавливается в состояние 1 , в результате разблокируется элемент И 34 и разрешается выдача стробов С цд выход 14 блока управления. Элемент И 38 блокирован цулевнм сигндлом с инверсного выхода триггерд 36. Нд фиг.4 показано распределение фронтов и периодов следования импульсов С и С 2, Длительность импульсов С выбирается достаточной дпя завершения переходных процессов в блоках 1 - 3 и элементах формирования контрольных сигналов длительность строба С 2 - достаточной для переключения коммутаторов и выработки контрольных сигналов, Интервал , выбирается достаточным для...
Устройство для контроля микропроцессорной системы

Номер патента: 1120336
Опубликовано: 23.10.1984
Авторы: Казимов, Лисенков, Петрухин, Солдатенков, Шалягин
МПК: G06F 11/20
Метки: микропроцессорной, системы
...и четвертый элементы ИЛИ, первый и Зб 2 второй элементы И, счетный триггер,элемент НЕ, причем первые входы спервого по третий элементов ИЛИ соединены с выходами соответствующихкомпараторов блока сравнения, вторыевходы с первого по третий элементовИЛИ соединены с выходом первого элемента И, а выходы - со обросовымивходами соответствующих 3 -триггеровзапросов, тактовые входы которых соединены с выходом формирователя импульсов, информационные входы3-триггеров запросов соединены сшиной единичного потенциала, а выходы - с соответствующими входами четвертого элемента ИЛИ и с соответствующими информационными входамиблока коммутации, выход четвертогоэлемента ИЛИ соединен со счетным входом счетного триггера и первым входом второго элемента И,...
Устройство для кодирования звуковых сигналов

Номер патента: 651473
Опубликовано: 05.03.1979
МПК: H03K 13/00
Метки: звуковых, кодирования, сигналов
...+1 илив зависимости от полярности входного сигнала. Таким образом, этот каскад формирует однополярный сигнал с одновременной выдачей информации о его первоначальной полярности, что дополнительно сужает динамический диапазон биполярного входного сигнала в два раза. Процесс преобразования разбивается на два цикла. В течение первого цикла определяется знак сигнала и номер участка динамического диапазона, в который попадает входной сигнал, и в соответствии с этим изменяется коэффициент передачи второго усилителя 2, а во втором цикле производится кодирование значения сигнала. В первом цикле усилитель 1 вырабатывает бит знака сигнала, поступающий на формирователь кода 6, и формирует однополярный сигнал, который через блок коммутации 7,...
Устройство для записи-воспроизведения цифровой информации на видеомагнитофоне

Номер патента: 1157568
Опубликовано: 23.05.1985
Авторы: Беляков, Смирнов, Тучин, Шелестов
МПК: G11B 5/09
Метки: видеомагнитофоне, записи-воспроизведения, информации, цифровой
...первого и второго генераторов синхросигнала, первый и второй коммутаторы, первый и второй делители частоты, регулируемый элемент задержки, счетчик импульсов и блок стробирования, причем первый коммутатор подключен входами к второй входной шине, к первому выходу первого генератора синхросигнала и к соединенным между собой входу счетчика импульсов, выходу блока стробирования и синхронизирующему входу декодера, а выходами - к синхронизирующим входам первого и второго запоминающих устройств, блок стробирования подключен входами к выходу первого делителя частоты, к выходу счетчика импульсов, к второму выходу первого генератора синхросигнала и через регулируемый элемент задержки - к второму выходу блока разделения, второй коммутатор...
Каротажный графопостроитель

Номер патента: 1170394
Опубликовано: 30.07.1985
Автор: Антоненко
МПК: G01V 1/24
Метки: графопостроитель, каротажный
...5 и через блок 3 памяти - с входом второго компаратора 6, выходгенератора,2 пилообразного напряжения соединен с вторыми входами компараторов 5 и 6, прямые и инверсныевыходы компараторов 5 и 6 соединены ЗОс схемами И 7 и 8, выходы которыхчерез схему ИЛИ 9 и усилитель-формирователь 10 соединены срегистрирующим устройством 11, а выход схемы ИЛИ 9 через формирователь 4 соединен с тактовым входом узла 3 памяти. Регистрирующее устройство 11соединено с управляющим входом генератора 2 пилообразного напряжения.В качестве регистрирующего устройства может быть использована любаясистема: с электронно-лучевой трубкой (ЭЛТ), с механической разверткой точки записи вдоль строки (апнараты с вращающейся спиралью), с45электронной разверткой точки...
Предыдущий патент: Устройство для сбора информации
Следующий патент: Устройство для автоматической проверки преобразователей угол-код
Случайный патент: Устройство для электрообработки газового потока