Устройство для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
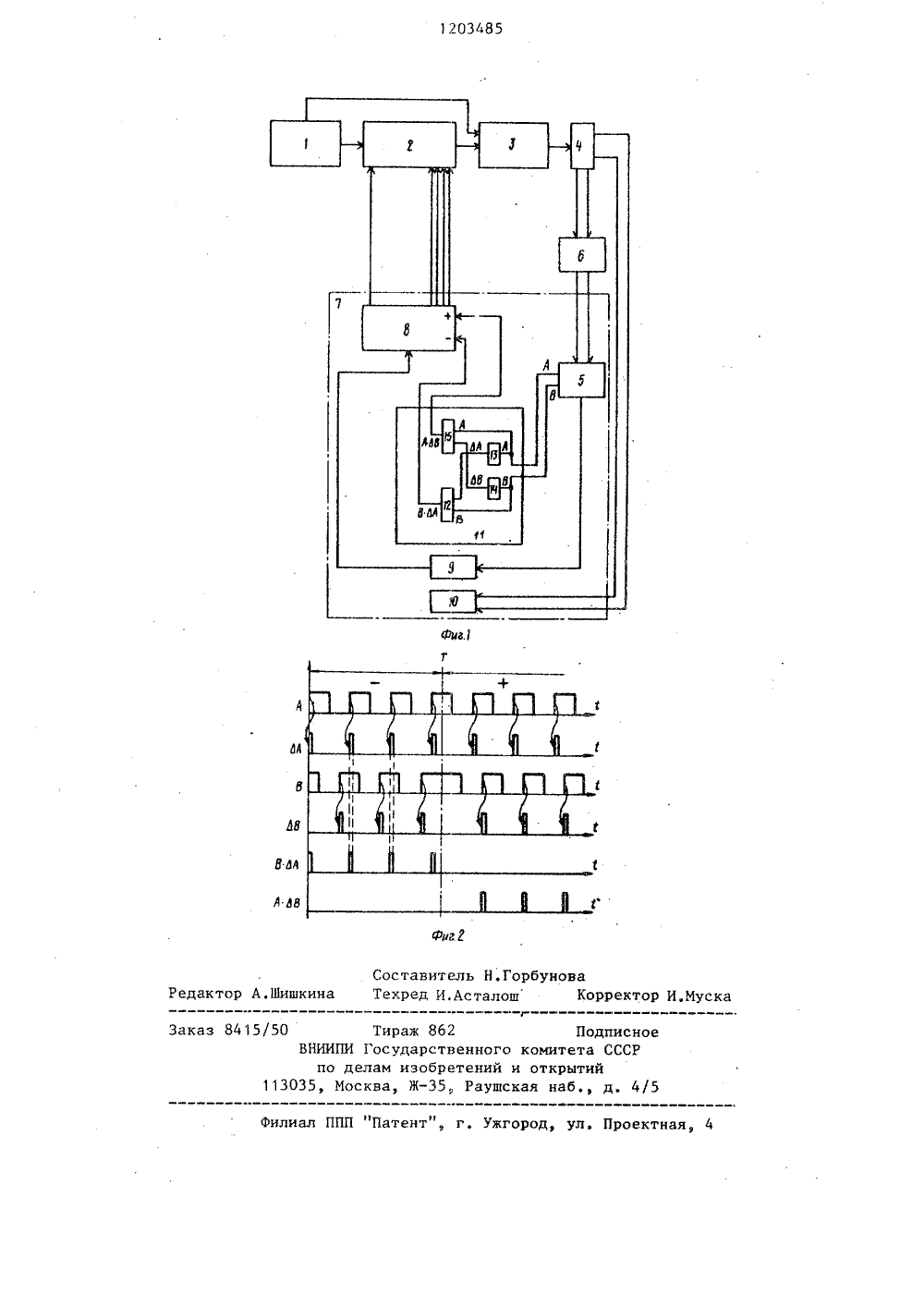
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 4 С 05 В 19 ОПИСАНИЕ ИЗОБРЕТЕНИЯН АВТОВСНОМУ СВИДЕТЕЛЬСТВУ л. У 1роектно струк- электр технолог зводстваИ.Б,Каза88.8)рименению промыш ред, 310.СССР 1972. борник по 1975, с етельство 5 В 19/18(57)тичес испол бот орд т,ф-лы, 2 ил,ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ(71) Всесоюзныйторский институттехнического про(56) Пособие поленных роботов.Капухико Нода. МАвторское свиУ 446034, кл. С СТРОЙСТВО ДЛ ГОЕНИЯ,зобретение относится к автомаому управлению и может бытьзовано для программного управпромьппленными роботами, Изобретение содержит блок программ, блок сравнения, привод, рабочий орган, датчик импульсов, повышающий редуктор, датчик перемещения, содержащий блок определения направления движения, реверсивный счетчик импульсов, элемент И, датчик исходного положения рабочего органа. Введение повышающего редуктора и выполнение датчика перемещения, включающего блок определения направления движения, реверсивный счетчик импульсов, элемент И и датчик исходного положения рабочего органа, позволяют повысить точность позиционирования рабочего органа и расширить область его применения эа счет возможности управления приводом, раающим в относительной системе ко 1 12Изобретение относится к областиавтоматического управления и можетбыть использовано для программногоуправления промышленными роботами,Цель изобретения - повышение точности и расширение области применения устройства за счет возможностиуправления приводом, работающим вотносительной системе координат.На фиг. 1 дана функциональнаясхема устройства; на фиг, 2 - временная диаграмма функционированияблока определения направления движения,Устройство содержит блок 1 программ, блок 2 сравнения, привод 3,рабочий орган 4, датчик 5 импульсов,повышающий редуктор 6, датчик 7 перемещения, содержащий реверсивныйсчетчик 8 импульсов, первый элементИ 9, датчик 10 исходного положениярабочего органа, блок 11 определениянаправления движения,Блок 11 определения направлениядвижения содержит третий элементИ 12, первый и второй дифференцирующие элементы 13 и 14, второйэлемент И 15,Устройство работает следующимобразом,Перед началом обработки программы необходимо установить нули во всех разрядах счетчика 8 импульсов. Сигнал с блока 1 программ поступает на блок управления приводом 3 рабочего органа, который задает направление движения рабочему органу к исходному положению, определяемому совпадением сигналов с датчика 10 исходного положения рабочего органа и импульса (нуль-метки) датчика 5 импульсов. При совпадении этих сигналов с выхода элемента И 9 на реверсивный счетчик 8 поступает сигнал сброса, с приходом которого во всех разрядах счетчика устанавливаются нули,Для сохранения в пространстве исходного положения рабочего органа при наличии на датчике 5 импульсов одной "нуль-метки" на его один оборот, срабатывание и отиускание датчика 10 должны укладыватьося в один оборот датчика 5 импульсов, а при наличии двух "нуль-меток" - в 1/2 оборота датчика 5.