Способ контроля продольного порыва ленты
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1671569
Авторы: Гончаренко, Ильченко, Назаренко, Савицкий, Солохненко, Шолтыш
Текст
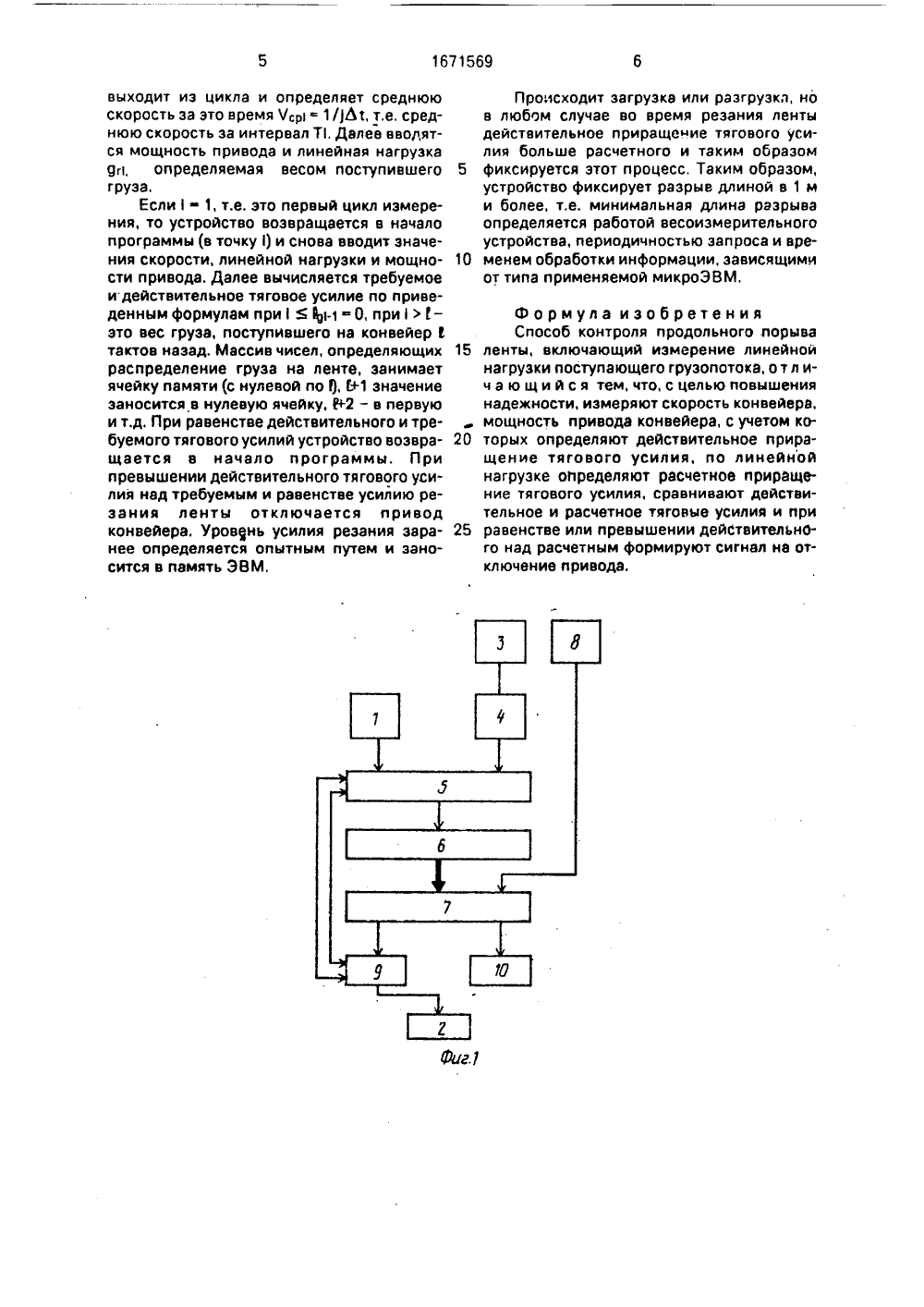
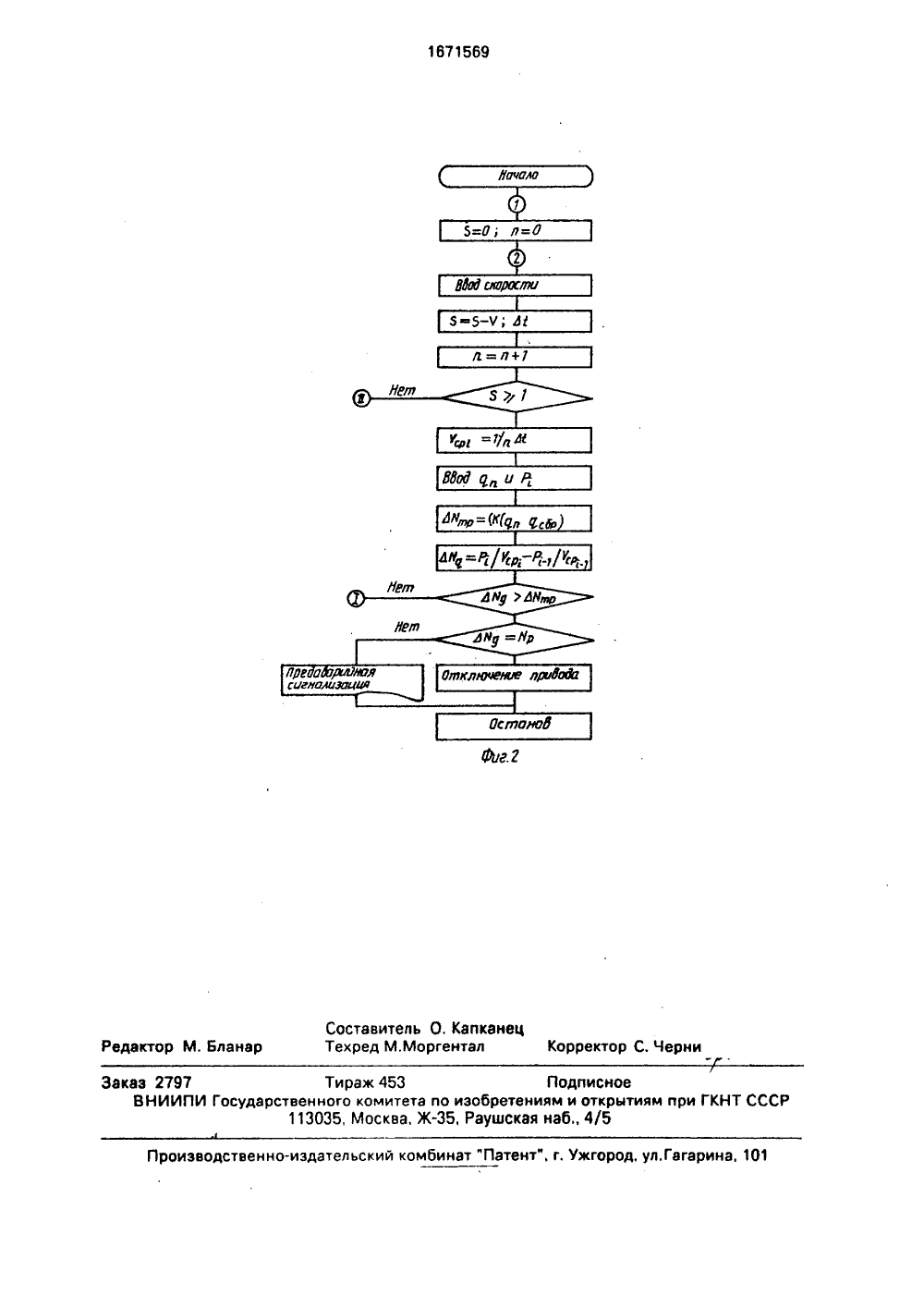
)арф ПИСАНИЕ ИЗОБРЕТЕН ВТОРСКО ВИДЕТЕЛЬСТ ный институт и остроительный ицкий, Г.Н,ГонР. Г. СолохненСССР 1987. РОДОЛЬНО автоматизации онвейеров в горстроительстве, ости определеР Р О - 1/ ср /ср (1 - 1) сть привода в 1-й момен к автоматизаты конвейеров металлургии и где в е яется повышея продольного ейерной ленты аружения этого ивода в предыдущий ду измеряют мощо с измерением зки, причем иэтно, через вреемещения груза начений мощноодят определещения тягового ово- ще- ится- 9 с 1иент пропорциональнос ная нагрузка. создавае узам в 1-й момент врем мая и ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(71) Криворожский горнорудНовокраматорский машинзавод(54) СПОСОБ КОНТРОЛЯПОРЫВА ЛЕНТЫ(57) Изобретение касаетсконтролясостояния лентыной пром-ти, металлургииЦель - повышение надеж Изобретение относится ции контроля состояния лен в горной промышленности,строительстве. Целью изобретения явл ние надежности определен порыва на всем участке кон и уменьшении времени обн порыва,Достигается это тем, что ность привода одновременн скорости и линейной нагру мерения производят дискре мя Ть необходимое для пер на 1 м, после регистрации э сти привода в памяти пров ние действительного прира усилия:ния продольного порыва на всем участке конвейерной ленты и уменьшение времени обнаружения этого порыва, Для этого измеряют линейную нагрузку поступающего грузопотока, скорость конвейера и мощность привода конвейера. С учетом измеренных скорости и мощности определяют действительное приращение тягового усилия, а по линейной нагрузке - расчетное приращение тягового усилия, Сравнивают действительное и расчетное тяговые усилия и при превышении или равенстве действительного над расчетным формируют сигнал на отключение привода конвейера, Способ позволяет фиксировать разрыв длиной в 1 м и более. Минимальная длина разрыва определяется работой весоизмерительного устрва, периодичностью запроса и временем обработки информации. 