Стенд для испытания роботов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1281404
Авторы: Мартынов, Нирман, Седлер, Штейнгардт

Текст
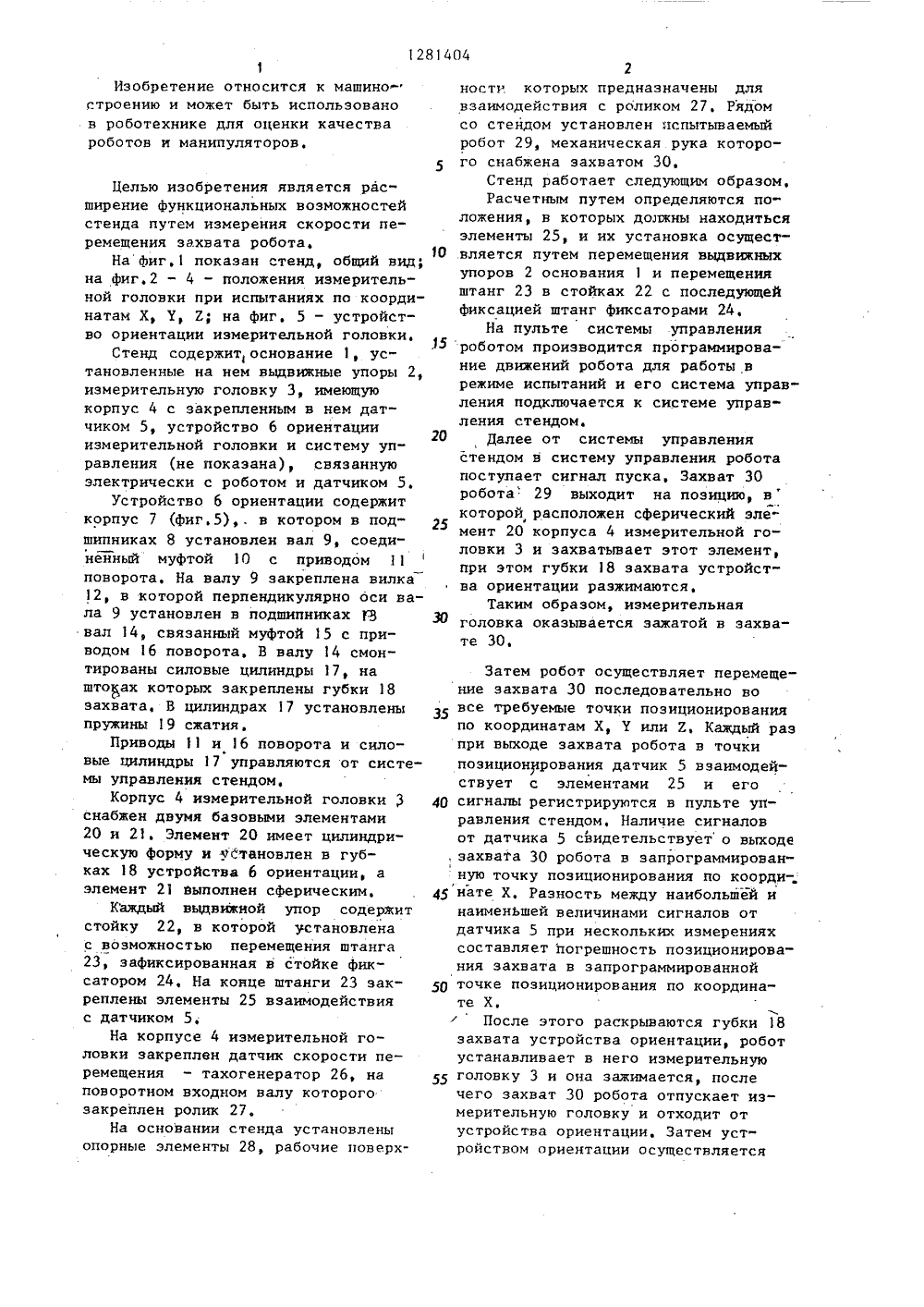
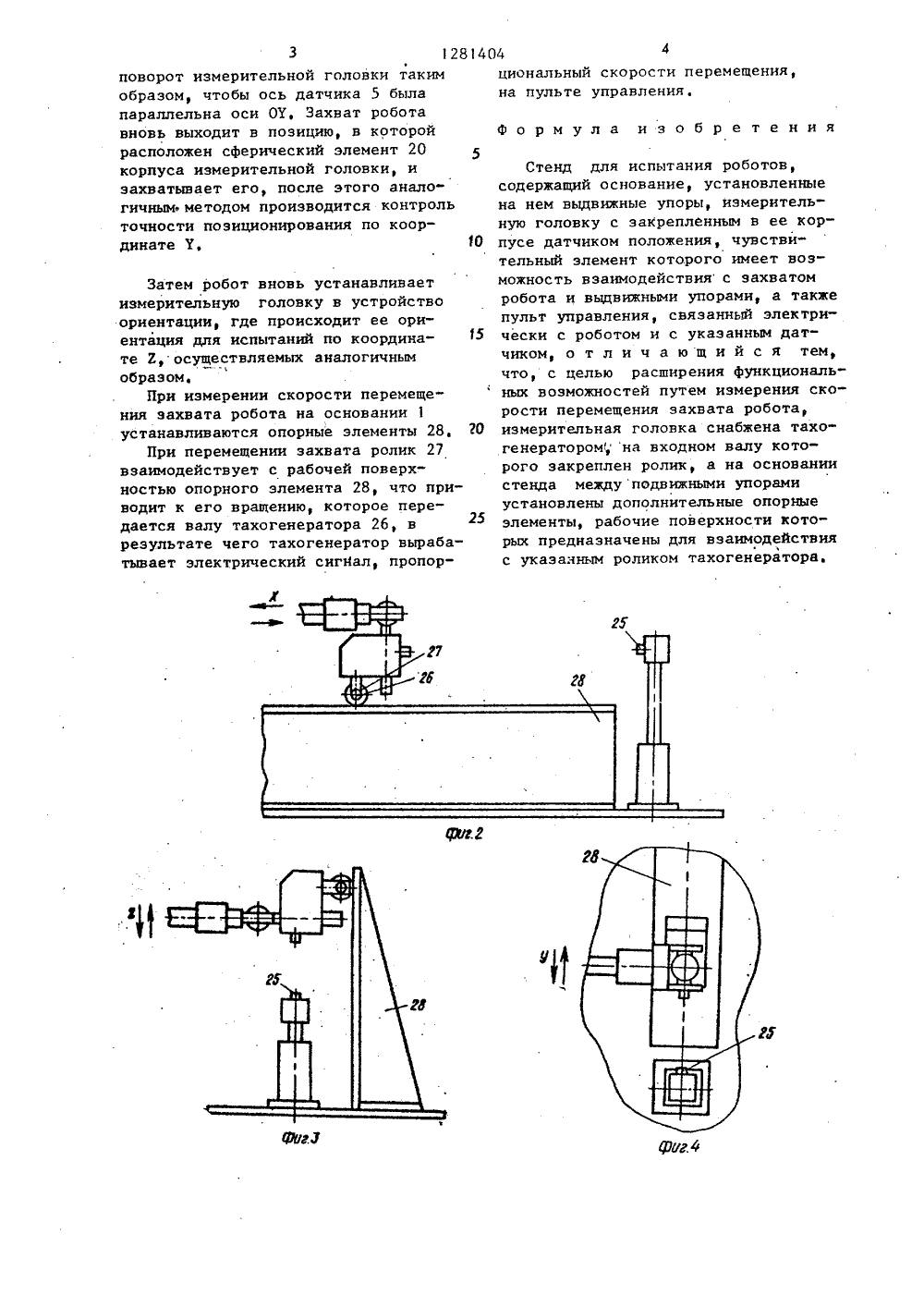
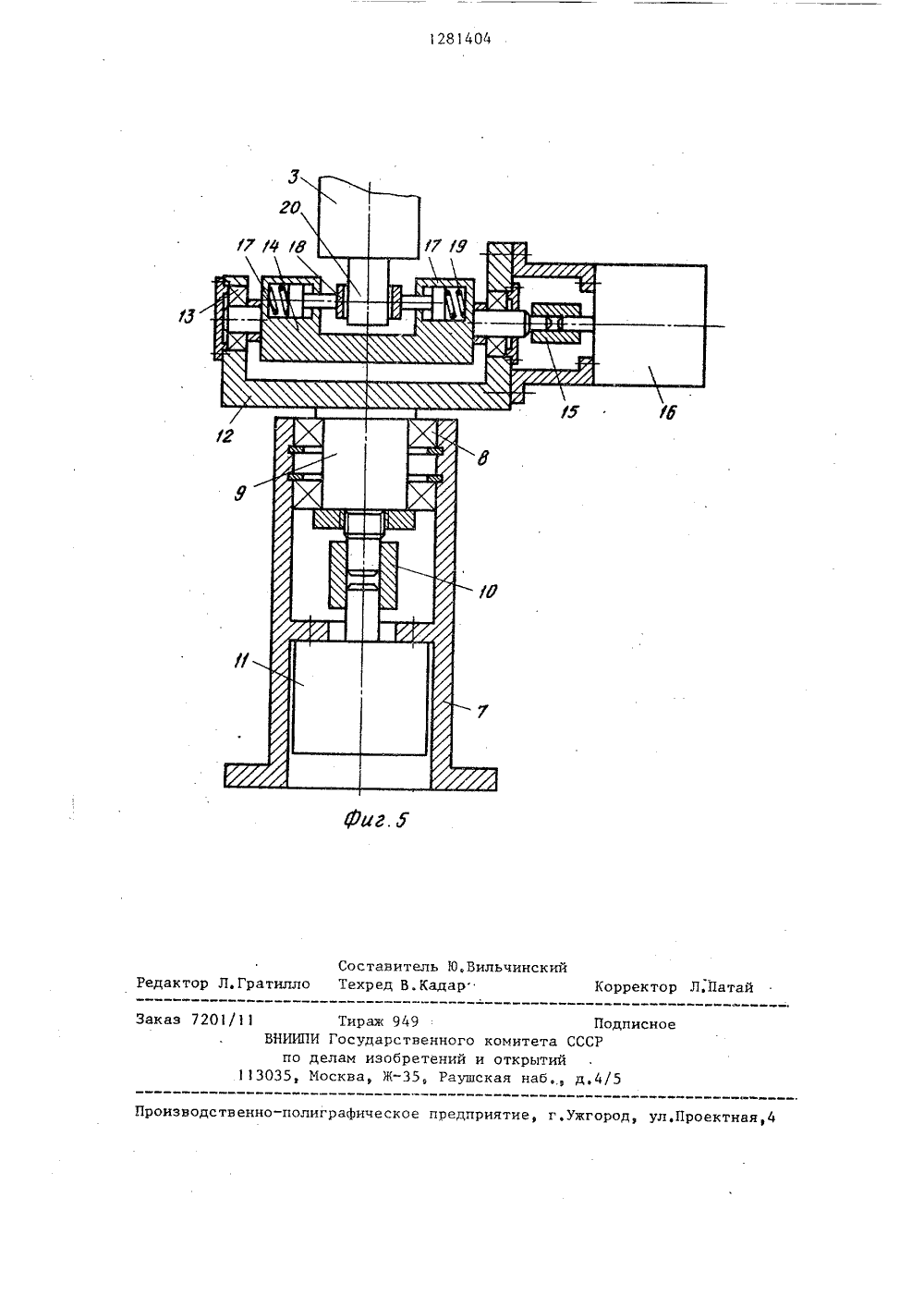
СОЮЗ СОВЕТСНИХИЦВЛЮНЕПВКРЕСПУБЛИК 09) (11) 4 А 1 Д 11/00 ПИСАНИЕ ИЗОБРЕТЕНИЯ ИДЕГЕЛЬСТВУ ОСУДАРСТВЕННЫЙ НОМИТЕТ СССПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТ(71) Всесоюзный проектно-конструкторский институт технологии электротехнического производства(54) СТЕНД ДЛЯ ИСПЫТАНИЯ РОБОТОВ(57) Изобретение относится к робототехннке и м,б. использовано дляоценки качества роботов, Целью изобретения является расширение функциональных возможностей стенда, Стенд содержит основание. 1, установленные на нем выдвижные упоры 2, измерительную головку 3 с датчиком 5, устройст- во ее ориентации б, установленное на основании, и систему управления. На концах упоров 2 закреплены элементы 25 взаимодействия с датчиками 5. На корпусе 4 измерительной головки зак реплен датчик скорости перемещения (тахогенератор) на поворотном входном валу которого закреплен ролик. На основании стенда установлены опорные элементы, рабочие поверхности которых предназначены для взаимодействия с роликом. Рядом со стендом установлен испытываемый робот . 29, механическая рука которого снабжена захватом .30. 5 ил.1Изобретение относится к машиностроению и может быть использованов роботехнике для оценки качествароботов и манипуляторов,Целью изобретения является расширение функциональных возможностейстенда путем измерения скорости перемещения захвата робота,На фиг,1 показан стенд, общий вид,на фиг.2 - 4 - положения измерительной головки при испытаниях по координатам Х, У, 2; на фиг, 5 - устройство ориентации измерительной головки.