Способ определения пространственного положения подвижного объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1788435
Авторы: Бакулин, Бахов, Калашников, Покровский
Текст
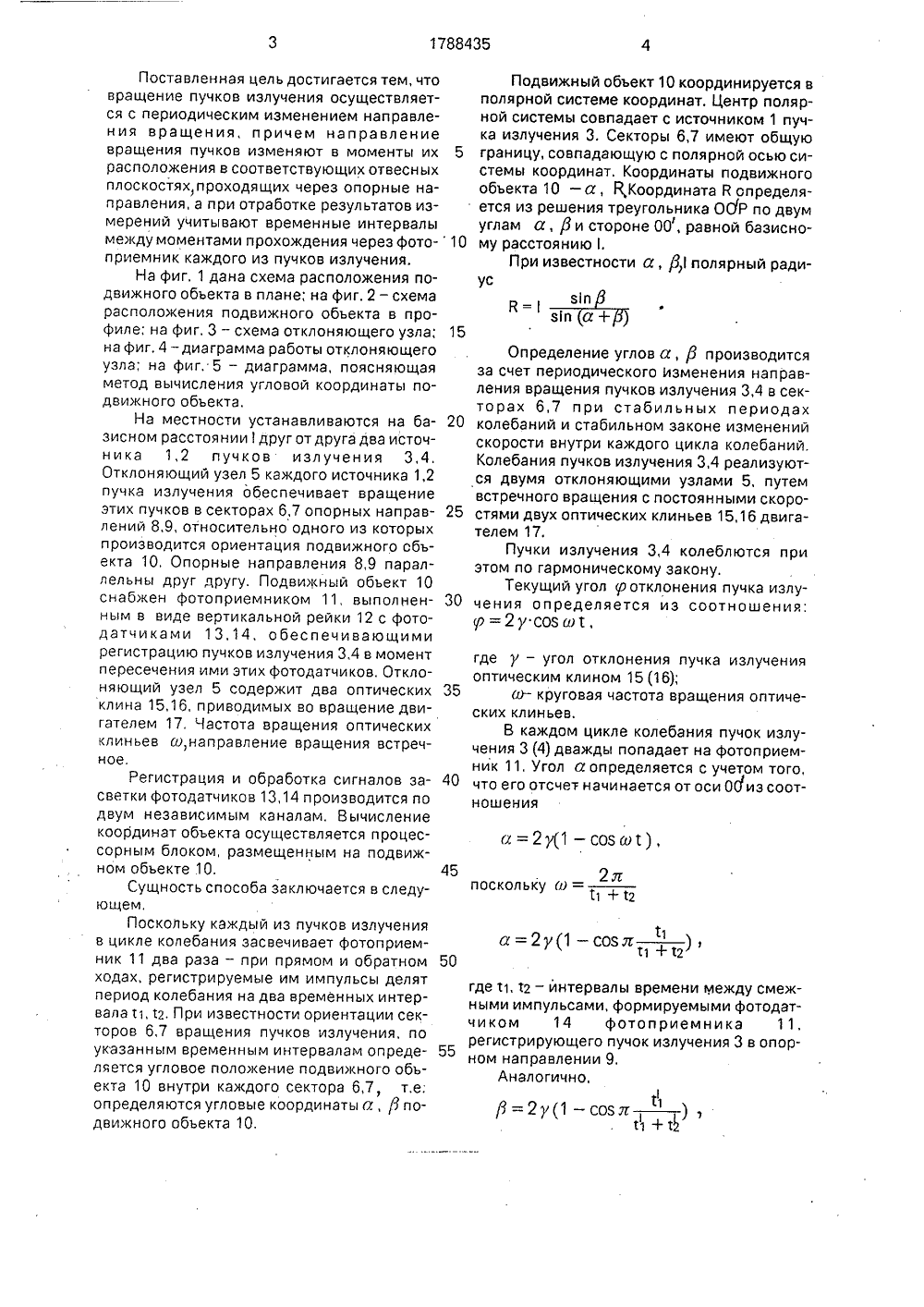
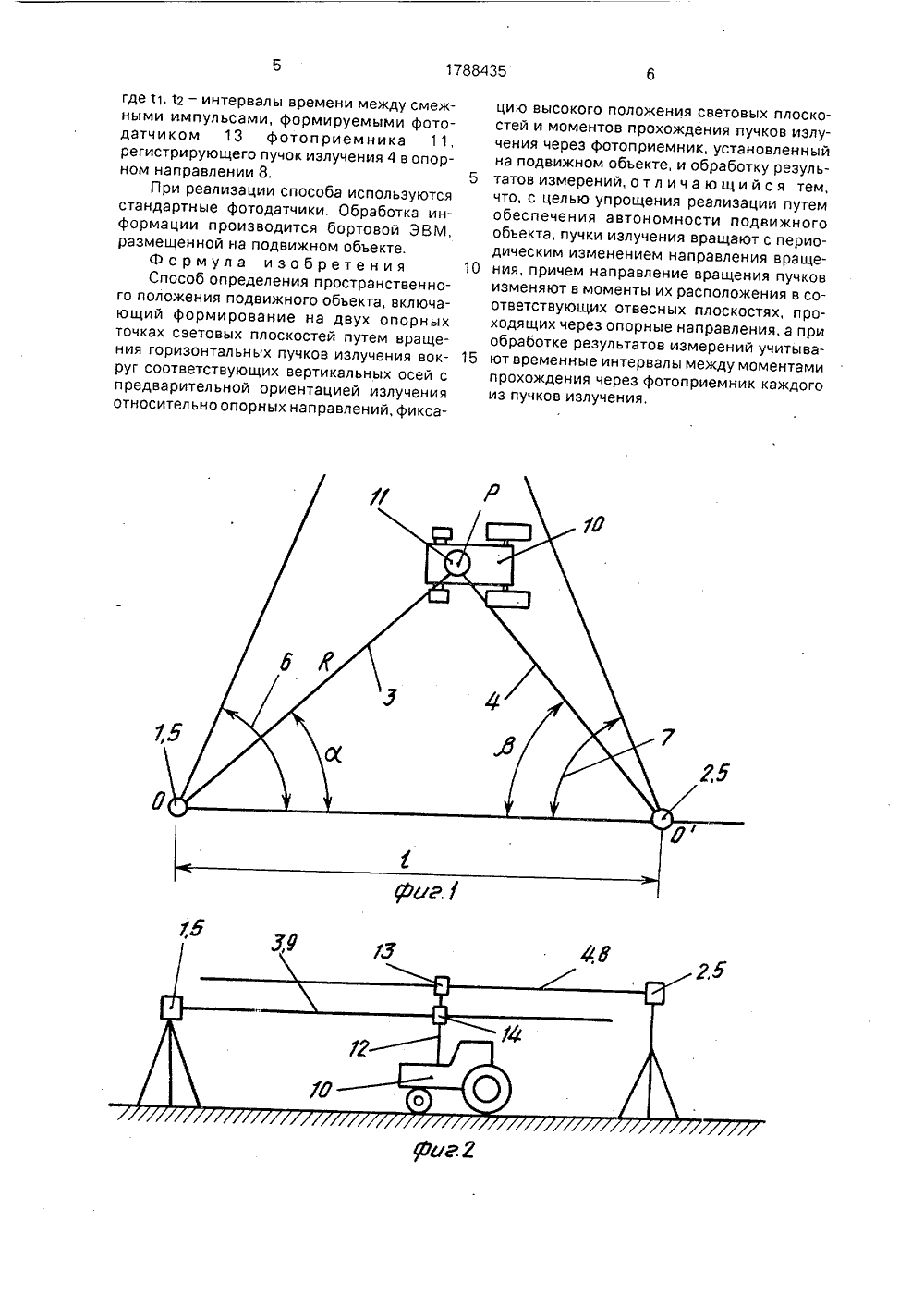
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 178 5 0 01 С 15/00 ГОСУДАРСТВЕННОЕ ПАТЕНТНОВЕДОМСТВО СССР(ГОСПАТЕНТ СССР) Е ИЗОБРЕТЕНИЯ ОПИСАНИК АВТОРСКОМУ С ТЕЛЬСТВУ координированию землеройных маш может быть использовано при провед мелиоративных работ, Способ определ пространственного положения подвиж объекта заключается в том, что на бази расстоянии от первого источника све го пучка устанавливают второй исто светового пучка, формирующий плос параллельную плоскости первого источ светового пучка. Световые пучки перв второго источников периодически ме направление вращения. Определение динат подвижного объекта относительн точников световых пучков производя временным интервалам 11, 12 между им сами засветки фотоприемника, расп женного на подвижном объекте, 5 ил..Калаш ССР87. ПРОСТРАН- ОДВИЖНОо ист по пуль- олоотносится к области автотельства, а именно к автоИзобретение относится к области автоматизации строительства, а именно к автокоординированию землеройных машин и ожет быть использовано при проведении елиоративных работ.Известен способ определения пространственного положения подвижного объекта. При реализации способа посредством световых пучков формируются опорные плоскости, которые регистрируются фотоэлектрической рейкой расположенной на неподвижном объекте. ется способ определения пространственного положения подвижного объекта, по которому на базисном расстоянии друг от друга устанавливаютдва формирователя опорных лазерных плоскостей, ориентируют их друг относительно друга и определяют с помощью фотоприемного блока, установлен ного на транспортном средстве, его М плановые и высотные координаты. При этом фотоприемник фиксирует моменты прохождения пучка излучения, которые в дальнейшем используются при обработке ф результатов измерений.Однако известный способ не позволяет формировать информацию в положении объекта на самом подвижном объекте.