Устройство контроля перемещения механических узлов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1276996
Автор: Никольский




Текст
, 12769 А 19) 8 1 С О Р 13/О ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИЕ ИЗОБРЕТЕН ПЬСТВУ А ВТОРСНОМУ СВИ относится к устроиа перемещением под и позволяет упросустройства при по(57) Изобретениствам контролявижных объектовтить конструкци юл.46кий.8)ции2323151,1977.и2201467,1974.КОНТРОЛЯ ПЕРЕМЕЩЕНОВ выщении надежности его эксплуатации.Устройство содержит тактовый генератор 1, элементы И 2,3,6,15,16,22 и25, регистры 4 и 19 сдвига, индикатор 5, формирователи 7,17,21,23,24,26,27 и 28 импульсов, элемент И-НЕ8 и 9, контакты 12 и 13, элементИЛИ 14, элемент НЕ 18 и КБ-триггер20. Введение новых элементов и образование новых связей между элементами устройства позволяет проводитьконтроль перемещения механизмов загрузки - выгрузки диффузионного оборудования производства кремниевыхпластин. 2 ил.1 12Изобретение относится к устройствам контроля за перемещением подвижных объектов и может быть использовано для контроля поступательного движения механических узлов.Цель изобретения - упрощение конструкции устройства при повышениинадежности его эксплуатации,На фиг.1 приведена функциональнаясхема предлагаемого устройства,", нафиг,2 - возможная конструкция импульсного датчика перемещения, выполненного в виде рейки с токопроводящимрисунком.Устройство содержйт тактовый генератор 1, первый 2 и второй 3 элементы И, первые входы которых соединеныс выходом тактового генератора 1,первый регистр сдвига 4, вход синхронизации которого соединен с выходомпервого элемента И 2, а один из еговыходов соединен с индикатором 5,третий элемент И 6, выход которого через первый формирователь импульсов 7соединен с входом установки в тт 0"первого регистра сдвига 4, элементыИ-НЕ 8 и 9, выходы которых подключены к входам третьего элемента И 6,рейки с токопроводящим рисунком 10 и11, взаимодействующие соответсгвеннос контактами 12 и 13, соединенные скорпусом контролируемых узлов, элемент ИЛИ 14, четвертый 15 и пятый 16элементы И, выходы которых соециненыс первым и вторым входами элементаИЛИ 14 и со вторыми входами элементов И-НЕ 9 и 8 соответственно, второй формтрователь импульсов 17, эле.мент НЕ 18, выход которого соединенс первым входом пятого элемента И 16а вход соединен с входом второгоформирователя импульсов 17 и с первым входом четвертого элемента И 15,второй вход которого соединен с первым входом пятого элемента И 16, вторым входом первого элемента И 2 и содним из выходов второго регистрасдвига 19, вход синхронизации которого соединен с выходом второго элемента И 3, второй вход которого соединен с выходом ВБ-триггера 20, входК которого через третий формирователь импульсов 21 соединен с гыходомэлемента ИЛИ 14, а вход Б КБ-триггера 20 подключен к выходу шестого элемента И 22, первые два входа подкгпочены к выходам четвертого 23 и пятого 24 формирователей импульсов а40 5 О 55 концевых датчиков необходимо производттть в следующем порядке: к формирователям 26 и 28 гтодключают концевьте датчики подвижного элемента, перемещение которого н соответствии спроизводственным цикгтом выполняетсяпервым, причем к элементу 28 подключается датчик его исходного положения, а к формирователю 2 о - датчикего конечного положения (при,прямом перемещении элемента). К фортотрователям 17 и 27 годключатот датчикиподвижного элемента, перемещение которогс производится после перемещения первого подвижного элемента, причем к формирователк 27 подключаетсядатчик конечного положения, а к формирователю 17 - датчик исходного положения,769962третий и четвертый входы шестого элемента И 22 соединены с первым и вторым входами седьмого элемента И 25 и подключены к входам второго 17 и шестого 26 формирователей импульсов соответственно, а третий и четвертый входы седьмого элемента И 25 подключены соответственно к выходам седьмого 27 и восьмого 28 формирователей импульсов,Устройство работает следующим образом.Перед работой необходимо установить рейки вдоль линии перемещения контролируемого узга, причем каждая рейка предназначена. для контроля за одним движутттимся эг:ементом, На каждый движущийся элемент устанавливается контакт, например, в виде медной пластинки с выступом на конце дня контактирование с рейкой, который соединястся с корпусом контролируемого узла Корпус узла необходимо подклточить к общему выводу источ - ника питания для данного устройства.