Способ контроля положения агрегата по гипсометрии и в плоскости пласта и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1814687
Автор: Долинский




Текст
(5)5 Е 21 С 27/О ТЕНТНОЕ ГОСУДАРСТВЕННОЕ ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР) Е ПАТЕНТ конструкция тензометой про- одземений. рии с ;риче ций тель скре дами На ст Целью ние надеж ности ко гипсометр выводом лНа фи ра аспранстороолн гата, поп стороны тического ОПИСАНИЕ(56) Авторское свидетельство СССР М 310044, кл. Е 21 С 27/00, 1969.Авторское свидетельство СССР М 286910, кл. Е 21 С 27/00, 1969,Авторское свидетельство СССР В 968386, кл, Е 21 С 27/00, 1981.Авторское свидетельство СССР М 211486, кл, 5 с 23/00, 1966.Авторское свидетельство СССР М 343063, кл, Е 21 С 13/08, 1968.(54) СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ АГРЕГАТА ПО ГИПСОМЕТРИИ И В ПЛОСКОСТИ ПЛАСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относится к горной про. мышленности, преимущественно к подземной разработке угольных месторождений фронтальными агрегатами, и служит для повышения надежности и производительности операций контроля и обеспечения Изобретение относится к мышленности и предназначено ной разработки угольных место изобретения является повыше- ности, производительности и точнтроля положения агрегата по ии и в плоскости пласта с полным адей из очистного забоя, г. 1 представлен общий вид агре- речное сечение; на фиг. 2 - вид со абоя и схема для вывода матемавыражения для расчета геометнепрерывной добычи угля. Для этого производится непрерывное контролирование положения става агрегата в двух точках выхода пласта в койтуры прилегающих штреков, а положение остальных секций става определяется путем непрерывного замера углов между соседними секциями и расчета согласно математическим выражениям, приведенным в формуле изобретения. Для этого датчики углового перемещения корпусами закрепляют на одних секциях става, а подвижные части взаимодействуют с соседними или ближайшими секциями, корпуса датчиков выполнены в виде жестких труб, геометрический став и подвижные части вы полнены в виде гибких труб меньшего диаметра с тензометрическими датчиками, закрепленными в двух взаимно перпендикулярных плоскостях (в плоскости пласта и в вертикальной), причем внутренние полости труб используются для кабелей передачи информации на штрек. 2 с. и 1 з.п. ф-лы, 3 а ил.ОО тава; на фиг,3 -ского датчика.грегат состоит из секций крепи 1, сектава 2 с направляющими 3 исполни- ного органа 4 и транспортирующих бков 5, движущихся по ставу 2, с приво- .6, расположенными на штреках 7 и 8.аве агрегата, состоящего из М секций, ещается тензометрический датчик 9, оложенный на ставе либо в ходке 10 за портным желобом 11, либо с забойной ны става внутри направляющих 3 исительного органа.Тензометрический датчик также состоит из Й секционных датчиков углового перемещения, каждый из которых имеет корпусную часть 12, выполненную из жесткой трубы, с окнами 13, закрытыми крышками 14, и гибких труб 15 малого диаметра с наклеенными на них тензометрическими датчиками 16, расположенными в двух взаимно перпендикулярных. плоскостях (в плоскОсти пласта и в перпендикулярной к 10 пласту плоскости). Эти гибкие тензометрические трубы 15 малого диаметра плотно беэ зазоров соединены с корпусными трубами 12 посредством конусных цанг 17 разрезного типа, поджимаемых полукольцами, расположенными во втулках 18, и защищены от внешней среды гибкими шлангами 19, ниппели которых гайками 20 обеспечивают затяжку полуколец и цанг 17, обеспечивая герметизацию внутреннего канала 21 на всей длине лавы, В этом канале размещаются кабели 22, передающие на центральный пульт 23 всю информацию от тензометрических датчиков 16, а также от других датчиков по проводам, которые могут вводиться через некоторые окна 13, оборудованные специальными тройниковыми крышками 14. На центральном пульте 23, расположенном на примыкающем к лаве.штреке, предусматривается ЭВМ с микропроцессорами, обрабатывающими. по жесткой программе 15 20 25 30 ду соседними секциями соответственно в плоскости пласта и в вертикальной (по гипсометрии) плоскости, где и) изменяются от 1 дой,Для реализации способа контроля положения агрегата по гипсометрии предусматривается программа обработки аналоговых 40 сигналов по следующему алгоритму, определяющему для каждой секции с номером и ее вертикальную координату от плоскости, проходящей через две точки 24 и 25 фактического выхода почвы пласта в контуры при 45 50 мыкающих к лаве штреков. Эти точки заблаговременно отмечаются при проходке штреков в виде реперов в штреках и отметок на маркшейдерских картах, где одновременно наносятся их координаты с учетом информации, получаемой от разведочных скважин и от проходки оконтуривающих проходок. Вывод алгоритма расчета координатысекции номер и ясен из фиг. 2; Лп=Ь-Ьч - "+д.,55 где п =а (и)1; аналоговые сигналы аи адля углов междп =Ь - -+Ьи -Н - п ий Яи - номер секции; т - шаг секций; Вв координата подошвы става от линии, соединяющей реперы на двух примыкающих к лаве штреках; И - полное число секций агрегата; А, - положение начальной секции става в точке выхода пласта в контур примыкающего штрека; Ьм - положение конечной секции става в точке выхода пласта в контур примыкающего штрека; пл - положение секции става номер п относительно линии соединяющей реперы на штреках; Ъ чположение конечной секции става относительно начальной; б - угол в вертикальной плоскости по гипсометрии между соседними секциями става.