Целью изобретения является расширение возможностей способа путем формирования координат непосредственно на подвижном объекте. пособ анала ракте ых осн предполагает использочто снижает эксплуатаристики устройства, овывается на этом споОднакование радиоционные хработа которсабе,Наиболением по атно бли ени им техническим решек предложенному явля(21) 4804115/10(71) Специальногическое бюро Ггорисполкоме(54) СПОСОБ ОПСТВЕННОГО ПОГО ОБЪЕКТА(57) Изобретениематизации строи ин и ении ения ного сном товочник кость, ника ого и няютПоставленная цель достигается тем, чтовращение пучков излучения осуществляется с периодическим изменением направления вращения, причем направлениевращения пучков изменяют в моменты их 5расположения в соответствующих отвесныхплоскостях, проходящих через опорные направления, а при отработке результатов измерений учитывают временные интервалымежду моментами прохождения через фото-10приемник каждого из пучков излучения.На фиг, 1 дана схема расположения подвижного объекта в плане; на фиг. 2 - схемарасполокения подвижного объекта в профиле; на фиг. 3 - схема отклоняющего узла; 15нэ фиг,4 - диаграмма работы отклоняющегоузла; на фиг, 5 - диаграмма, поясняющаяметод вычисления угловой координаты подвижного объекта,На местности устанавливаются на базисном расстояниидруг от друга два источника 1,2 пучков излучения 3,4,Отклоняющий узел 5 каждого источника 1,2пучка излучения обеспечивает вращениеэтих пучков в секторах 6,7 опорных направлений 8,9, относительно одного из которыхпроизводится ориентация подвижного объекта 10, Опорные направления 8,9 параллельны друг другу. Подвикный объект 10снабжен фотоприемником 11, выполненным в виде вертикальной рейки 12 с фотодатчикэми 13,14, обеспечивающимирегистрацию пучков излучения 3,4 в моментпересечения ими этих фотодатчиков, Отклоняющий узел 5 содержит два оптических 35клина 15,16, приводимых во вращение двигателем 17, Частота вращения оптическихклиньев в,направление вращения встречное.Регистрация и обработка сигналов эасветки фотодатчиков 13,14 производится подвум независимым каналам, Вычислениекоординат объекта осуществляется процессорным блоком, размещенным на подвижном объекте .10. 45Сущность способа заключается в следующем,Поскольку каждый из пучков излученияв цикле колебания засвечивает фотоприемник 11 два раза - при прямом и обратном 50ходах, регистрируемые им импульсы делятпериод колебания на два временных интервала т 1, 12. При известности ориентации секторов 6,7 вращения пучков излучения, поуказанным временным интервалам определяется угловое полокение подвикного