Стенд содержит, основание 1, установленные на нем выдвижные упоры 2,измерительную головку 3, имеющуюкорпус 4 с закрепленным в нем датчиком 5, устройство 6 ориентацииизмерительной головки и систему управления (не показана), связаннуюэлектрически с роботом и датчиком 5.Устройство 6 ориентации содержиткорпус(фиг.5),. в котором в подшипниках 8 установлен вал 9, соединенный муфтой 10 с приводом 11поворота. На валу 9 закреплена вилка12, в которой перпендикулярно оси вала 9 установлен в подшипниках Щвал 14, связанный муфтой 15 с приводом 16 поворота, В валу 14 смонтированы силовые цилиндры 17, наштоах которых закреплены губки 18захвата, В цилиндрах 17 установленыпружины 19 сжатия,Приводы 11 и 16 поворота и силовые цилиндры 17 управляются от системы управления стендом,Корпус 4 измерительной головки 3снабжен двумя базовыми элементами20 и 21. Элемент 20 имеет цилиндрическую форму и ФСтановлен в губках 18 устройства б ориентации, аэлемент 21 выполнен сферическим.К:юкдый выдвижной упор содержитстойку 22, в которой установленас возможностью перемещения штанга23, зафиксированная в стойке фиксатором 24, На конце штанги 23 закреплены элементы 25 взаимодействияс датчиком 5.На корпусе 4 измерительной головки закреплен датчик скорости перемещения - тахогенератор 26, наповоротном входном валу которогозакреплен ролик 27.