Преобразователь линейных перемещений в частотный сигнал
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
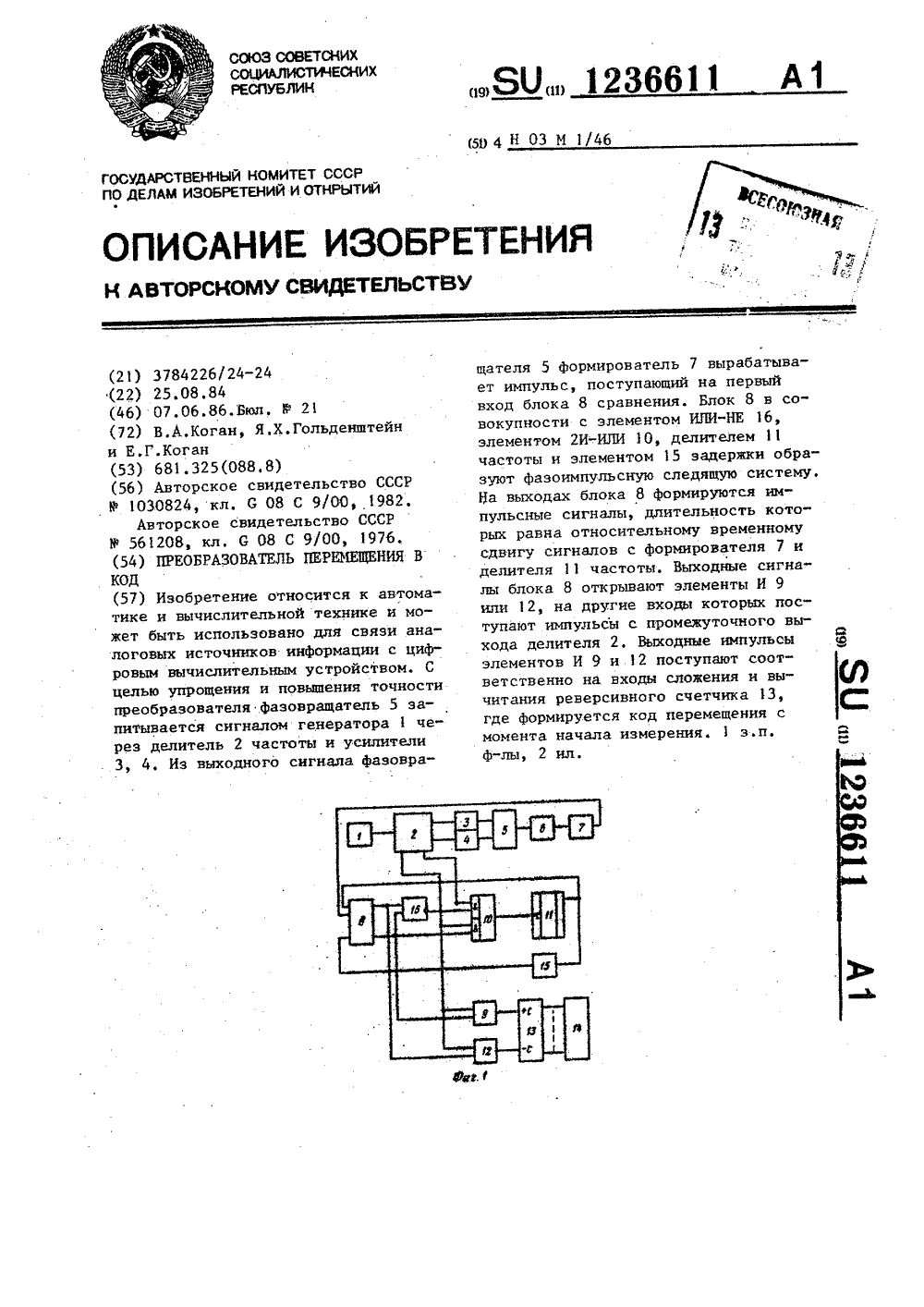
)4 ГОСУДАРСПО ДЕЛ К АВТОРСКОМ ЕТЕЛЬСТВУ ю повышеснабженключентродом пои входом в виде его выхоторов,подктора и оды суммфильтройстваой вхо о т реос плонен овлен продоль вк) НЫЙ КОМИТЕТ СССРОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Пензенский политехнический институт(56) Авторское свидетельство СССРМф 579535, кл, С 01 В 7/00, 1976.Авторское свидетельство СССРУ 1126809, кл. С 01 В 7/00, 1983.(54)(57) 1, ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХПЕРЕМЕЩЕНИЙ В ЧАСТОТНЫЙ СИГНАЛ, содержащий включенные последовательноинтегратор и пороговый элемент, охваченные цепью обратной связи, вкоторую включен бесконтактный потенциометрический датчик перемещений,имеющий расположенные параллельнорезистивный элемент, неподвижныйэлектрод и установленный относительно них с зазором подвижный электродсвязываемый в процессе измерений с объектом контроля, о т л щ и й с я тем, что, с ц ния помехоустойчивости, блоком подавления помехи ным между неподвижным элек тенциометрического датчика интегратора и выполненный усилителя, подключенных к ду двух разнополярных дете двух фильтров нижних часто ченных к их выходам, сумма вычитающего устройства, вх тора подключены к выходам один вход вычитающего устр к выходу сумматора, а друг к входу усилителя.2. Преобразователь по п л и ч а ю щ и й с я тем, зистивный элемент и неподв электрод размещены в одной а подвижный электрод выпол протяженной пластины, уста над ними перпендикулярно и ной оси.1180676 1Изобретение относится к измерительной технике и может быть использовано для контроля двумерных линейных перемещений.Целью изобретения является повышение помехоустойчивости преобразователя линейных перемещений в частот. ныц сигнал.На чертеже приведена блок-схема преобразователя. 10Устройство содержит интегратор 1, включенный с ним последовательно пороговый элемент 2 и включенные в ,цепь обратной связи бесконтактный потенциометрический датчик 3 перемещений и блок 4 подавления помехи. Пороговый элемент 2 представляет собой компаратор 5, неинвертирующий вход которого подключен через делитель 6 напряжения к его выходу, Выход20 компаратора 5 представляет собой частотный выход преобразователя.Бесконтактный потенциометрический датчик 3 перемещений имеет плоский резистивный элемент 7, расположенный25 параллельно ему в той же плоскости неподвижный электрод 8, выполненный в виде пластины с длиной, равной длине резистивного элемента 7, и подвижный электрод 9, выполненный в виде протяженной пластины. Подвижный электрод 9 размещен на изоляционном основании (не показано),связываемом в процессе измерений с объектом контроля,и выполнен с возможностью как продольного перемещения по оси Х, совпадающей с 35 направлением контролируемых перемещений, так и с возможностью поперечного смещения по оси М . Он установлен с зазором над неподвижным электродом 8 и резистивным элементом 7 перпендикулярно их продольным осям, находясь с ними в емкостной связи. Длина пластины подвижного электрода 9 выбирается большей расстояниямежду внешнимикромками неподвижного электрода 8 и резис 45 тивного элемента 7 на величину, равную амплитуде возможных поперечных смещений объекта контроля по оси 5.