В случае контроля и расчета положения става в плоскости пласта относительно линии, соединяющей соответствующие реперы на примыкающих к лаве штреках, вместо индекса для углов между секциями применяется индекс ) с использованием того же математического выражения.Предложенный способ позволяет повысить надежность управления, так как любое изменение координаты по высоте или в плоскости пласта любой из секций мгновенно отражается на дисплее центрального пульта на фоне запрограммированной гипсометрии пласта или линии става в плоскости пласта и в любом масштабе, определяя своевременно команды для дистанционного или автоматического управления агрега-. том.Вторым достоинством предложенного способа является исключение затрат времени на выполнение операций контроля движения агрегата относительно границы уголь - порода, так как необходимые данные о положении пласта находятся в программе, которую изредка корректируют, вводя поправки в ЭВМ, без приостановки производительной работы агрегата. Предполагаемый экономический эффект от применения агрегата до 1,5 млн,руб. на один агрегат,Ф о р мул а из о бр ете н ия 1, Способ контроля положения агрегата по гипсометрии и в плоскости пласта, включающий определение положения секций става агрегата по гипсометрии пласта относительно границы уголь - порода по крайней мере в точке по длине лавы, о т л и ч а ющ и й с я тем, что, с целью повышения надежности и производительности контроля, контроль положения става агрегата производят и в плоскости пласта, причем замер положения става агрегата производят в крайних10 секциях става в точках выхода пласта в контуры прилегающих штреков, а положение остальных секций става в пространстве определяют путем непрерывного замера меняющихся углов аи амежду соседними 5 секциями става агрегата согласно математическим выражениямЬ=.-ч,.ч +д.;игде ьп- ао - 09;Й - иидп =Ь - +Ьч -й йи - номер секции; 151 - шаг секции;Л - координата подошвы става от линии выхода почвы пласта на штреки;ч - полное число секций става агрегата;Ьо - положение начальной секции ста ва агрегата в точке выхода пласта в контур прилегающего штрека;Ли - положение конечной секции става агрегата в точке выхода пласта в контур прилегающего штрека; 25пп - положение секции става номер п относительно начальной секции става;пи - положение конечной секции става относительно положения начальной секции става; а- угол в вертикальной плоскости между соседними секциями става (по гипсометрии);а- угол в плоскости пласта между соседними секциями става агрегата,2, Устройство для контроля положения агрегата по гипсометрии и в плоскости пла- ста, включающее датчики углового перемещения, корпусы которых закреплены на одних секциях, Й подвижные части установлены с возможностью перемещения по соседней или близкой секции става, о т л и ч аю щ е е с я тем, что, с целью повышения точности контроля корпусыцатчиков выполнены в виде жестких труб, моделирующих геометрические параметры става, а подвижные части выполнены в виде гибких труб меньшего диаметра относительно жестих труб, соединены с последними плотно и имеют тензометрические датчики, расположенные в двух взаимно перпендикулярных плоскостях, с кабелями, расположенными внутри гибких и жестких труб,3. Устройство по п,2, о т л и ч а ю щ е ес я тем, что, с целью защиты от агрессивной шахтной среды, оно снабжено гибкими шлангами для размещения в них тензометрических датчиков, кабелей и мест соединения труб.1814687 6 15Составитель А,Долинский Редактор Техред М.Моргентал Корректор М.Керецма аказ 1843 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ С113035, Москва, Ж, Раушская наб 4/5Производственно-издательский комбинат "Патент", г. ужгород, ул.Гагарина, 101
СмотретьЗаявка
4880633, 03.08.1990
A. M. Долинский
ДОЛИНСКИЙ АРКАДИЙ МАРКОВИЧ
МПК / Метки
МПК: E21C 27/00
Метки: агрегата, гипсометрии, пласта, плоскости, положения
Опубликовано: 07.05.1993
Код ссылки
<a href="https://patents.su/4-1814687-sposob-kontrolya-polozheniya-agregata-po-gipsometrii-i-v-ploskosti-plasta-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ контроля положения агрегата по гипсометрии и в плоскости пласта и устройство для его осуществления</a>
Устройство для определения положения стыка труб

Номер патента: 860390
Опубликовано: 30.07.1985
Авторы: Иванов, Сироко, Шнайдер
МПК: B21C 51/00, B23D 21/00
...на раме 1 механизм 2 контроля диаметра проходящей трубы и механизм 3 для определения длины стыка. На , 55 этой же раме размещен трубообраба-тывающий станок, включающий зажимной патрон 4 и отрезное устройство 5. Механизм 2 контроля диаметра проходящей трубы выполнен в виде корпуса 6, несущего подвижную подпружиненную направляющую 7, оснащенную на одном конце своем гайкой 8 с датчиком 9 стыка, а на другом своем конце рычагами 10, закрепленными посредством осей 11. Рычаги оснащены пружиной 12 и сменными упорами 13 с внутренними цилиндрическими выточками, образующими калибр с диаметром, равным диаметру измеряемой трубы. На корпусе 6 смонтирован переключатель 14 устройства для определения длины стыка 3.Механизм 3 определения длины...