объекта 10 внутри каждого сектора 6,7, т,е;определяются угловые координаты а, /3 подвикного объекта 10. Подвижный объект 10 координируется в полярной системе координат. Центр полярной системы совпадает с источником 1 пучка излучения 3. Секторы 6,7 имеют общую границу, совпадающую с полярной осью системы координат. Координаты подвижного объекта 10 -а, Й,Координата й определяется из решения треугольника ОбР по двум углам а, Р и стороне 00, равной базисному расстоянию ,При известности а, Р полярный радиусзи зи а + Определение углов а, Р производится за счет периодического Изменения направления вращения пучков излучения 3,4 в секторах 6,7 при стабильных периодах колебаний и стабильном законе изменений скорости внутри каждого цикла колебаний. Колебания пучков излучения 3,4 реализуются двумя отклоняющими узлами 5, путем встречного вращения с постоянными скоростями двух оптических клиньев 15,16 двигателем 17.Пучки излучения 3,4 колеблются при этом по гармоническому закону.Текущий угол р отклонения пучка излучения определяется иэ соотношения: р=2 у соарес,где у - угол отклонения пучка излучения оптическим клином 15 (16);в- круговая частота вращения оптических клиньев.В каждом цикле колебания пучок излучения 3 (4) дважды попадает на фотоприемник 11, Угол а определяется с учетом того, что его отсчет начинается от оси 00 из соотношенияа = 2 у(1 - соя сот),2 лпоскольку и -1 +1 га=2 у(1 - созл)где т 1, 12 - интервалы времени между смежными импульсами, формируемыми фотодатчиком 14 фотоприемника 11, регистрирующего пучок излучения 3 в опорном направлении 9,Аналогично,1= 2 у(1 - соя,7 г,),6+6где т 1, 12 - интервалы времени между смежными импульсами, формируемыми фото- датчиком 13 фотоприемника 11, регистрирующего пучок излучения 4 в опорном направлении 8,При реализации способа используются стандартные фотодатчики, Обработка информации производится бортовой ЭВМ, размещенной на подвижном объекте.Формула изобретения Способ определения пространственного положения подвижного объекта, включающий формирование на двух опорных точках световых плоскостей путем вращения горизонтальных пучков излучения вокруг соответствующих вертикальных осей с предварительной ориентацией излучения относительно опорных направлений, фиксацию высокого положения световых плоскостей и моментов прохождения пучков излучения через фотоприемник, установленный