Потен-, циометрический датчик 3 перемещений и блок 4 подавления помехи образуют 50 цепь обратной связи преобразователя, Резистивный элемент 7 датчика 3 перемещений подключен одним выводом к выходу компаратора 5, а другим - к общей точке. Блок 4 подавления поме хи включен между неподвижным электродом 8 датчика 3 и входом интегратора 1. 2Потенциометрический датчик 3 перемещений пространственно отделен отэлектронной схемы преобразователяи подключен к ней с помощью линиисвязи (не показана).Блок 4 подавления помехи выполненв виде усилителя 10, подключенных квыходу последнего разнополярных детекторов 11 и 12, подключенного к ихвходам своими входами через фильтры13 и 14 нижних частот сумматора15 и вычитающего устройства 16.Один вход вычитающего устройства 16подключен к выходу сумматора 15 айдругой вход - к входу усилителя 10.Интегратор 1 и пороговый элемент2, охваченные обратной связью, представляют собой замкнутую нелинейнуюколебательную систему (управляемыймультивибратор).Параметры этой колебательнойсистемы выбираются из условия существования колебаний прямоугольной формы по всем диапазоне перемещений подвижного электрода 9 датчика 3,Преобразователь линейных перемещении в частотный сигнал работаетследующим образом.При продольном перемещении подвижного электрода 9 потенциометрическогодатчика 3 изменяется коэффициент егопередачи по напряжению, вследствиечего изменяется глубина обратной связи в колебательной системе. Это приводит к пропорциональному изменению частоты генерируемых колебаний прямоугольной Формы на выходе преобразователя. Поперечное перемещение подвижного электрода 9 не приводит к изменению положения точки емкостного съема сигнала с резистивного элемента 7.Следовательно, коэффициент его передачи по напряжению и частота сигналана выходе преобразователя не зависятот величины поперечных смещений электрода 6,Нижняя частота колебаний, генерируемых преобразователем, выбираетсядостаточно высокой для того, чтобысопротивления емкостных связей подвижного электрода 9 с резистивнымэлементом 7 и неподвижным электродом8 не влияли на его коэффициент передачи, благодаря чему ими можно пренебречь. Помимо высокочастотного сигналапрямоугольной Формы, снимаемого свыхода компаратора 5, в цепи обратной11806связи присутствует сигнал помехи низкой частоты, наводимой в линии связи потенциометрического датчика 13. Сигнал помехи компенсируется блоком 4 подавления помехи. С этой целью из суммарного сигнала на входе электронной части преобразователя (входе усилителя 10) выделяется сигнал, получаемый на выходе сумматора 15, который равен по величине и син О фазен сигналу помехи. Этот сигнал вычитается с помощью вычитающего устройства 16 из сигнала обратной связи, содержащего сигнал помехи и подаваемого на вход усилителя 10, обеспечивая его компенсацию. Результирующий сигнал, не содержащий помехи, поступает на вход интегратора 1.