На основании стенда установленыопорные элементы 28, рабочие поверхности которых предназначены длявзаимодействия с роликом 27. Рядомсо стендом установлен испытываемыйробот 29, механическая рука которого снабжена захватом 30,Стенд работает следующим образом,Расчетным путем определяются положения, в которых должны находитьсяэлементы 25, и их установка осущестЮ вляется путем перемещения выдвижныхупоров 2 основания 1 и перемещенияштанг 23 в стойках 22 с последующейфиксацией штанг фиксаторами 24,На пульте системы управления15 роботом производится программирование движений робота для работы врежиме испытаний и его система управления подключается к системе управления стендом,20 Далее от системы управлениястендом в систему управления роботапоступает сигнал пуска, Захват 30робота 29 выходит на позицию, вкоторой расположен сферический эле"мент 20 корпуса 4 измерительной головки 3 и захватывает этот элемент,при этом губки 18 захвата устройст"ва ориентации разжимаются,Таким образом, измерительнаяголовка оказывается зажатой в захвате 30.Затем робот осуществляет перемещение захвата 30 последовательно вовсе требуемые точки позиционированияпо координатам Х, У или 2, Каждый разпри выходе захвата робота в точкипозиционирования датчик 5 взаимодействует с элементами 25 и его 40 сигналы регистрируются в пульте управления стендом. Наличие сигналовот датчика 5 свидетельствует о выходе, захвата 30 робота в запрограммированную точку позиционирования по коорди-.45 нате Х. Разность между наибольшей инаименьшей величинами сигналов отдатчика 5 при нескольких измеренияхсоставляет погрешность позиционирования захвата в запрограммированной 50 точке позиционирования по координате Х,После этого раскрываются губки 18захвата устройства ориентации, роботустанавливает в него измерительную 55 головку 3 и она зажимается, послечего захват 30 робота отпускает измерительную головку и отходит отустройства