на подвижном объекте, и обработку резуль татовизмерений,отличающийся тем,что, с целью упрощения реализации путем обеспечения автономности подвижного обьекта, пучки излучения вращают с периодическим изменением направления враще ния, причем направление вращения пучковизменяют в моменты их расположения в соответствующих отвесных плоскостях, проходящих через опорные направления, а при обработке результатов измерений учитыва ют временные интервалы между моментамипрохождения через фотоприемник каждого из пучков излучения,1788435 4 Составитель О.Добр Техред М.Моргента едак Подписноезобретениям и открытиямРаушская наб., 4/5 КНТ ССС Производственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 Заказ 69ВНИ Тираж Государственного комитета и 113035, Москва, Ж
СмотретьЗаявка
4804115, 19.03.1990
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКОЕ БЮРО ГЛАВМОСИНЖСТРОЯ ПРИ МОСГОРИСПОЛКОМЕ
БАКУЛИН АЛЕКСАНДР СЕРГЕЕВИЧ, БАХОВ СЕРГЕЙ АНАТОЛЬЕВИЧ, КАЛАШНИКОВ ВАДИМ ЭДУАРДОВИЧ, ПОКРОВСКИЙ ВЛАДИМИР БОРИСОВИЧ
МПК / Метки
МПК: G01C 15/00
Метки: объекта, подвижного, положения, пространственного
Опубликовано: 15.01.1993
Код ссылки
<a href="https://patents.su/4-1788435-sposob-opredeleniya-prostranstvennogo-polozheniya-podvizhnogo-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения пространственного положения подвижного объекта</a>
Устройство для передачи света между подвижным и неподвижным объектами

Номер патента: 1386050
Опубликовано: 30.03.1988
Авторы: Манфред, Ульрих, Хельмут, Хольгер, Хорст
МПК: G02B 6/44
Метки: между, неподвижным, объектами, передачи, подвижным, света
...на барабане 4, установленном с возможностью вращения в направлении стрелки 15, неподвижную планку 16, ориентированную вдоль направления 10, на которой закреплена другая концевая часть 17 элемента 1, а верхняя часть 18 которой служит опорной поверхностью для гибкого направляющего элемента 1, крепежные хомутики 19 для прикреп ления кабеля 2 к элементу 1 по всей его длине, Предпочтительно такое закрепление кабеля 2, когда плоскость ленты 1 проходит через диаметральную плоскость 20 кабеля 2,Вращение барабана 4 и перемещение платформы 5 позволяют направить сфокусированный пучок 13 в любую точку носителя записи 14. При перемещении платформы 5 гибкий элемент 1 разматывается или сматывается по опорной поверхности 18, Выполнение элемента 1 в...