2 ил. р мени,Р(р 1) мощность прмомент времени;/ср - средняя скорость на 1-й интервавремени измерения Т 1;Чср(н) - сРеднЯЯ скоРость за пРедыщий интервал времени измерения.Расчет требуемого приращения тягго усилия для транспортирования прирания веса груза на конвейере производпо формулеЛ Мтр - 1 с(9 пгде )с - коэффиц ти,9 ю - линейпоступившим гр ендс - линейнаЯ нагРУэка сбРасываемого груза,После этого осуществляется операция сравчения Лйвай,р и Ьйв - йр. При удовлетворении первого неравенства и второго равенствд проводя отключение привода конвейера и индицируют аварийную ситуацию - "Порыв ленты". Величина условия резания йр определяется экспериментальным путем для каждой конвейерной установки, например, на участке ленты, предназначенным для замены, Значение усилия резания можно получить эксплуатационному персоналу по запросу на завод- изготовитель конвейерной ленты.Расчет требуемого тягового усилия производится на основании известных выражений тягового усилия;РО =1 + кр - )М 9 о - о.г. +4 й гН+ М дг 1 гг+дп 1 о.г.)дгН 1) где в- коэффициенты сопротивления;9,-линейная нагрузка гибкого рабочего органа и вращающихся частей конвейера;дп - линейная нагрузка подвесок и тележек подвесных толкающих и тянущих конвейеров на 1 м длины;Ь,г, - горизонтальная проекция общей длины тягового органа;Ь,г. - длина горизонтальной проекции пути перемещения груза;Н - высота подъема груза с учетом добавочной высоты подъема на сбрасывающей двухбарабанной тележке;а - сумма эффективных углов поворота тягового органа по всей трассе, кроме привода;1 р - коэффициент, учитывающий род при вода и особенности трассы конвейера.Так как только величина дг является переменной, то выражение(1) можно преобразоватьМо = с + " 9 г+ ск 1 9 гНилио = Ко + 9 г".Далее находится требуемое приращение тягового усилия, определяемого разностью междУ весом постУпившего гРУза 9 п и весом сброшенного груза дс за время цикла измеренияЛнт= чо- чо" = о+ дпк) - о++ дс) = кдп - дс,где дп - линейнаЯ нагРУзка, создаваемаЯ поступившим грузом;дс - линейнаЯ нагРУзка сбРасываемогэ груза.При изменении веса груза, находящегося на конвейере, изменяется тяговое уси лие, развиваемое приводом конвейера, которое проявляется в изменении мощностипривода (2); т.