формирователи импульсов 23 и 24 необходимо подключить к цепям команд на перемещение узлов (одна команда на прямое перемещение, другая на обратное). К формирователям 17, 26, 27 и 28 необходимо подключить конттевые датчики контролируемых узлов.Обычно такие датчики уже имеются в конструкции пот 1 вижньтх узлов для ограничения длины пе 1 темещения (если нет, то их необходимо поставить), Конструкция их может быть самая различная (электрокон.актные, магнитоуправляемые и т.д.,т. ПодклточениеПри подаче команды на начало цикла перемещения формирователь импульсов 23 выдает отрицательный импульс через элемент И 22 на вход Б КБ-триггера 20, выход которого устанавливается в состояние "1", При наличиина выходе КБ-триггера 20 элемент И 3 пропускает тактовую частоту с генератора 1 на вход С регистра сдвига 19, который находится в режиме О сдвига. для чего на его управляющие входы поданы соответствуюшие уровни. Через некоторое время на его выходе появляется сигнал "1", который через элемент И 2 разрешает прохождение 5 импульсов с тактового генератора 1 на С вход регистра сдвига 4, также установленного в режиме сдвига. Кроме того, сигнал "1" с выхода регистра 19 через элемент И 16 разрешает 20 прохождение с рейки 10 через элементы И-НЕ 8, И 6, формирователь 7 на К вход регистра сдвига 4. Рейка 11 в данном случае отключена запрещающим сигналом с концевого датчика, подключенного к формирователю 17 (датчики при срабатывании должны выдавать 0 уровень). При перемещении контролируемого элемента вместе с ним начинает перемещаться по рейке 10 контакт ЗО 12, который замыкает прямоугольные зубья на корпус, При этом на вход элемента 8 поступает последовательность импульсов, которая проходит черех элемент 6 и формирователь 7 на вход регистра сдвига 4 и периодически обнуляет его. Частота генератора 1 и шаг зубьев выбирается таким образом, чтобы время заполнения разрядов регистра 4 было больше периода 40 следования импульсов с, рейки при минимальной скорости движения контролируемого узла. Уровень "1" с выхода регистра 19 через элемент 16 поступает на один из входов элемента 14 и с 5 его выхода на формирователь 21, который выдает отрицательныйимпульс на Р. вход КБ-триггера 20 и устанавливает последний в 0" состояние, тем самым останавливая регистр 19, Это позвоняет осуществить задержку от момента подачи команды до начала движения контролируемого элемента. Задержка позволяет исключить ложное срабатывание индикатора в момент, когда ко.манда пришла, а движение че началось, так как до начала поступательного движения контролируемого узла возможны вспомогательные движения в узлах, например, передачи движения от двигателя до исполнительного элемента.Если контролируемый узел остановится, то на К вход не будут приходить сбрасывающие импульсы и регистр 4 заполнится, На его выходе появляется уровень "1", который включает индикатор 5. При восстановлении движения регистр обнуляется и индикатор выключается. Когда первый контролируемый узел дойдет до своего крайнего положения срабатывает его конечный датчик, подключенный к формирователю 26, который в свою очередь выдает отрицательный импульс. Этот импульс через элемент 25 проходит на К вход регистра 19 и устанавливает его в исходное положение, Кроме того, этот импульс через элемент 22 вводит КБ-триггер 20 и повторяется работа регистра 19, который обеспечивает задержку на период подготовки движения второго элемента. При начале его движения включается датчик исходного положения, подключенный к элементу 18 и отключает через элемент 16 рейку 10, а через элемент 15 подключает рейку 11. Триггер 20 сбрасывается в "0" сигналами с регистра 19 и датчика исходного положения второго перемещаемого элемента через второй вход элемента 14 и формирователь 21. Контроль перемещения второго элемента осуществляется таким же образом, как и первого до достикения им конечного положения, при котором с его конечного датчика через Формирователь 27 и элемент 25 сбрасывается регистр 19, и прекращается процесс контроля. При обратном перемещении порядок движения узлов обратный: сначала движется второй элемент, а потом первый. Процесс контроля осуществляется аналогично контролю при прямом перемещении по команде, поступающей через формирователь 24. Перезапуск схемы с контроля второго элемента на контроль первого осуществляется при срабатывании датчика исходного положения второго элемента через Формирователь 17, апрекращение контроля происходит при срабатывании датчика исходного положения через формирователь 28.