Система идентификации параметров
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1837260
Автор: Лащев
Текст
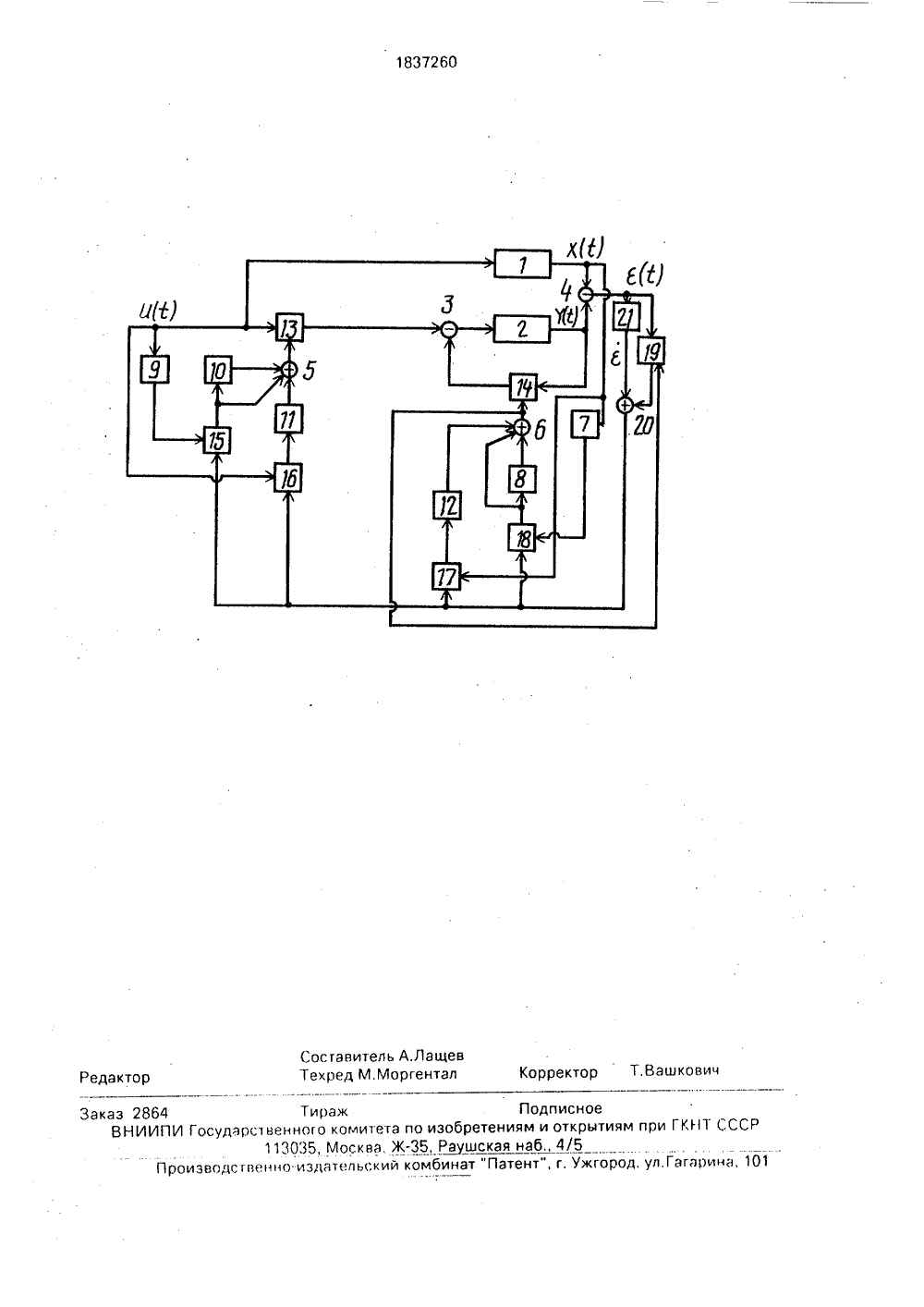
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 18372 Г 9) 1)5 0 05 В 23/02 г ков В.В. Самоуправления с к, "Наука и техИ ПАРАобласти автом идентификарного объекта зволяет повыгде у(т) - выхонастраиваемые к метры,Пусть модели, аф), ао(С) туром адаптации па аУаФ)+ ЬаФ)ао(т)+ Ьао(1)Ь(с)+ ЬЬ(т),и (2) запиш 1(1) = Ь.,матики, а именно к система1 ции параметров нестациона.управления. Изобретение по Изобретение относится к области сис:тем адаптивного управления, а именно ксистемам идентификации параметров су, щественно нестационарного объекта управ,ления,Целью изобретения является повыше, ние быстродействия, запаса устойчивости ирасширение области применения.Рассмотрим метод синтеза алгоритмов, .адаптации параметров в системе идентификациии параметров нестационарного объек:та управления второго порядка(1) х=ах+аоо(с)х+Ьо(т)ц,где а 1(с), ао(с), Ь(т) - переменные во времени параметры,х(с), ф) - выход и вход объекта управле: ния соответственно.Выберем модель объекта с настраивае, мыми параметрами(2) у=а ф)у+а(с)у+ Ь(с)ц,ЕТЕНИЯг, -1") г сить быстродействие системы за счет введения дифференциальных составляющих в алгоритм адаптации параметров, что повышает скорость убывания функции Ляпунова, запас устойчивости системы и улучшает качество переходных процессов, процедур адаптации параметров, при этом нет требования квазистационарности к параметрам объекта и не требуется решения матричного уравнения Ляпунова, что становится невозможным при значительных диапазонах и скоростях изменения параметров объекта особенно при больших степенях дифференциального уравнения, описывающего состояние обьекта. 1 ил.=а 1(т) е+аф) я+ Ьа 9)х+ Ьа Выберем функцию Ля Ч=0,5 7,де значение у (1) опредеЧ= Ч 7 (7) где значение 7 (с) определим иэ (6) в виде7 (с)=Л аг(с)х+ Ла 1(с)х+ Лас)(с)х+ +Ла,"(с)х+ ЛЬ"(с)ц+ Аэ (с)ц (8) где индекс "Н" означает требуемые алгоритмы и изменения параметров,Иэ (7) и (8) можно записать, опустив в записи тЧ= 7 Л аг "х+Лаг "х+Ла 0"х+:Для того, чтобы ЧО, потребуемЛзг 7 х О, Ла 1 ЧхО,Ла 0"7 х О, Ла 0" 7 хО, ЛЬ"7 цО, ЛЬ" 7 ц О, (10) и выберем значения параметрических приращений из (10)Ла 1"=- - ЛЧх, Лаг" = -Л ЧхЙ"=- -Л 7 х, Л а 0" = - Л 7 х Л, = сопзс0 (11) АЬ"=- Л 7 ц, ЛЬ"=-Л Чц, Если теперь к (7) прибавить выражениес ( Лаг" 3 Ла 1 "й+ Лао" 3 Л аой+ +Л Ь" Х Л Ь" й)-( Лаг" Х Л а 1 й+Ьао",Г л . ало + Ьь), Л о"о 1) (1,2) и учесть, что выполняются неравенстваЛа 1" ; Л асс О, ао" 3; Л ао"й о, оь")ло"а 1 о, з)го то из (7) с учетом (12) дополнительно к (10) можно записать Лаг" Х, Л аг"й+ Л Л а 1"7 х=О,Ла 0"Л а 0" й+ Л Л ао" 7 х =О, (14)ЛЬ" 3, Л Ь"й+ ЛЛ Ь"С 7 ц=О а дополнительно к (1) из (14) запишем3Лаг"й=-Л 7 х,го гЛао"й=-Л 7 х, (15) гЛЬ"й:=-Л 7 ц.соИэ(11) и (15) окончательно можно записать алгоритмы адаптации параметров мо- дели(1 9) Ь(р)-Ь(р),=р.- = ЛЬ(р), (2 З) 50 Если учесть, чтоЛ Ь(с)-Ь(с) Ь(с ), (24)то при замыкании отрицательной обратнойсвязи по параметру Ь(с) получим значениеЛ Ьз(с)55 ло) ).