е,Р Р)5 ц Ч Ч )где Р, Ч - мощность и скорость, развиваемая приводом в данный момент времени;Р(-), Ч(-1) - мощность и скорость, развивавшаяся приводом в предыдущий моментизмерения.При нормальной работе конвейераЬ(Чя = Мр во время резания ленты происходит увеличение нагрузки на приводе итаким образом становится больше Ьйр.Отключение привода конвейера осуществляется после операции сравнения, в случае равенства усилия ЛИФ 0 реза лентыйр, Усилие реза ленты берется с паспортазавода-изготовителя ленты или экспериментальным методом, например прореэывание ленты, подлежащего замене.На фиг, 1 показана схема устройствадля реализации способа; на фиг. 2 - алгоритм работы устройства.Устройство состоит из датчика 1 мощности привода 2 конвейера, соединенного среле 9 отключения, весоизмерительногоблока 3, присоединенноо через усилитель 30 35 40 45 50 55 4 к коммутатору 5, Выход коммутатора 5соединен с входом аналого-цифрового преобразователя (АЦП) 6, выход которого соединен с первым входом блока 7 вычисления,выполненного на основе микроЭВМ, а к второму входу блока 7 подключен датчик 8 скорости, При этом микроЭВМ соединена скоммутатором 5. Выходы блока 7 подключены к реле отключения конвейера 9 и к блоку10 сигнализации.Весоизмерительное устройство изме-ряет линейную нагрузку, т.е. вес груза на 1м, поэтому значения веса груза и мощностивводятся с интерваломТ =Я 1Ч ср Ч срДля того, чтобы устройство работало ина конвейерах с регулируемой скоростью,значение скорости необходимо вводить синтервалом Ьт Т,Устройство начинает работать по окончании разгона конвейера, когда кончаютсяпереходные процессы в приводе. Оно обнуляет ячейки памяти, хранящие значения пути и количества циклов измерения скоростидо достижения перемещения в один метр,т,е, 5 - 0 и Ч) - О. Далее с интерваломвводится значение скорости и определяетсяэлементарное перемещение, как Я - Я ++ Ч) Й. Если 5 1, то цикл измерения повторяется. При достижении 8 21 устройствовыходит из цикла и определяет среднюю скорость эа это время Чср -1/)М т,е. среднюю скорость за интервал Т. Далее вводятся мощность привода и линейная нагрузка цп, определяемая весом поступившего 5 груза,Если- 1, т.