ЮББ,ЛБЯБ оставитель Ю,Мручкоехред П.Сердюкова Корректор Е.Рошкс дактор В.Ковт аказ 6661/3 к 778 Ти Подписцскомитета СССРи открытийаушская наб., д ВНИИП п 1130осударствецног лам изоМосква ретениЯ,роизводственно-полиграфическое предприятие, г.ужгород,ул,Проектная,4 5 12Элементы схемы обработки сигнала предлагаемого устройства могут быть выполнены на любых ИС, например серии К 155, Индикатор может быть использован любой при соответстветствующем сопряжении выходного уровня регистра и входного уровня индикатора. Рейки могут быть выполнены из фольгированного стеклотекстолита, а рисунок на них может быть выполнен травлением. Формула изобретения Устройство контроля перемещения механических узлов, содержащее модулирующий элемент, импульсный датчик перемещения, сопряженный с модулирующим элементом, схему обоаботки сигнала и индикатор, о т л и ч а ющ е е с я тем, что, с целью упрощения конструкции при повышении ее надежности, схема обработки сигнала содержит регистры сдвига формирователи импульсов, КБ-триггер элементы И,И-НЕ, ИЛИ, НЕ и тактовый генератор, выход которого подключен к первым входам первого и второго элементов И, выход первого из которых подключен к входу синхронизации первого регистра сдвига, к выходу которого подключен индикатор, а к Р,- входу регистра сдвига через первый 76996формирователь импульсов годключен выход третьего элемента И, к входам которого подключены выходы эпементовИ-НЕ, первые входы которых подключены к импульсным датчикам перемещения,а вторые входы - к входам элементаИПИ и к выходам чет зертого и пятогоэлементов И, причем первый вход четвертого элемента И 1 оедицец с входом 10 второго формирователя импульсов и свходом элемецт. НЕ, выход которого подключен к первому входу пятого элемента И, а вторые входы четвертого и пятого элементов И соединены с вторым входом первого элемента И и с выходом второго регистра сдвига вход синхронизации которого соединен с выходом второго элемента И, второй вход которого подключен к выходу Б.Б-триг Ю гера, вход которого через третий формирователь импульсов подключен к выходу элемента И.И, а Б-вход подключен к выходу шесто;о элемента И, первые два входа которого подключены соот - 25 ветственцо к выходам четвертого и пятого формирователей импульсов, а третий и четвертый входы - к выхо - дам второго и шестого формирователей импульсов и к первому и второму входам седьмого и восьмого формирователей импульсов, а, выод седьмого элемента И подключец к К-.входу второго регистра сдвига.
СмотретьЗаявка
3876148, 29.03.1985
ПРЕДПРИЯТИЕ ПЯ А-3390
НИКОЛЬСКИЙ ЛЕОНИД ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G01P 13/00
Метки: механических, перемещения, узлов
Опубликовано: 15.12.1986
Код ссылки
<a href="https://patents.su/4-1276996-ustrojjstvo-kontrolya-peremeshheniya-mekhanicheskikh-uzlov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство контроля перемещения механических узлов</a>
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1328766
Опубликовано: 07.08.1987
Авторы: Головков, Кузнецов, Недвецкая, Осипов, Павлов
МПК: G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...6 обработки и программного управления поочередно подключает датчики 11 к входу АЦП 5, с выхода которого информация о величине напряженности поля в отрезке микрополосковой линии ных составляющих светового луча (необыкновенный луч) приобретает Фазо- .вьй сдвиг, онределяемый выражением 2, 2 2= 1 с 11 .з 1 п - й + 1 с 11 з 1 п1 Ъ1 Таким образом, в режиме калибровки устанавливается длина удлинителя 13 аптического пути, равная 11=(И + - ). В этом случае вышедший8из подложки отрезка микрополосковой линии 2 луч имеет сдвиг Фазы необыкновенного луча, пропорциональный квадрату амплитуды поля в данном сечении отрезка микрополосковой линии 2 и независящий от времени. Отградуировав предварительно устройство, изменяющее длину оптического пути...