ориентации. Затем устройством ориентации осуществляется12814поворот измерительной головки таким образом, чтобы ось датчика 5 была параллельна оси ОУ, Захват робота вновь выходит в позицию, в которой расположен сферический элемент 20 корпуса измерительной головки, и захватывает его, после этого аналогичнымметодом производится контроль точности позиционирования по координате У,Затем робот вновь устанавливаетизмерительную головку в устройствоориентации, где происходит ее ориентация для испытаний по координате Е, осуществляемых аналогичнымобразом,При измерении скорости перемеще"ния захвата робота на основании 1устанавливаются опорные элементы 28,При перемещении захвата ролик 27взаимодействует с рабочей поверхностью опорного элемента 28, что приводит к его вращению, которое передается валу тахогенератора 26, врезультате чего тахогенератор вырабатывает электрический сигнал, пропор 15го25 04 4 циональный скорости перемещения, на пульте управления,Формула изобретенияСтенд для испытания роботов, содержащий основание, установленные на нем выдвижные упоры, измерительную головку с закрепленным в ее корпусе датчиком положения, чувствительный элемент которого имеет возможность взаимодействия с захватом робота и выдвижными упорами, а также пульт управления, связанный электрически с роботом и с укаэанным датчиком, о т л и ч а ю щ и й с я тем, что, с целью расширения функциональных возможностей путем измерения скорости перемещения захвата робота, измерительная головка снабжена тахо- генератором,на входном валу которого закреплен ролик, а на основании стенда между подвижными упорами установлены дополнительные опорные элементы, рабочие поверхности которых предназначены для взаимодействия с укаэанным роликом тахогенератора,4/ Производственно-полиграфическое предприятие, г.ужгород, ул,Проектна Тираж 9 ИИПИ Государс по делам изоб 5, Москва, Жкомитетаи открытийская наб ПодписноеСР
