Устройство для позиционирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИРЕаЪБЛИН ав аз О 5 и 3/ОО АНИЕ ТЕН(71) Московский инияЮ Л Никол ростроетитут и ршо ювывание сис лирования ни ика,/По ашиност Н ЛЯ ПОЗИЦИОНИРОВ относится к сред правления перем нов приборных и ем и может испол е линейных изме(54) (57) автом нием нолог зоват СТРОЙСТВО Дзобретениетического уабочих оргаческих систся в техник твамщетехьий тока. 4 ил. ГОсудАРстВенный нОмитетПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР К АВТОРСКОМУ СВИДЕ(56) Иванов А.А Проектиртем автоматического манипизделиями. - И.: Иашиност1981, с, 216-228,.Промьпвпенная робототехред. Я.А. Витрина, - М.;ние, 1982, с. 188-209. приборах точной механики и оптики,технологическом оборудовании, в частности в робототехнических устройствах, в качестве однокоординатногомногопозиционного модуля линейныхперемещений. Цель изобретенияшение точности позиционирования. Рляэтого электромеханический исполнительный механизм снабжен пьезопакетом 4 и управляемым захватом 5 поверхности цилиндрической направляющей корпуса, а в блок управления введены ключи 14, 15, двухпороговый компаратор 12, триггер 13, усилитель 16напряжения питания пьезопакета 4 ирелейный элемент 17 включения захвата 5, Такое техническое решение позволяет обеспечить многопозиционныйцикл работы с поддержанием точностипозиционирования в пределах погрешности измерения положения подвижного094 1644Изобретение относится к. средствамавтоматического управления перемещением рабочих органов приборных итехнологических систем и может ис 5пользоваться в технике линейных измерений, приборах точной механикииоптики, технологическом оборудовании,в частности в робототехнических устройствах в качестве однокоординатного 10многопозиционного модуля линейныхперемещений.Цель изобретения - повышение точности позиционирования,На фиг. 1 показано конструктивное 15выполнение устрбйства для позиционирования; на фиг. 2 - пример выполнения управляемого захвата; нафиг, 3 - структурная схема устройства;на фиг. 4 - функциональная схема двух-цпорогового компаратора.Устройство для позиционирования(фиг. 1) содержит корпус 1 с цилиндрической направляющей, подвижный шток2, соединенный с приводом 3, пьезопакет 4 с закрепленным на его базовойторцевой поверхности захватом 5, установленный неподвижно отсчетной поверхностью на подвижном штоке, Захват5 (фиг, 2) выполнен в виде шайбы, внут ри которой установлены пьезокерамические элементы 6 фиксации. При этомзахват 5 взаимодействует с поверхностью цилиндрической направляющей корпуса 1, Положение подвижного штока 2измеряется датчиком 7 положения. Устройство также содержит блок 8 управления, имеющий .измерительный преобразователь 9 датчика положения, элемент 10 сравнения, элемент 11 управ- .40ления приводом, двухпороговый компаратор 12, триггер 13, ключи 14 и 15,усилитель 16 напряжения питания пьезопакета, релейный элемент 17 захвата и задатчик 18 положения,45Устройство работает следующим образом,В исходном состоянии сигнал ошиб. ки на выходе элемента 10 находитсяв пределах от Ппор 1 до П пооа При50этом триггер 13 находится в нулевомсостоянии, Ключ 14 выключен, ключ 15включен, а релейный элемент 17 удерживает захват 5 во включенном состоя-.нии, обеспечивая механическую связькорпуса 1 с подвижным штоком 2 через55пьезопакет 4, При значениях сигналаошибки в пределах от П пор, до Епа 2измеренное с помощью датчика 7 и преобразователя 9 отклонение поступает через замкнутый ключ 15.на входусилителя 16, выходное напряжениекоторого вызывает соответствующее изменение размера пьезопакета 4 в осевом направлении, В результате происходит перемещение отсчетной поверхности пьезопакета, приводящее в движение подвижный шток и регулирующееего положениеЕсли сигнал ошибкипревышает Упорили Б псрг ф компаратор 12 переключает триггер 13 вединичное состояние. При этом происходит быстрое отключение захвата 5,что обеспечивается подачей обратногонапряжения с релейного элемента 17на пьезокерамические элементы б фиксации, .вызывая уменьшение линейногоразмера последних, Одновременно выключается ключ 15,устанавливая пьезопакет в нулевое положение, и включается ключ 14.