е. это первый цикл измерения, то устройство возвращается в начало программы (в точку ) и снова вводит значения скорости, линейной нагрузки и мощно сти привода. Далее вычисляется требуемое и действительное тяговое усилие по приведенным формулам при-1 -О, при1- это вес груза, поступившего на конвейертактов назад, Массив чисел, определяющих 15 распределение груза на ленте, занимает ячейку памяти (с нулевой по , С+1 значение заносится в нулевую ячейку, Ь- в первую и т.д. При равенстве действительного и требуемого тягового усилий устройство возвра щается в начало программы. При превышении действительного тягового усилия над требуемым и равенстве усилию резания ленты отключается привод конвейера, Уровень усилия резания зара нее определяется опытным путем и заносится в память ЭВМ. Происходит загрузка или разгрузка, но в любом случае во время резания ленты действительное приращение тягового усилия больше расчетного и таким образом фиксируется этот процесс, Таким образом, устройство фиксирует разрыв длиной в 1 м и более, т.е. минимальная длина разрыва определяется работой весоиэмерительного устройства, периодичностью эап роса и временем обработки информации, зависящими от типа применяемой микроЭВМ,Формула изобретения Способ контроля продольного порыва ленты, включающий измерение линейной нагрузки поступающего грузопотока, о т л ич а ю щ и Я с я тем, что, с целью повышения надежности, измеряют скорость конвейера, мощность привода конвейера, с учетом которых определяют действительное приращение тягового усилия, по линейной нагрузке определяют расчетное приращение тягового усилия, сравнивают действительное и расчетное тяговые усилия и при равенстве или превышении действительнО- го над расчетным формируют сигнал на отключение привода.1 В 71569 Составитель О. КэпканецТехред М. Моргентал Корректор С. Черни Редактор М. Бланар Производственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 Заказ 2797 Тираж 453 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., 4/5
СмотретьЗаявка
4672818, 04.04.1989
КРИВОРОЖСКИЙ ГОРНОРУДНЫЙ ИНСТИТУТ, НОВОКРАМАТОРСКИЙ МАШИНОСТРОИТЕЛЬНЫЙ ЗАВОД