СмотретьЗаявка
3955831, 12.08.1985
ВСЕСОЮЗНЫЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ ИНСТИТУТ ТЕХНОЛОГИИ ЭЛЕКТРОТЕХНИЧЕСКОГО ПРОИЗВОДСТВА
СЕДЛЕР МИХАИЛ ХАИМОВИЧ, МАРТЫНОВ ВИКТОР СЕРГЕЕВИЧ, ШТЕЙНГАРДТ ЕЛЕНА РОБЕРТОВНА, НИРМАН АРКАДИЙ ЮРЬЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: испытания, роботов, стенд
Опубликовано: 07.01.1987
Код ссылки
<a href="https://patents.su/4-1281404-stend-dlya-ispytaniya-robotov.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытания роботов</a>
Трехкоординатная измерительная головка

Номер патента: 1471059
Опубликовано: 07.04.1989
Авторы: Долдырев, Домнич, Нефедов
МПК: G01B 5/012
Метки: головка, измерительная, трехкоординатная
...г.ужгород, ул. Гагарина, 101 Изобретение относится к измерительной технике и предназначено для измерения профилей сечения сложных деталей.Целью. изобретения является упроще 5 ние конструкции.На чертеже изображена трехкоорди" натная измерительная головка, общий виде10Трехкоординатная измерительная головка содержит корпус 1 с крышкой 2, установленные в нем измерительный шток 3 с наконечником 4, датчики 5 перемещений с чувствительными элемен тами Ь, крестовину 7, узел создания измерительного усилия, состоящий из пружин 8. В корпусе 1 выполнена сфе" рическая полость с размещенной в ней полой сферой, образующие шаровой шарнир 9, в полости которого размещены датчик 5 перемещения, измерительный .шток 3, шарики 1 О, шайбы 11 и пружина 8,...