Устройство определения положения соединения труб
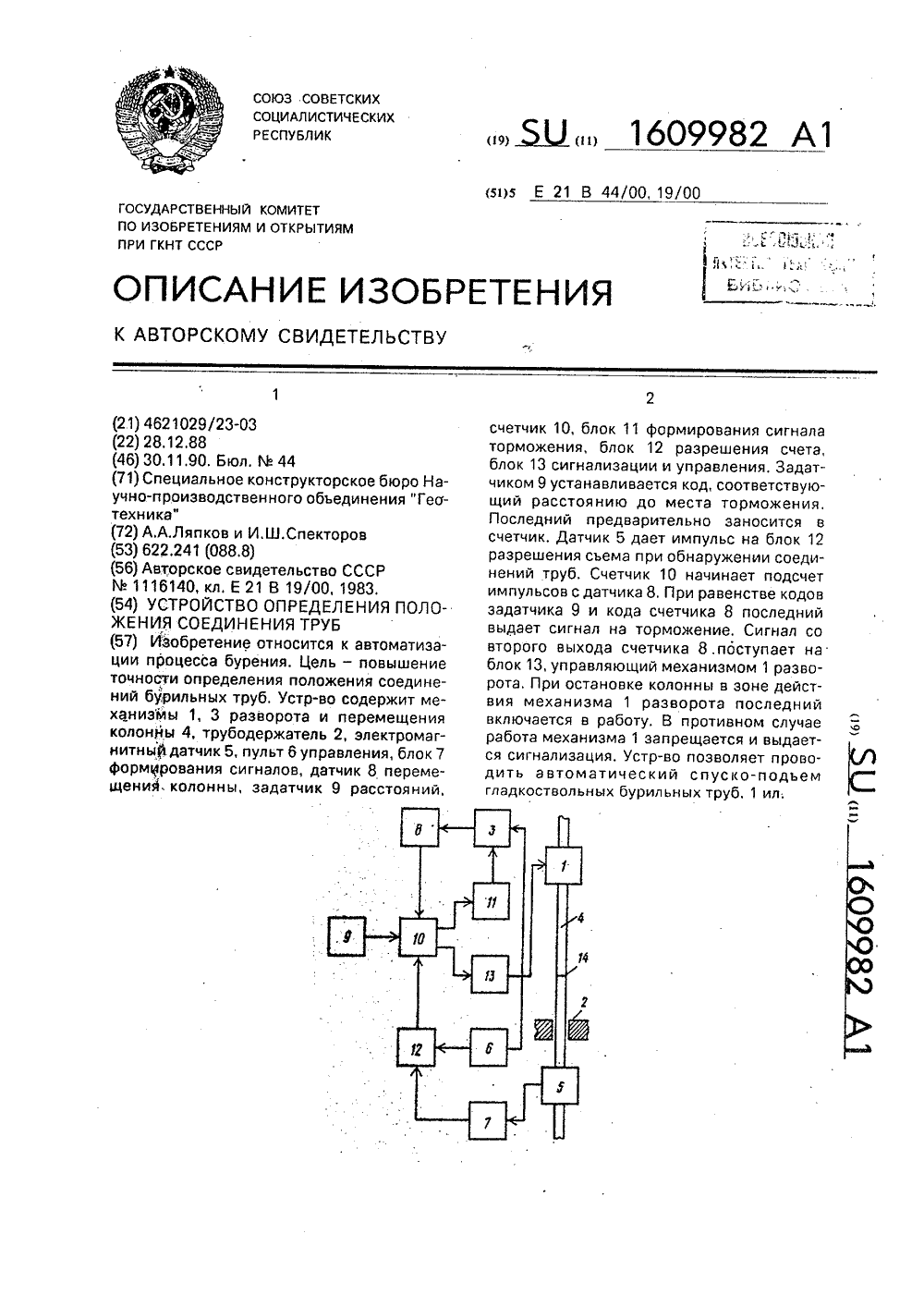
Номер патента: 1609982
Опубликовано: 30.11.1990
МПК: E21B 19/00, E21B 44/00
Метки: положения, соединения, труб
...соединен с 35механизмом 3 перемещения колонны, выход которого соединен с входом датчика 8перемещения колонны. Второй выход счетчика 10 соединен с входом блока 13 сигнализации и управления, выход которого 40связан с механизмом 1 разворота колонны.Устройство работает следующим образом.При включении на пульте 1 управлениябуровой установки операции "Подъем" механизм 3 перемещен 1 ля начинает подъем колонньь Одновременно блок 12 разрешениясчета выдает необходимые подготовительные команды счетчику 10, а датчлк 8 перемещения колонны подает импульсы, 50каждый из которых соответствует перемещению колонны на определенныл отрезок,При прохождении через электромагнитныйдатчик 5 резьбового соединения бурильныхтруб сигнал датчика 5 поступает на...