НАЗАРЕНКО ВЛАДИМИР МИХАЙЛОВИЧ, САВИЦКИЙ АЛЕКСАНДР ИВАНОВИЧ, ГОНЧАРЕНКО ГЕННАДИЙ НИКОЛАЕВИЧ, ИЛЬЧЕНКО ЛЮДМИЛА ВЛАДИМИРОВНА, СОЛОХНЕНКО РОБЕРТ ГЕОРГИЕВИЧ, ШОЛТЫШ ВЛАДИМИР ПЕТРОВИЧ
МПК / Метки
МПК: B65G 43/02
Метки: ленты, порыва, продольного
Опубликовано: 23.08.1991
Код ссылки
<a href="https://patents.su/4-1671569-sposob-kontrolya-prodolnogo-poryva-lenty.html" target="_blank" rel="follow" title="База патентов СССР">Способ контроля продольного порыва ленты</a>
Промежуточный привод тяговой цепи конвейера

Номер патента: 1553451
Опубликовано: 30.03.1990
МПК: B65G 23/16
Метки: конвейера, привод, промежуточный, тяговой, цепи
...2, на передних по ходу движения частях оторых закреплены катки 3 и упоры для взаимодействия с элементами тяговой цепи 4 конвейера, и кривошипные направляющие 5 для взаимодействия с катками 3. Нарнирное соединение б крестовин 1 с каждым толкателем 2 расположено в задней по ходу движения части толкателя 2, Упор каждого толкателя 2 выполнен в виде двух вилок 7 с осями 8 и сухарей 9, закрепленных на осях 8 с возможностью ограниченного поворота на них.Устройство работает следующим образом.,Крестовина 1 получает вращательное движение от электродвигателя и через шарнирное соединение б передает двиЖение толкателю 2 с упорами, которые посредством сухарей 9 входят в зацепление с элементом тяговой цепи 4При этом шарнирное соединение 6...
Привод тягового органа конвейера

Номер патента: 606776
Опубликовано: 15.05.1978
Автор: Потапов
МПК: B65G 23/14
Метки: конвейера, органа, привод, тягового
...конвейерв;4 а фиг, 2 разрез А-А фиг. 1; на фиг.- топкатепь,Привод состоит из бесконечных приводных цепей 1, на которых шарнирно установлены топкатепи 2, взаимодействующие с направпяющими 3, скребками 4 и тросом 5 конвейера.Каждый топкатепь 2 имеет паз 6, в ко-. тором установлены пружина 7 и шток 8 сроликом 9. Этот же толкатель имеет приспособление дпя крепления к цепи, выполненное в виде пластины 10, имеющей пальцы 11, служащие для крепления к звену тягового органа 1.Пластина размещена в отверстии 12, в котором имеется пружина 13,В верхней части толкателей 2 жестко укреплены эластичные съемные вкладыши 14. Штоки 8 и пластины 10 имеют упоры 15, входящие в прорези 16 толкателя. 1 о Йля обеспечения прижатия толкателей к тросу на пальцах 11...