яВ.) )ьгй)Р1 +Л О рР +Л ОСистема идентификации параметровнестационарного объекта управления представлена на чертеже, где приняты следуюо Яц)15при этом значение производной функцииЛяпунова будет видач - - ЛЧх)+(Чх)2+( Ъ)+( чх)2 (та)2+ 20 с(17),25 что обеспечит устойчивость процедур адаптации параметров модели к изменяющимсяпараметрам объекта управления. Реальнотребуемые значения не могут быть обеспечены, Действительно использование пара метрической отрицательной обратной связисопровождается статической и динамической ошибкой, Покажем это на примере одного изменяемого параметра Ь(с) 35 ЛЬ(с)=(е-ас е -а 0 я )/ц=7 с0, (18)а из (3)запишемЬ(с)=Ь(с)+ ЛЬ(с)где Ь(с) имеем видЬ(с)=Ь(т 0)- ЛЬн(с), тс, (20)Для частного случаягй"(с- Л т 7 ц (21)запишем (21), выразив ЛЬ"(с) через текущеепараметрическое отклонение ЛЬ(с) 45 ЛЬ (с) Лц ЛЬ(с) (22)с учетом (22) из (19) получим в операторнойформещие обозначения: объект 1 управления,блок 2 интегрирования, блоки 3,4 сравнения, сумматоры 5,6. блоки 7,8,9 и 10 дифференцирования, блоки 11, 12интегрирования, блоки 13,14 с переменным 5коэффициентом усиления, блоки 15, 16, 17 и18 умножения, блок 19 с переменным коэффициентом усиления, сумматор 20, блокдифференцирования 21,Работает система управления следующим образом. Сигнал о(т) поступает на входблока 13 с переменным коэффициентомусиления, который вместе с блоками 2,3 и 14представляет собой настраиваемую модельобъекта 1 управления, При этом сигнал Ч (т) 15и из сигнала е (1) с выхода блока 4 сравнения х(т) и у(1) с выходов объекта 1 управленияи блока 2 интегрирования. Блок 21 дифференцирования и блок 19 с переменным коэффициентом усиления совместно с 20сумматором 20 реализует вычисление сигнала 7 (т), который с выхода сумматора 20поступает на входы блоков 15,16, 17 и 18умножения. При этом далее блоки5,9,10,11,15 и 16 реализуют вторые уравнения системы уравнений (16) для настройкипараметра блока 13, а блоки 6,7,8,12,17 и 18- первое уравнение для настройки параметра блока 14 с переменным коэффициентомусиления. 30Изменение параметров блоков 13 и 14производится до тех пор, пока сигнал 7(т)не станет равным нулю, В этот момент модель объекта управления будет иметь параметры, которые обеспечивают ту же 35реакцию на входной сигнал, что и объект 1управления,Таким образом,устройство идентифи/кации может обеспечить определение параметров объекта 1 управления и при этом не 40требуется выполнения гипотезы о квазистационарности параметров последнего и определения параметров матричногоуравнения Ляпунова что упрощает синтезконтура адаптации и повышает его запас 45устойчивости. Формула изобретения Система идентификации параметров,содержащая первый блок с переменным ко эффициентом усиления, информационный вход которого является входом системы и соединен с первым входом первого блока умножения, а выход подключен к первому входу первого блока сравнения, объект управления, выход которого является выходом системы и соединен с первым входом второго блока умножения и первым входом второго блока сравнения, второй вход которого через блок