Пороговый элемент

Номер патента: 1368978
Опубликовано: 23.01.1988
Автор: Музыченко
МПК: H03K 19/23
...образом, Единичный сигналпоявляется на д-м выходе регистра 2памяти, если на всех предыдущих выходах регистра имеется единичный сигнали на выходе -го разряда регистра 1 4 О сдвига также единичный сигнал. Одновременно разрешается запись единичного сигнала в (+1)-й разряд регистра2 памяти. Таким образом, в процессефункционирования сдвиг входного кодав регистре 1 сдвига происходит слеванаправо, а заполнение регистра 2 памяти справа налево.Аналогичным образом в регистре 3памяти осуществляется накопление нулевых сигналов с выходов регистра 1 50сдвига. При появлении нулевого сигнала на выходе первого разряда регистра1 сдвига в первый разряд регистра 3памяти записывается единичный сигнал,разрешающий запись сигнала во второйразряд. Единичный...
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1741034
Опубликовано: 15.06.1992
Авторы: Воронов, Головков, Осипов, Павлов, Приходько
МПК: G01N 22/00, G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...для реализации интерференции двух световых лучей,прошедших через сечение измерительной линии 2. Фотоприемник 13 предназначен для преобразования интенсивности светового луча на выходе сумматора 12 света в электрический сигнал. Источник 3 смещения предназначен для установки требуемой рабочей точки на модуляционной характеристике интерферометра.Устройство работает в двух режимах; режиме калибровки и режиме измерения,В режиме калибровки к измерительной линии 2 вместо исследуемого элемента подключается эталонная короткозамкнутая линия. Сигнал СВЧ-генератора 1 поступает на вход измерительной линии 2 и далее на эталонную линию. В результате интерференции падающей и отраженной волн СВЧ-сигнала в измерительной линии устанавливается режим...
Формирователь импульсов
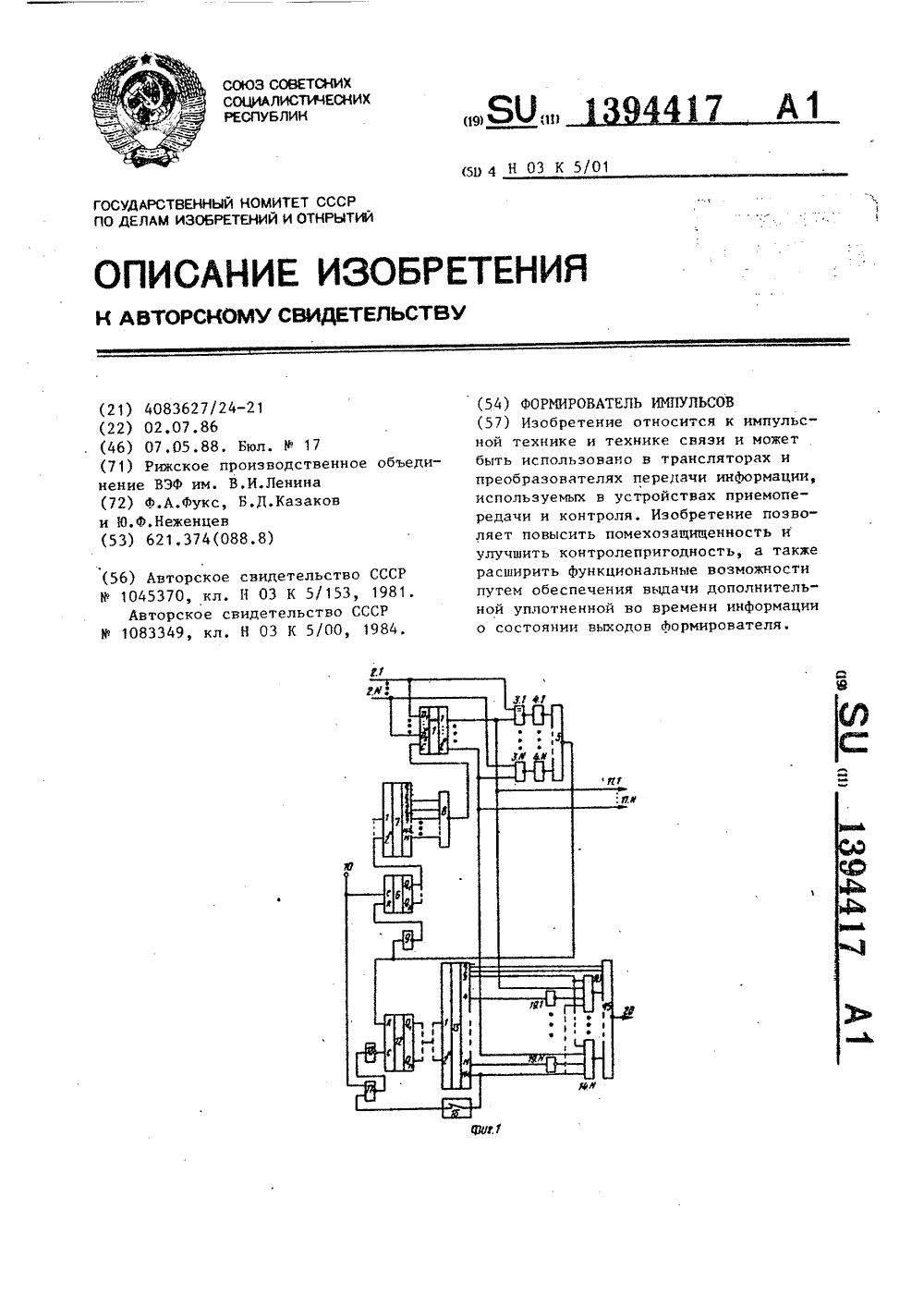
Номер патента: 1394417
Опубликовано: 07.05.1988
Авторы: Казаков, Неженцев, Фукс