Устройство для связи между подвижным и неподвижным объектами

Номер патента: 881813
Опубликовано: 15.11.1981
Авторы: Бормисов, Бриденко, Лещенко, Правилин, Хараев
МПК: G08G 1/09
Метки: между, неподвижным, объектами, подвижным, связи
...размыкающий контакт дополнительного переключающего элемен 134та 21 подключена ко входу усгг:гите.гя-ограничителя 9, а вход первого согласующего усилителя через размыкающийконтакт переключающего элемента 12подключен к выходу усилителя 11 шгзкой частоты.При появлении подвижного объекта,например автобуса, в зоне действиясвязи по сигналу "Пуск" формирователь 15 кода номера подвижного объекта с первого выхода начинает выдавать в последовательном коде сигнал, соответствующий номеру подвижного объекта. Одновременно со второго выхода формирователя 15 снимаетсясигнал гостоянного уровня, которыйчерез управлягоцгий элемент 18 и второй согласующий усилитель 19 поступает на регге 20, которое замыкает своизамьисающи е контакты в пер е ключ аюц 1...
Волоконно-оптический преобразователь угловой скорости вращения пучка лучей

Номер патента: 1569769
Опубликовано: 07.06.1990
Авторы: Бондаренко, Гогин, Джангобегов, Ильин, Карапетьян, Свечников, Чигорко, Шапарь, Шевелев
МПК: G02B 6/04
Метки: волоконно-оптический, вращения, лучей, пучка, скорости, угловой
...кольце 2 вдоль радиальныхлиний, отстоящих друг от друга наугол,. равный 360 /К 1, например (-б(фиг .2), расположены другими торцами во втором кольце 3 вдоль общеРрадиальной линии с отклонением отнее на величину не более поперечногоразмера соответствующего торца световода (фиг.З) .Преобразователь работает следующим образом. 40 Световой пучок, диаметр которого меньше или равен ширине кольца оптического входа преобразователя, проецируется на торцы световодов, вы бранные в качестве входных. Выбор торцов в качестве входных определяется величиной коэФФициента преобразования К. Если К) 1, то входными торцами являются торцы, уложенные в первом кольце 2. Световой пучок проецируется на эти торцы и вводится внутрь световодов, Благодаря...
Устройство для контроля синхронности вращения двух объектов

Номер патента: 773495
Опубликовано: 23.10.1980
МПК: G01P 3/56
Метки: вращения, двух, объектов, синхронности
...фотоприемник 5. Статор 2 и ротор 4 кинематически связаны с объектами контроля механическими связями 6 и 7. На стойке установлен диск 8. Фотоприемник 5 подключен через амплитудный селектор 9 к блоку 10 определения абсолютной скорости и блоку773495 на выходе блока определения относительной скорости сигнал отсутствует. При неподвижном роторе сигнал отсутствует на выходе блока определения абсолютной скорости. Формула изобретения разделяются и подаются на входы соответИсточники информациин1 ствующих блоков определения скоростеи попринятые во внимание при экспертизе астоте сигналов.1. Авторское свидетельство СССР по заПри отсутствии скольжения частота сиг- явке2548297/18-11, кл. б 01 Р 3/56; пала относительной скорости равна нулю и Зо В 60...
Способ определения девиации курсоуказателя подвижного объекта

Номер патента: 1633930
Опубликовано: 10.12.1995
Авторы: Проскуряков, Саюров, Скрипкин
МПК: G01C 17/38
Метки: девиации, курсоуказателя, объекта, подвижного
...О О О а Ь с12 2 12 О О О а Ь с О О О2 2 12а Ь с12 12 12 О О О О О а Ь с О з э зО О О О О О а Ь с24 24 24 О О О О О О а Ь с 24 24 24 выражения для а), Ь); с имеет аналогичныйвид,Систему девяти скалярных уравненийвида(6) можно привести к матричной форме; где Х, т - матрицы-столбцы размером (9 х 1); й - квадратная матрица размером (9 х 9) с элементамиРазностные уравнения (5) должны удовлетворять непременному условию 1 Х) и каждый результат эксперимента (1 или ) не должен повторяться в системе более чем два раза.Системе трех разностных уравнений вида (5) соответствует система девяти скалярных раэностных уравнений Пуассона следующего вида(а + 1) (а - а + Ь(Ь - Ь + с (с - с- Тх - Тх)б(а -а )+(е+1)(Ь -Ь )+Г(с -с )))Т Т (1) = 1,4)у у9 (а - а...
Предыдущий патент: Способ трассирования наносов
Следующий патент: Устройство для определения магнитного азимута
Случайный патент: Способ термо-механико-магнитной обработки металлов и сплавов