В результате посредствомэлемента 11 управления и привода 3осуществляется перемещение штока устройства в направлении, зависящем отзнака сигнала ошибки. При достижении сигнала ошибки, соответствующегопороговому значению Поор ипи Ппорг.происходит установка триггера в нулевое положение, в результате чегопривод 3 отключается и включаетсязахват 5 и цепь управления пьезопакетом 4, Устройство переходит в исходное состояние с регулированиемзаданного положения посредством пьезопакета,Предлагаемое техническое решениепозволяет обеспечить многопозиционныйцикл .работы с поддержанием точностипозиционирования в пределах погрешности измерения положения подвижногоштока,формула изобретения Устройство для позиционирования, содержащее электромеханический исполнительный механизм, состоящий из корпуса с цилиндрической направляющей, на которой размещен цилиндрический подвижный шток, соединенный с приводом перемещения подвижного штока и датчиком положения подвижного штока, а также блок управления, содержаций элемент управления приводом перемещения подвижного штока и элемент сравнения, подключенный первым входом к выходу задатчика положе,г 5/У / /7 ния, а вторым входом - к выходу измерительного преобразователя датчикаположения подвижного штока, о т -л и ч а ю щ е е с я тем, что, с целью повышения точности позиционирования, электромеханический исполнительный механизм снабжен пьезопакетоми управляемым захватом поверхностицилиндрической направляющей корпуса,причем пьезопакет установлен вдольнаправления перемещения подвижногоштока, отсчетная поверхность пьезопакета неподвижно соединена с поверхностью подвижного штока, управляемый захват выполнен в виде шайбы спьезокерамическими элементами Аиксации, расположен соосно с цилиндрической направляющей корпуса и закрепленна базовой поверхности пьезопакета,а блок управления снабжен двумя источниками пороговых напряжений, двумя ключами, усилителем напряжения питания пьезоакета, релейным элементомвключения захвата, триггером и двухпороговым компаратором, первый и второй входы которого соединены с выходами соответствующих источников пороговых напряжений, третий вход - свыходом элемента сравнения и с инфор О мационными входами двух ключей, апервый и второй выходы - с соответствующими входами триггера, соединенного первым выходом с управляющим входомпервого ключа, подключенного выходом к 15 входу элемента управления приводом перемещения подвижного штока, а вторымвыходом - с входом релейного элементавключения захвата и управляющим входомвторого ключа, подключенного выходом квходу усилителя напряжения питанияпьезопакета.+ орректор Л.1 н ковецкая Редакт 11 Иоизводственно-издательский комбинат Патент , г. Ужгоро Гагарин ставителя В, Прями хред Л.Сердюкова аказ 1240 Тираж 468 НИИПИ Государственного комитета по изобретениям и 113035, Москва, Ж, Раушская наб Подписноекрытиям при ГКНТ СССд. 4/5
СмотретьЗаявка
4609464, 17.10.1988
МОСКОВСКИЙ ИНСТИТУТ ПРИБОРОСТРОЕНИЯ
НИКОЛАЕВ ЮРИЙ ЛЬВОВИЧ, ЕРШОВ АЛЕКСАНДР ГРИГОРЬЕВИЧ, СМИРНОВ ВЛАДИМИР АЛЕКСЕЕВИЧ, ПЕТРОВ ОЛЕГ ИВАНОВИЧ
МПК / Метки
МПК: G05D 3/00
Метки: позиционирования
Опубликовано: 23.04.1991
Код ссылки
<a href="https://patents.su/4-1644094-ustrojjstvo-dlya-pozicionirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для позиционирования</a>
Устройство для одновременного контроля положения нескольких перемещающихся элементов

Номер патента: 1137395
Опубликовано: 30.01.1985
Авторы: Данилов, Трахтенгерц
МПК: G01P 13/04, G05G 15/04
Метки: нескольких, одновременного, перемещающихся, положения, элементов
...с двумя выступами, попеременно сопрягамыми со штырями соответствующего перемещающегося элемента.На фиг. 1 показано устройство, общий вид; на фиг, 2 - разрез А-А на Фиг. 1; на фиг. 3 - вид Б на фиг.2.Устройство для одновременного контроля положения нескольких перемещающихся элементов содержит уста- новленную в корпусе 1 подпружиненную поворотную штангу 2 с жестко установленными на ней поводками 3, сопряженными со штырями 4 перемещающихся элементов 5 и 6. Устройство снабжено кронштейном 7, жестко связаннымс одним из перемещающихся элементов 5, пружина 8 поворотной штанги 2 установлена между кронштейном 7 иповодком 3, сопряженным с указаннымперемещающимся элементом 5, Каждый поводок 3 выполнен с двумя выступами 9 и 10, попеременно...