Компенсирующий сигнал формируется с помощью разнополярных детекторов 11 и 12, фильтров 13 и 14 нижних частот и сумматора 15 следующим образом.На входы детекторов 11 и 12 поступает высокочастотный сигнал прямо- . угольной формы с выхода усилителя 10, содержащий низкочастотный сигнал, пропорциональный сигналу помехи, и 76 4суммирующийся с ним модулирующий сигнал, пропорциональный амплитуде перемещений объекта контроля. В результате детектирования и фильтрации на входах сумматора 15 формируются сигналы низкой частоты, содержащие синфазные составляющие пропорциональные аддитивному сигналу помехи, и противофазные составляющие, пропорциональные амплитуде перемещений объекта контроля, Противофазные составляющие взаимно вычитаются, а синфазные суммируются сумматором 15. В результате на его выходе формируется сигнал, пропорциональный сигналу помехи и не зависящий от перемещений подвижного электрода 9 датчика 3.Коэффициент усиления усилителя 10 выбирается таким образом, .чтобы общий коэффициент передачи блока 4 для сигнала помехи был равен единице. За счет компенсации сигнала помехи, наводимого в линии связи потенциометрического датчика 3 с электронной частью преобразователя, достигается повышение помехоустойчивости пре" образователя.1180 б 76 Г Составитель И. Техред Т.Дубин Бутяга дактор Л. Гратил Тира ВНИИПИ Гасуда по делам и 113035, МосквППП "Пат г. Ужгород, ул, Проект Фил Заказ 5909/3 650 ственного к обретений иИ, Рау лицинКорректор Подписиитета СССРткрытийкая наб., д. 4 1
СмотретьЗаявка
3702587, 20.02.1984
ПЕНЗЕНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
БУЦ ВИКТОР ПЕТРОВИЧ, ЗЯБИРОВ АЛИ ХАЙДАРОВИЧ, МАРТЯШИН АЛЕКСАНДР ИВАНОВИЧ, ЧЕРНЕЦОВ ВЛАДИМИР ИВАНОВИЧ
МПК / Метки
МПК: G01B 7/00
Метки: линейных, перемещений, сигнал, частотный
Опубликовано: 23.09.1985
Код ссылки
<a href="https://patents.su/4-1180676-preobrazovatel-linejjnykh-peremeshhenijj-v-chastotnyjj-signal.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь линейных перемещений в частотный сигнал</a>
Преобразователь давления в линейное перемещение исполнительного элемента

Номер патента: 1352264
Опубликовано: 15.11.1987
Автор: Давыденко
МПК: G01L 7/04
Метки: давления, исполнительного, линейное, перемещение, элемента
...элементом 9 (например, регулирующей иглой регулятора).- ЬН и,где и - количество витков (участков)5, прижатых друг к другу,(в приведенном на фиг. 1 при 30 мере и = 4),Приснижении давления в полости3 под действием пружины 10 чувствительный элемент 2 перемещается влево.35 Преобразователь давления предлагаемой конструкции упрощает навивку(изготовление) .чувствительного элемента,что пэзволяет изготавливатьего из трубки с большим отношением40 длины большой оси к длине малойоси эллипса сечения трубки без скручивания трубки, смятия ее и надрывовстенок трубки. Изобретение относится к измерительной технике, в частности к преобразователям давления в линейное перемещение исполнительного элемента, и может быть использовано при создании...