с переменным коэффициентом усиления подключен к второму входу первого блока сравнения, а выход подключен к входу первого блока дифференцирования, вторые входы первого и второго блоков умножения соединены с первым входом третьего блока умножения, и первый блок интегрирования, о т л и ч а ю щ а я с я тем, что в нее введены третий блок с переменным коэффициентом усиления, три сумматора, второй и третий блоки интегрирования, второй - пятый блоки дифференцирования и четвертый блох умножения, выход первого блока сравнения через первый блок интегрирования подключен к второму входу второго блока сравнения, выход которого через третий блок с переменным коэффициентом усиления подключен к первому входу первого сумматора, второй вход которого соединен с выходом первого блока дифференцирования, а выход соединен с первыми входами третьего и четвертого блоков умножения, выходы которых соединены с первыми входами третьего и второго сумматоров непосредственно и с их вторыми входами через пятый и четвертый блоки дифференцирования соответственно, вход системы через второй блок дифференцирования подключен к второму входу четвертого блока умножения и соединен с входом объекта управления, выход которого через третий блок дифференцирования подключен к второму входу третьего блока умножения, выход оервого и второго блоков умножения через второй и третий блоки интегрирования подключены к третьим входам соответственно второго и третьего сумматоров, выходы которых подключены к управляющим входам соответственно первого, второго и третьего блоков с переменным кбэффициентом усиления..Вашкович орректо з 2864ВНИИПИ Го ьскии роиз Тираж эрс 1 вен нГ)го ко 113035, Мо ственно-издатеПодписноетета по изобретениям и открытиям при ГКНТ ССвэ, Ж, Раушская наб 4/5ком бинат "Патент", г. Ужгород, ул. Гагарина,
СмотретьЗаявка
4839001, 12.06.1990
А. Я. Лащев
ЛАЩЕВ АНАТОЛИЙ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 23/02
Метки: идентификации, параметров
Опубликовано: 30.08.1993
Код ссылки
<a href="https://patents.su/4-1837260-sistema-identifikacii-parametrov.html" target="_blank" rel="follow" title="База патентов СССР">Система идентификации параметров</a>
Устройство для измерения параметров контролируемого объекта

Номер патента: 1179230
Опубликовано: 15.09.1985
МПК: G01R 27/26
Метки: контролируемого, объекта, параметров
...отстроиться от таких мешающих Факторов как, например, уход частоты, амплитуды или Аазы генератора питающих на 50 пряжений.Цель изобретения - повышение точности измерений.Поставленная цель достигаетсятем, что в устройстве выход блока 55 Аормирования корректирующего сигнала подключен к управляюцему входу гене- ратора питающих напряжений,Предлагаемое устройство позволяетповысить точность измерений, управляяхарактеристиками преобразователей засчет изменения параметров питающихнапряжений, например амплитуды, частоты или Фазы.На чертеже представлена блок-схема устройства.Устройство содержит генератор 1питаюцих напряжений, параметрическиепреобразователи 2 и 3, блок 4 Формирования корректирующего синала ииндикатор 5 Позицией б...