Дальнейшее движение рабочего органа в этом направлении прекраща 03485 45 5 О 5 1 О 5 20 25 ЗО 35 40 ется, С этого момента система программного управления начинает работать в абсолютной системе координат,При движении рабочего органа втом или ином направлении на выходахдатчика 5 импульсов формируются двесерии прямоугольных (А, В) импульсов, сдвинутые одна относительноодругой на 90 , Эти импульсы (А, В)поступают на вход блока 11 определения направления движения рабочегооргана.Работа блока 11 определения направления движения рабочего органапоясняется временной диаграммой(фиг. 2) . На дифференцирующих элементах 13 и 14 производится,дифференцирование по передним фронтамимпульсов А и ВНа блок 11 поступают сигналы А и 6 В, на элементИ 12 - сигналы В и ь А. При движении рабочего органа 4 в направлении "-" на выходе блока 11 формируется сигнал В йА, поступающийна вход вычитания (двоичного) ревер. -сивного счетчика 8; при движении внаправлении "+" на выходе блока 11формируется сигнал А 6 В, поступающий на вход сложения реверсивногосчетчика 8. Момент останова и изменения направления вращения рабочегооргана 4.и датчика 5 импульсов обозначен Т,Таким образом, информация в видедвоичных чисел в каждый момент времени отображает положение рабочегооргана 4 и поступает на блок 2сравнения,Двоичный параллельный код счетчика 8 импульсов поступает на блок 2сравнения, где сравнивается с поступившим из блока 1 программ кодомочередной позиции рабочего органа 4. При совпадении кода позиции, поступившего из блока 1 программ в блок 2 сравнения, с кодом, поступившим из реверсивного счетчика 8, вырабатывается сигнал, который через привод 3 рабочего органа прекращает движение рабочего органа 4,Унитарный код датчика 5 импульсов, поступающий на вход реверсивного двоичного счетчика, преобразуется в поСледнем в двоичный код, параллельно поразрядно передается в сравнивающий блок.30 35 40 При передаче вращения датчику 5 импульсов от рабочего органа 4 через редуктор 6 с передаточным числом и = 1 О количество импульсов на один оборот рабочего органа будеТ 640000, а разрешающая способность1640000 оборота.При передаточном числе редуктора п = 100 разрешающая способность1равна что более чем в 10 раз640000Эпревышает разрешающую способность известных систем,Предлагаемое устройство позволяет управлять приводами, работающими в относительной системе, от устройств управления, работающих в абсолютной системе координат, а также обеспечивает увеюйгчение разрешающей способности, что в конечном итоге приводит к повышению точности позиционирования рабочего органа. Это особенно важно, например, для манипуляторов с позиционной и контурной системами управления, применяемых на сборочных операциях. Формула изобретения 1. Устройство для программного управления, содержащее блок программ, подключенный первыми выходами к первым входам блока сравнения, соединенного выходом с информационным входом привода рабочего органа, датчик перемещения, о т л и ч а ю - щ е е с я тем, что, с целью повышения его точности и расширения области применения, в него введен повышающий