Привод тягового органа конвейера

Номер патента: 770946
Опубликовано: 15.10.1980
Авторы: Овсянникова-Трель, Ромашкин, Срибный, Труш, Федоренко, Чувак
МПК: B65G 23/42
Метки: конвейера, органа, привод, тягового
...приводного вала 1 обводной звездочки 2, бесконечной цепи 3, обводной звездочки 4, силового цилиндра 5, установленного между нижней и верхней ветвями цепи 3 при помощи шарнира 6. На конце штока 7 установлен толкающий элемент с верхними и нижними зубьями 8, имекщими нижние 9 и верхние 10 направлякщие поверхности.Привод работает следующим образом.При подаче рабочей жидкости в поршневую полость силового цилиндра 5 шток 7 выдвигается вперед, при этом нижние направляющие поверхности 9 зубьев 8 толкающего элемента скользят по звеньям цепи 3, поворачивая силовой цилиндр 5 вокруг шарнира 6 по часовой стрелке, а верхние зубья входят в зацепление с валиками 11 верхней ветви цепи 3 и перемещают цепь770946 Составитель Г. НенаховЛ. Мозжечкова Техред...
Устройство для контроля перемещения груза на ленте конвейера

Номер патента: 1749135
Опубликовано: 23.07.1992
Автор: Попов
МПК: B65G 47/74
Метки: груза, конвейера, ленте, перемещения
...для контроля попадания камней на ленту. 1 з,й, ф-лы, 4 ил. Устроиство включает смонтированные йа раме 1 над лентой 2 направляющие 3, в которйх с возможностью перемещения расположена поперечина 4 со щитком 5, Перемещение поперечины 4 осуществляется цепной передачей 6 с шестернями 7. Щиток Ь расположен с возможностью взаимодейст вия с концевым выключателем 8 контроля крупных включений в грузе при их скатывэ- (Д нии поленте. Имеется дополнительный кон- (д цевой выключатель 9, расположенный с возможностью взаимодействия с поперечиной 4, Щиток выполнен трапециевидной формы с большим основанием в нижней ча- ф сти, которая армированаэластичным материалом 10 и выполнена с клиновидными выступами 11.При работе конвейера положение щитка 5...
Устройство для защиты привода тягового электродвигателя

Номер патента: 578207
Опубликовано: 30.10.1977
Авторы: Буряк, Петунин, Чернявский
МПК: B60L 15/10
Метки: защиты, привода, тягового, электродвигателя
...переход тиристора 6 и блокирует последний, Для того, чтобы тири- стор 6 не сработал раньше, чем он будет заблокирован, предусмотрен конденсатор 7. При включении импульсного преобразователя 4 в работу на главном тиристоре 11 будут однополярные импульсы регулируемой скваяности, а на коммутирующем конденсаторе 15 - разнополярные импульсы, связанные с зарядом и персзарядом конденсатора,С целью исключения влияния обратного напряжения коммутирующего конденсатора 15 в его цепь контроля введен выпрямитель 13. При нормальной работе преобразователя па главном тиристоре 11 и коммутирующем конденсаторе 15 всегда имеется напряяение, обеспечивающее включение одного из двух или одновременно обоих транзисторов 8 и 9. При переводе тягового...
Предыдущий патент: Устройство управления электроприводом транспортера
Следующий патент: Устройство для очистки конвейерной ленты
Случайный патент: Устройство для контроля утечек газа