Устройство для измерения геометрических параметров изображения объекта

Номер патента: 1308836
Опубликовано: 07.05.1987
Авторы: Коробко, Марков, Полуэктов, Ширнин
МПК: G01B 21/28
Метки: геометрических, изображения, объекта, параметров
...блок 7 и через него запускает вторую схему переменной задержки, состояшую из генератора 14 пилообразного напряжения и компара 5 10 1520 25 30 35 405 10 15 20 25 Формула изобретения 30 35 40 45 50 55 тора 13. Второй вход компаратора 13 соединен с выходом второго интегратора 12, При изменении напряжения на выходе интегратора 12 меняется временное положение второго строба, снимаемого с компаратора 13. Второй строб подается на второй логический блок 10. На первых входах логических блоков 7 и 10 действует видеосигнал изображения, выделенный с помощью блока 6 из полного телевизионного видеосигнала камеры 1. Им пульсы совпадения с блоков 7 и 10 поступают на входы фильтров 8 и 11, где осуществляется выделение постоянных составляющих из импульсов...
Устройство для вычисления статистических параметров контролируемого объекта
Номер патента: 481038
Опубликовано: 15.08.1975
Авторы: Дятлов, Кабанов, Милов
МПК: G06F 11/25
Метки: вычисления, контролируемого, объекта, параметров, статистических
...квдрторы 9 - 12, усредцятощцс блоки 13 - - (6, источники 17 - 19эталонцых цапр 55 кеци 11 ц вторые суммирую.щпс Олокп 20 - 22,Устройство работает следующим образом. 21 а вход контролируемого ооъекта 2, описываемого уравнением(р,1) - известные в общем случае целицейныс цестационарцые операторы;1 О поступает входной сигнал Х (1), в результатечего на его выходе возникает сигнал У (1),Кроме того, сигнал Х (1) поступает на входынелинейных фильтров 3 - 5, Выходные сигналыфильтров поступают на первые входы суммн- (5 рующих блоков 6 - 8, на второй вход которыхпоступает сигнал У(1) с выхода объекта 2. Свыходов блоков 6 - 8 сигналы У(1) - ;Ут (1)поступают ца входы квадраторов 9 - 2, н выходах которых возццкают сигналы 20l 1. Ъ(1) 7, (1). где...
Устройство для измерения параметров движения объекта

Номер патента: 1422160
Опубликовано: 07.09.1988
Авторы: Денисевич, Каликин, Камышный, Кинщак, Нестеров
МПК: G01P 3/68
Метки: движения, объекта, параметров
...напряжение с третьего выхода блока 19 управления,Матрица 16 анализирующих оптических масок анализируетиэображениес второго инФормационно измерительного канала блока 26 вычисления кор60 6чин разложения входного изображения.По истечении времени записи элемент44 задержки выдает сигнал на единичный вход триггера 37, который закрывает элемент И 39, обесточиваетусилитель 41 и закрывает электронныеключи 23, и прямой выход которогочерез усилитель 42 открывает электронные клнчи 24.В результате корреляционного сравнения сигнал со схемы 27 сравненияпоступает на единичный вход триггера 35 и переводит его в единичное состояние. Сигнал с прямого выхода триггара 35 поступает на входы установкив "0" триггеров 36 и 37 и элемент 43задержки. При этом...
Устройство для умножения переменной на дробь

Номер патента: 1543400
Опубликовано: 15.02.1990
Авторы: Золотовский, Коробков
МПК: G06F 7/52
Метки: дробь, переменной, умножения
...в регистр, в противном случае содержимое регистра не изменяется . По заднему фронту тактирующегосигнала с входа 1 3 устройства содержимое регистра сдвигается . Таким об "разомна сумматоре 5 и регистре 6осуществляется деление переменной назнаменатель . Частное образуется ра зряд з а разрядом , начиная со старшихразрядов , Разряды частного поступаютна сумматор 1 1 и регистр 1 О , гд е осущес твляет ся умножение частного начислитель , Так к ак числитель сфо рмиров ан , то умножение ведется по обычной схеме параллельно -последовательного умножения, начиная со старшихразрядов множителя и со сдвигом текущего произведения в сторону старшихразрядов ,Так как дробь всегда положительна ,а переменная может принимать как...
Предыдущий патент: Устройство для определения параметров линейных динамических объектов
Следующий патент: Измерительная система с автоматическим контролем аналого цифрового преобразования и блок задания нечувствительности
Случайный патент: Крепежный элемент