Устройство для измерения времени установления выходного сигнала цифроаналоговых преобразователей

Номер патента: 1778910
Опубликовано: 30.11.1992
Авторы: Абаринов, Козусев, Разин
МПК: H03M 1/10
Метки: времени, выходного, преобразователей, сигнала, установления, цифроаналоговых
...т,к. опорные уровни формируются не шумящим" - скорректированным усилителем, Учитывая, что действующее значение "белого" шума пропорционально корню квадратному из полосы частот, то уменьшение полосы пропускания на два порядка позволяет на порядок уменьшить влияние "белого" шума при формировании уровней + 0,5 МР, Эффект снижения шумов еще более значителен, если шум не "белый", а высокочастотный (с преобладающими высокочастотными составляющими), В такте формирование переходного процесса полоса пропускания усилителя-ограничителя должно быть максимальной (корректирующий конденсатор отключен), в противном случае динамические искажения приведут к погрешности измерения. При этом, поскольку происходит сравнение зашумленного и незашумленного...
Устройство для измерения времени установления выходного сигнала цифроаналоговых преобразователей

Номер патента: 1275766
Опубликовано: 07.12.1986
Авторы: Абаринов, Козусев, Разин
МПК: H03M 1/10
Метки: времени, выходного, преобразователей, сигнала, установления, цифроаналоговых
...21,Усиленный в К раз и ограниченный усилителем-ограничителем 17сигнал сумматора 16 наблюдается наэкране осциллографа 4. Путем изменения напряжения Б регулируемого источника 10 выводят усилитель-ограни 30 читель 17 в линейный диапазон выходных напряжений. Так как синхронизация осциллографа осуществляется непрерывно, на его экране наблюдаютсяодновременно три сигнала:З 5 = Й уст + Б к ) 1 с - в первом такте,11 = круст + Ок + 0,5 МР)1 с - вовтором такте и Бз = (Пуст + Пк- 0,5 МР)1 с - в третьем такте.Если О т не скомпенсяровано, то40 на экране будет наблюдаться один издвух уровней ограничения усилителяограничителя 17, например 0,7 В,Таким образом, признаком правильного выбора Бк служит наблюдение на45 экране осциллографа одновременнотрех...
Гидравлический усилитель сигнала магнитоэлектрического преобразователя регулятора скорости гидротурбины

Номер патента: 199026
Опубликовано: 01.01.1967
МПК: F03B 15/00, F15B 3/00
Метки: гидравлический, гидротурбины, магнитоэлектрического, преобразователя, регулятора, сигнала, скорости, усилитель
...снабжен чувствительным элементом в виде двух сопел с дросселирующей заслонкой между ними. Заслонка непосредственно связана со штоком магнитоэлектрического преобразователя, Золотник снабжен также поршеньком, который перемещает золотник, воспринимая разность давлений в его полостях, вызываемую передвижением заслонки. Указанные отличительные особенности повышают чувствительность и увеличиьают быстродействие регулятора скорости гидротурбины.На чертеже показан гидравлический усилитель в разрезе.В корпусе 1 перемещается поршень 2 со штоком 8. Внутри поршня 2 находится золотник 4 с отсекающими кромками 5 и б, снабженный поршеньком 7,Сопла 8 и 9 служат для дросселированиямасла, протекающего через полости поршенька 7. Заслонка 10, перемещаясь...
Преобразователь перемещения в код
Номер патента: 1236611
Опубликовано: 07.06.1986
Авторы: Гольденштейн, Коган
МПК: H03M 1/46
Метки: код, перемещения
...аналогично слу- чаюО Поскольку на вход делителя 11 частоты импульсы не поступали до прихода импульса с выхода формирователя 7, то после прихода последнего фазы сигналов на выходе формирователя 7 5 и ФИСС вновь будут совпадать. Количество импульсов, поступающих на вход счетчика 13, определяется величиной разности фаз между импульсами с ФИСС и формирователя 7.Случай 3. При перемещении ротора фазовращателя 5 в противоположном направлении сигнал приходит на первый вход блока 8 раньше, чем появится сигнал на его втором входе. 5 В этом случае на первом выходе блока 8 появится сигнал, разрешающий прохождение через элемент 2 И-ИЛИ 1 О на вход делителя 11 импульсов удвоенной частоты с четвертого выхода де лителя 2, Тот же сигнал запрещает...
Предыдущий патент: Устройство для измерения остаточных напряжений в образце
Следующий патент: Датчик линейных перемещений