Измерительная головка

Номер патента: 1601502
Опубликовано: 23.10.1990
Авторы: Аскарходжаев, Клишин, Фесенко
МПК: G01B 5/012
Метки: головка, измерительная
...головка содержит корпус с фланцем, измерительный рычаг с наконечником на одном конце и грибком на другом, пружину для поджатия грибка к фланцу и измерительный преобразователь с упругим элементом, который соединен с центральной частью грибка с помощьюгибкой нерастяжимой нити . 3 ил. вижным контактом 9, размещенным на упругом элементе - пластине 10. Пластина 10 соединена с грибком 5 с помощью гибкой нерастяжимой нити 11, Центрирование грибка 5 в корпусе 1 осуществляется по кромке 12 грибка 5, выполненной в виде части сферы. Пля предотвращения поворота измерительного рычага 3 вокруг своей оси концы пружины 6 закреплены на грибке 5 и корпусе 1. Усилие пружины 6 больше усилия упругой пластины 10.Измерительная головка работает следующим...
Фиксатор для перемещения головки головчатой кости

Номер патента: 279887
Опубликовано: 01.01.1970
Автор: Ашкенази
МПК: A61B 17/56
Метки: головки, головчатой, кости, перемещения, фиксатор
...фиксаторам для перемещения головки головчатой кости.Известны хирургические инструменты для ортопедических целей, содержащие рукоятку овальной формы и уплощенную рабочуо часть. Этп инструменты, оснащеппыс однозубым крючком, практически пе могут быть использованы для перемещения головки головчатой кости.Целью изобретения является прсдупреждеразмозженпя губ 1 того вещества кости и повреждения суставного хряща. Для этого рабочая часть фиксатора оснащена съемным двузубым захватом,На чертеже изображен фиксатор, общий вид.Он содержтгг рукоятку 1 овальной формы и съемный двузубый захват 2, располокенный на уплощспой рабочей части инструмента.При опсрацпи удаляют разрупснпуо полулунпую кость и извлекаот остеотомпровянпую головку головчатой...
Устройство для перемещения головки звукоснимателя

Номер патента: 511624
Опубликовано: 25.04.1976
Авторы: Грошев, Корбаков, Шаверин
МПК: G11B 3/10
Метки: головки, звукоснимателя, перемещения
...головки звукоснима еля, которое обеспечввало бы уменьшение искажений результата воспроизведения. 5 Предлагаемое устройство содержит первую рейку 1, на одном конце которой установлен балансир 2.,Цругой конец первой рейки 1 шарнирно соединен с держателем 3 головки 4 звукоснимателя в плоскости колебаний воспроизводящей иглы 5. Первая рейка 1 укреплена на первом валу 6, установленном с возможностью вращения в поворотном элементе 7, вторую рейку 8, шарнирно соединенную с держателем 3 головки 4 звукоснимателя и с рычагом 9, жестко связанным с первым зубчатым колесом 10. Первое зубчатое колесо 10 установлено на511624 Составитель р.эьзвновТерел И Карандашова КорРектоР Е Заказ 59 т 9 Изл. М ЩЯ ЦНИИПИ Государственного комитета Совета Министров...
Устройство для перемещения головки звукоснимателя

Номер патента: 627512
Опубликовано: 05.10.1978
Авторы: Кочикян, Мкртчян, Саакян, Степанян
МПК: G11B 3/10
Метки: головки, звукоснимателя, перемещения
...и установленный с возможностью поворота вокруг осн, перпендикулярной оси поворота вала, на котором укреплен соединительный элемент, пружину и регулятор 2. Это устройство обеспечивает компенПредлагаемое устройство содержит тонарм 1, один юнец которого соединен с головкой звукоснимателя 2. На другом конце тонарма 1 установлен противовес 3, положение которого можно изменять. Тонарм установлен с возможностью ново рота вокруг оси, перпендикулярной оси поворота вала 4. Последний установлен в юрпусе 5 и укреплен в соединительном элементе 6, который выполнен с кулачковой поверхностью и снабжен сопряженной с ней нитью 7, соединенной через пружину 8 с регулятором 9,1Р 1 э; ( 512 Составитель Ю.-К. В. РозенкранцТехред Е, Давидович Корректор...