Устройство для захвата, хранения и освобождения цилиндрических изделий

Номер патента: 763221
Опубликовано: 15.09.1980
Авторы: Велигоцкий, Гапанюк, Козлов, Коновалов
МПК: B65G 47/00
Метки: захвата, освобождения, хранения, цилиндрических
...рычагов 10.Загрузочный стол 14 имеет рольганг 15, перемешаюшийся вертикально пневмоцилиндром 16, установленным на неподвижном основании 17, На основании 17 жестко смонтио рован упор 18, обеспечиваюший центровку цилиндрических изделий, например велошин 19; на участке разгрузки установлен копир 20, выполненный в виде штанги с пневмоцилиндром 21.Автоматическое устройство работает следуюшим образом.По ходовому пути 1 посредством тягового элемента 2 двигаются ходовые каретки 3 с шарнирно закрепленными рычажными подвесками 4. Несколько неотцентрированных велошин 19, уложенных в стопу по роль- гангу 15, подают на загрузочный стол 14 и останавливают упором 18. В момент подхода рычажной подвески 4 к центру загрузочного стола 14 конвейер...
Устройство формирования сигнала положения системы позиционирования
Номер патента: 1314382
Опубликовано: 30.05.1987
Авторы: Кривецков, Мерзляков, Столяров, Стукалов
МПК: G11B 21/04
Метки: позиционирования, положения, сигнала, системы, формирования
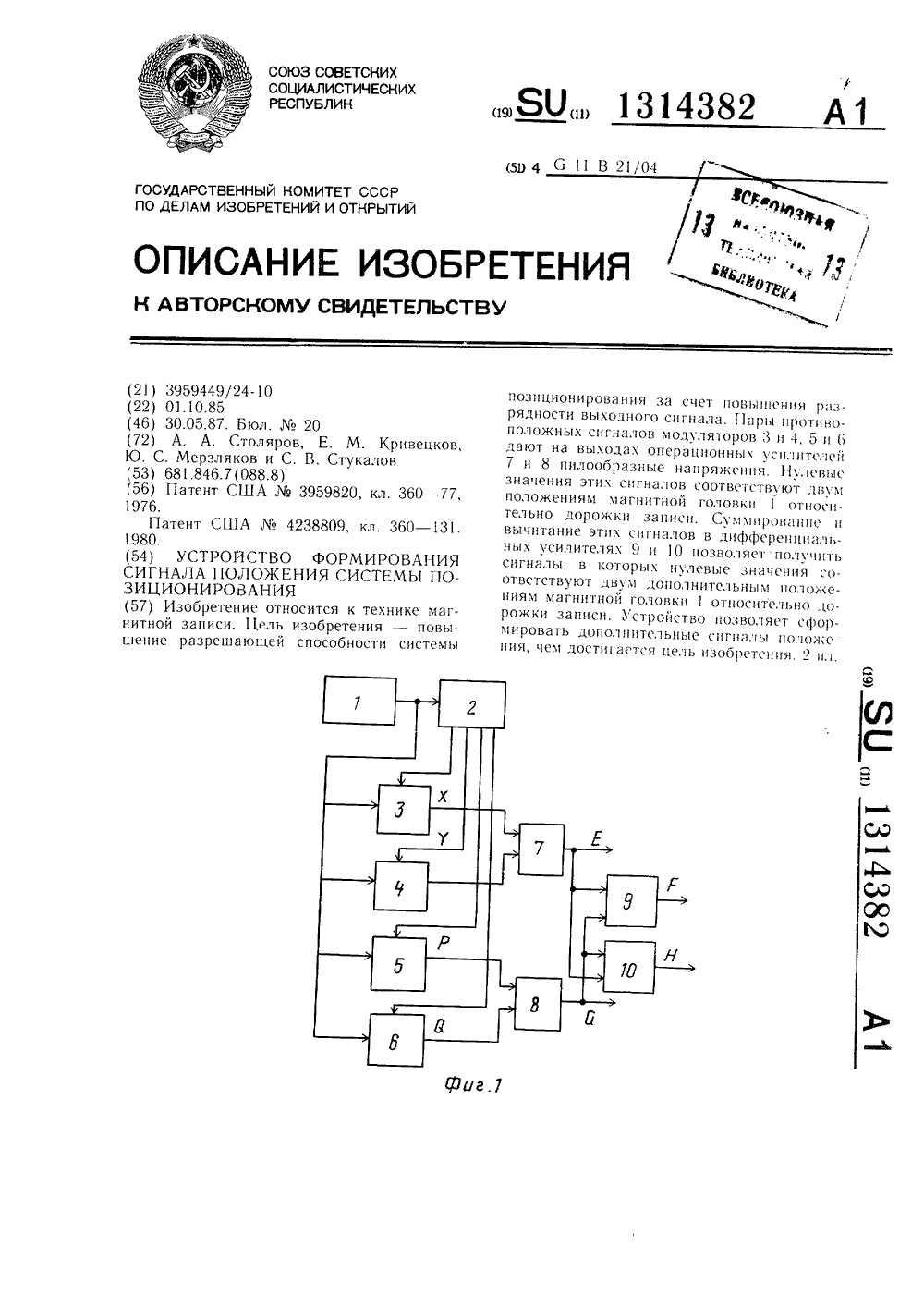
...разредающей способности системы позициониро 5 вания за счет повышения разрядности сформированного сигнала.На фиг. 1 показана функциональная схема устройства; на фиг. 2 -- временная диаграмма выходных сигналов при переме шенин магнитной головки вдоль радиуса дискового магнитного носителя.Устройство содержит магнитную головку 1, генератор 2 стробирующих импульсов, демодуляторы 3 - 6, операционные усинлители 7 и 8, суммирующии и вычитаю 15 гций дифференциальные усилители 9 и 10 соответственно.Устройство работает следующим образом.Магнитная головка 1 имеет длину рабочего зазора, равную ширине двух дорожек на которых записаны четыре типа фазомодулироваццых сигналов. Поэтому сигнал, воспроизведенный магнитной головкой 1, демоду...
Захват манипулятора для ферромагнитных цилиндрических изделий

Номер патента: 1224130