редуктор, а датчик перемещения содержит реверсивный счетчик импульсов, блок определения. направления движения, первый эле 5 10 15 20 25 мент И, датчик исходного положениярабочего органа, датчик импульсов,вход которого является входом датчика перемещения и соединен с повышающим редуктором, первый и второйинформационные выходы датчика импульсов соединены соответственно спервым и вторым входами блока определения направления движения рабочего органа, а нулевой выход - спервым входом первого элемента И,подключенного вторым входом к выходу датчика исходного положения рабочего органа, а выходом - к сбросовому входу реверсивного счетчикаимпульсов, соединенного суммирующими вычитающим входами соответственно с первым и вторым выходами блокаопределения направления движения,а разрядными выходами, являющихсявыходами датчика перемещения, - свторыми входами блока сравнения,причем второй выход блока программподключен к знаковому входу привода, а выход рабочего органа - квходу повышающего редуктора,2, Устройство по и. 1, о т л и ч а ю щ е е с я тем, что блок определения направления движения, входящий в датчик перемещения, содержит второй и третий элементы И, первый и второй дифференцирующие элементы, подключенные входами соответственно к первому и второму входам блока определения направления движения и к первым входам соответственно второго и третьего элементов И, а выходами - к вторым . входам соответственно третьего и второго элементов И, связанных вы-, ходами соответственно с вторым и с первым выходами блока определения направления движения.ова Корректор И,Муска каз 8415/50ВНИИ по дел113035, Мос Филиал ППП "Патент", г. Ужгород, ул. Проектная,Тиражосудам и 862рственногообретений-35 Раушс Подписноекомитета СССРоткрытийая наб д. 4/5
СмотретьЗаявка
3696433, 07.02.1984
ВСЕСОЮЗНЫЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ ИНСТИТУТ ТЕХНОЛОГИИ ЭЛЕКТРОТЕХНИЧЕСКОГО ПРОИЗВОДСТВА
ВОЛКОВ ЮРИЙ ВИТАЛЬЕВИЧ, КАЗАКОВ ИОСИФ БОРОЛЬФОВИЧ
МПК / Метки
МПК: G05B 19/418
Метки: программного
Опубликовано: 07.01.1986
Код ссылки
<a href="https://patents.su/4-1203485-ustrojjstvo-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления</a>
Реверсивный дискретный датчик направления движения

Номер патента: 1317274
Опубликовано: 15.06.1987
МПК: G01B 7/04
Метки: датчик, движения, дискретный, направления, реверсивный
...1 перемещений.Датчик работает следующим образом.Работа датчика иллюстрируется временной диаграммой напряжения для различных точек схемы, Измерение длинытроса осуществляется путем подсчетаоборотов мерного колеса, которое приводится во вращение тросом, движущимся через шкив колеса. При прохождениизакрепленного на мерном колесе объекта (не показан) через контрольнуюзону без смены направления движенияпоявляются последовательно сигналына выходе, например, элемента 2, затем элемента 3, при снятии сигнала сэлемента 2 сигнал на выходе элементаЗ,некоторое время сохраняется (диаграммы а и Ь на Фиг.2) из-за наличияперекрытия зон чувствительности элемента 2 и 3. При такой последовательности поданных на элементы 6, 6 и10 сигналов формируется импульс...