Устройство для управления выемочной машиной по гипсометрии угольного пласта

Номер патента: 678186
Опубликовано: 05.08.1979
МПК: E21C 35/08
Метки: выемочной, гипсометрии, машиной, пласта, угольного
...соединены со штоками горизонтально расположенного двухштокового гидро цилиндра 6, неподвижного относительно борта 2 секции базы. Горизонтальное направление перемещения полэунов 5 определяется направляющими 7, образующими паз, открытый с двух сторон 1 О для уменьшения влияния штыба. Подвижная направляющая 1 имеет также две вертикальные опоры, расположенные с внешних сторон горизонтальных опор. Они состоят из съемного стержня 8, жестко соединенного с подвижной направляющей 1, который перемещается в вертикльно расположенном цилиндре 9, укрепленном неподвижно относитель. но борта 2 секции базы и открытом в нижней части для устранения воэмож-ности заштыбовки. Длина цилиндра 9 определяется двойной величиной хода подвижной направляющей 1...
Устройство для управления комплексом или агрегатом в плоскости пласта

Номер патента: 1451278
Опубликовано: 15.01.1989
Авторы: Дементьев, Курсаков, Левшин, Наместников
МПК: E21D 23/00, E21D 23/08
Метки: агрегатом, комплексом, пласта, плоскости
...жидкости под давлением. В зависимости от количества порций, поданных в полость 13, стакан 7 под действием штока 11 45 выдвигается либо на величину а, либо на величину Ъ. Стакан 7 установлен в гильзе 6 с возможностью восприятия боковых нагрузок, разгружая при этом элементы 9, 10 и 11 устройства.Устройство работает следующим образом.При опускании агрегата по падению пласта (фиг.1) рабочая полость 13 соединяется со сливом. Рабочая жидкость подается в поршневые полости гидроцилиндров передвижки 4, и происходит вьщвижка базы агрегата на требу емую величину. Поскольку лыжи базы.линообраэны, то база при ее движении вперед одновременно смещается вниз на величину а (за счет клина) под действием гравитационных сил. После вьдвижки базы выдвигаются...
Очистной агрегат для разработки угольных пластов пологого залегания

Номер патента: 113514
Опубликовано: 01.01.1958
Авторы: Барановский, Долинский, Орлов
МПК: E21C 27/04
Метки: агрегат, залегания, очистной, пластов, пологого, разработки, угольных
...и стоск производится во время движсния става, чем обеспечивается непрерывность подачи агрегата на забой. Передвигание поддерживающих козырьков и стоек может производиться по разным схемам. передвижки, в зависимости от состояния пород кровли и давления последней.Включение гидросистемы секции на передвижку козырька и стойки производится автоматически с помощью переключающих автопилотов по исчерпании хода домкратов, направленного на псрсдвижсние става. При переключении стойки выводятся из-под распоря, и козырек опирается посредством рессорной пружины 11 ня стенку секции.Кольцевой отбойно-доставочный исполнительныорган состоит из двух одинаковых приводов 12, тяговой крупнозвенной цепи 15, кареток (ковшей) 14 и скребков, Приводы...
Предыдущий патент: Способ переработки твердого топлива
Следующий патент: Податливая крепь горной выработки
Случайный патент: Способ для управления обработкой в потоке стыков элементов непрерывной плети и устройство для его осуществления