Опубликовано: 15.04.1986
Авторы: Буженецкий, Климович, Подлужный, Тихончук
МПК: B23K 37/04, B66C 1/06
Метки: захват, манипулятора, ферромагнитных, цилиндрических
...рычагов 34 и38, и пружины сжатия 48, установленные между концами штоков 46 ивтулками 47. На штоках 46 между пневмоцилиндром 45 и втулками 47 закреи -лены упоры 49.На оси 37 закреплена с возможностью поворота направляющая 50, вкоторой расположен подвижный камень(не показан), шарнирно связанный состержнями равной длины 51, расположенньц" концы которых шарнирно закреплены на рычагах 34 и 38 в точках,равноудалецных от оси 37,Захват манипулятора работает следующим образом,При помощи механизма 2 перемещениязахвата последний, с отключенныьщэлектромагнитами 29 и 30, располагаютнад конвейером с изделиями, подлежащими обработке. Подавая воздух в пнев-моцилиндр 35, разводят рычаги 34 и38,. Движение поршней со штоками 4 б25 35 передается через...
Способ перемещения элементов машнн по направляющим скольжения

Номер патента: 177263
Опубликовано: 01.01.1965
Автор: Равва
МПК: B23Q 11/04
Метки: машнн, направляющим, перемещения, скольжения, элементов
...перемещающегося элемента машины, точность его положения и перемещения, а также увеличивается срок службы направляющих. Указанные преимущества имеют место при любых впец 1 них взаимодействиях (нагрузке, температуре, скорости движения и т, д.) на перемещающийся элемент машины, а также при любом пространственном расположении его направляющих. Используемое в данном случае одновременное регулирование усилия разгрузки по скорости повышает качество регулирования в переходных режимах движения элемента машины. Способ может быть осуществлен различными путями, в частности разгружающее усилие создается любым методом, например гидрав лическим. Процесс регулирования толщинысмазочного слоя на сответствующем участке направляющих может проводиться с...
Предыдущий патент: Устройство для централизованного контроля параметров
Следующий патент: Способ регулирования линейной плотности волокнистого продукта
Случайный патент: Линейный коллектор фракций для жидкостного хроматографа