Реверсивный дискретный датчик направления движения

Номер патента: 1140046
Опубликовано: 15.02.1985
Автор: Мамонтов
МПК: G01B 7/00, G01P 13/00
Метки: датчик, движения, дискретный, направления, реверсивный
...его низкая надежность,обусловленная необходимостью перекрытия временных интервалов импульсных сигналов, вырабатываемых чувствительными элементами.11 ель изобретения - повышениенадежности реверсивного дискретногодатчика скорости как при возможномвременном перекрытии сигналов двухсоседних датчиков, так и при егоотсутствии,1015203035 геров, инвертора, двух трехвходовыхсхем И, двухвходовой схемы И, двухвходовой схемы ИЛИ и элемента задержки, причем первый вход канала соединен с входом 5 первого триггера,входом инвертора и первым входом схемы ИЛИ, второй вход канала соединенс первым входом первой трехвходовойсхемы И, третий вход канала соединен с первыми входами второй трехвходовой схемы И и двухвходовойсхемы И, выход инвертора...
Реверсивный дискретный датчик направления движения

Номер патента: 1448283
Опубликовано: 30.12.1988
Автор: Мамонтов
МПК: G01P 13/00
Метки: датчик, движения, дискретный, направления, реверсивный
...2,3. и 4. Единственным ограничением является необходимость обеспечения последовательного включения и отключения чувствительных элементов, т.е. в каждом цикле первый по ходу движения элементдолжен включится раньше второго, второй - раньше третьего и, соответственно, первый должен отключитьсяраньше второго, а второй - раньшетретьего, а также первый элемент вовтором цикле должен включиться после того как отключится второй в первом цикле, Других ограничений нет.Временная диаграмма работы чувствительных элементов может изменять"ся в процессе эксплуатации, а такжеможет быть разной в каждом цикле,работы, однако при этом обеспечивается надежная работа датчика. Возможные варианты взаимного расположения сигналов, чувствительных .элементов...
Фотооптический датчик для автоматического направления движения мобильных машин

Номер патента: 307756
Опубликовано: 01.01.1971
Авторы: Двали, Институт, Маргвелашвили, Ноза
МПК: A01B 69/04
Метки: датчик, движения, машин, мобильных, направления, фотооптический
...сфериче ских зеркал. В этом центре находится сш.- нальный фотоэлемент 7, чувствительный слой которого расположен так, что лучи от сферического зеркала попадают на него только в момент прохождения зеркала мимо обзорной 25 щели, находящейся на ограждающем косухо(на чертежах не показано).В основании многогранника имеются узкиещели 8, сдвинутые одна относительно другой на угол, равный 120, которые служат для 30 формирования маркериых импульсов в мо 307756мент прохождения их между маркерными фоточувствительными элементами 9 (два фото- диода) и лампами подсвечивания 10. Маркер,ные фоточувствительные элементы сдвинуты один относительно другого на угол нечувствительности (120+ф) М, и М 2 - маркерные импульсы, возникающие в одном и другом...
Датчик направления движения изображения

Номер патента: 1071105
Опубликовано: 15.06.1993
МПК: G01P 3/36
Метки: датчик, движения, изображения, направления
...сточувствительные регистканалов на основе прибовой сВязью, фоточувствигистры расположены поду у, при этом тан енс угла наклонасд двулл соседними Фоточувствиепьыми регистрами не превышает отс ил удссенсй ширины Фоточувстви 5сс р, Регистрами не превышает отнГ)шснил удвоенОЙ ширины фоточувствительс с регистра к его длине,Разещение Фоточувствительных регистров под углом друг к другу позволлет за один период вывода информации выделять канал, в котором направления движения изображения и инФормационного заряда совпадают, чтообеспечивает возможность быстрогоопределения направления движенияизображения, Предельное разрешениепредлагаемого датчика направлеиядвижения изображения зависит от шириы а" фоточувствительного регистра,его длины 1, и...
Предыдущий патент: Индикатор максимального сигнала
Следующий патент: Программное задающее устройство
Случайный патент: Заклепка для односторонней клепки и способ сборки заклепочного соединения