МПК: H03K 5/01
Метки: импульсов, формирователь
...считы- вания.Третий элемент И 17 совместно с третьим инвертором 18 обеспечивают управление работой вторых счетчиков 12 и дешифратора 13 при замкнутом контрольном ключе 16, запрещая поступление импульсов тактирования шины 10 на счетный вход счетчика при окончании отсчета.Инверторы 19.119.М обеспечивают согласование взаимодействия второго дешифратора 13 и вторых элемен- тов И 14. 1,, 14.М при формировании на третьих выходах второго дешифрато" ра 13 сигналов сканирования соответствующих выходов регистра 1 параллельной записи.Формирователь импульсов работает следующим образом.За время отсутствия смены информации на входах 2.12,М Формирователя, на выходах регистра 1 параллельной записи и выходах 11.1 1.М формирователя удерживаются сиг...
Формирователь сигналов со сдвигом фазы

Номер патента: 1396239
Опубликовано: 15.05.1988
МПК: H03C 3/00
Метки: сдвигом, сигналов, фазы, формирователь
...1 импульсов. Начинается формирование спада второго информационного импульса. Приэтом рассмотрен случай, когда время задержки информационного импульса больше его длительности, т.е. сигнал на третьем входе формирователя 20 появляется позже, чем сигналы на втором, третьем и четвертом входах формирователя 16. Тогда кодовые комбинации с выхода счетчика 21 поступают через ключ 17 на вход блока 5 сравнения, в то время как на первом входе формирователя 16 уже присутствует кодовая комбинация, соответствующая длительности входного информационного импульса. 1 О 15 Возможен случай, когда время задержки информационного импульса меньше его длительности, т,е. сигнал на третьем входе формирователя 20 появляется раньше, чем сигналы на втором,...
Предыдущий патент: Термочувствительный преобразователь скорости
Следующий патент: Стенд для испытания изделий на комбинированное воздействие вибрационных и линейных ускорений
Случайный патент: Устройство для формования длинномерных изделий