Система управления реверсивным правильно-растяжным станом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
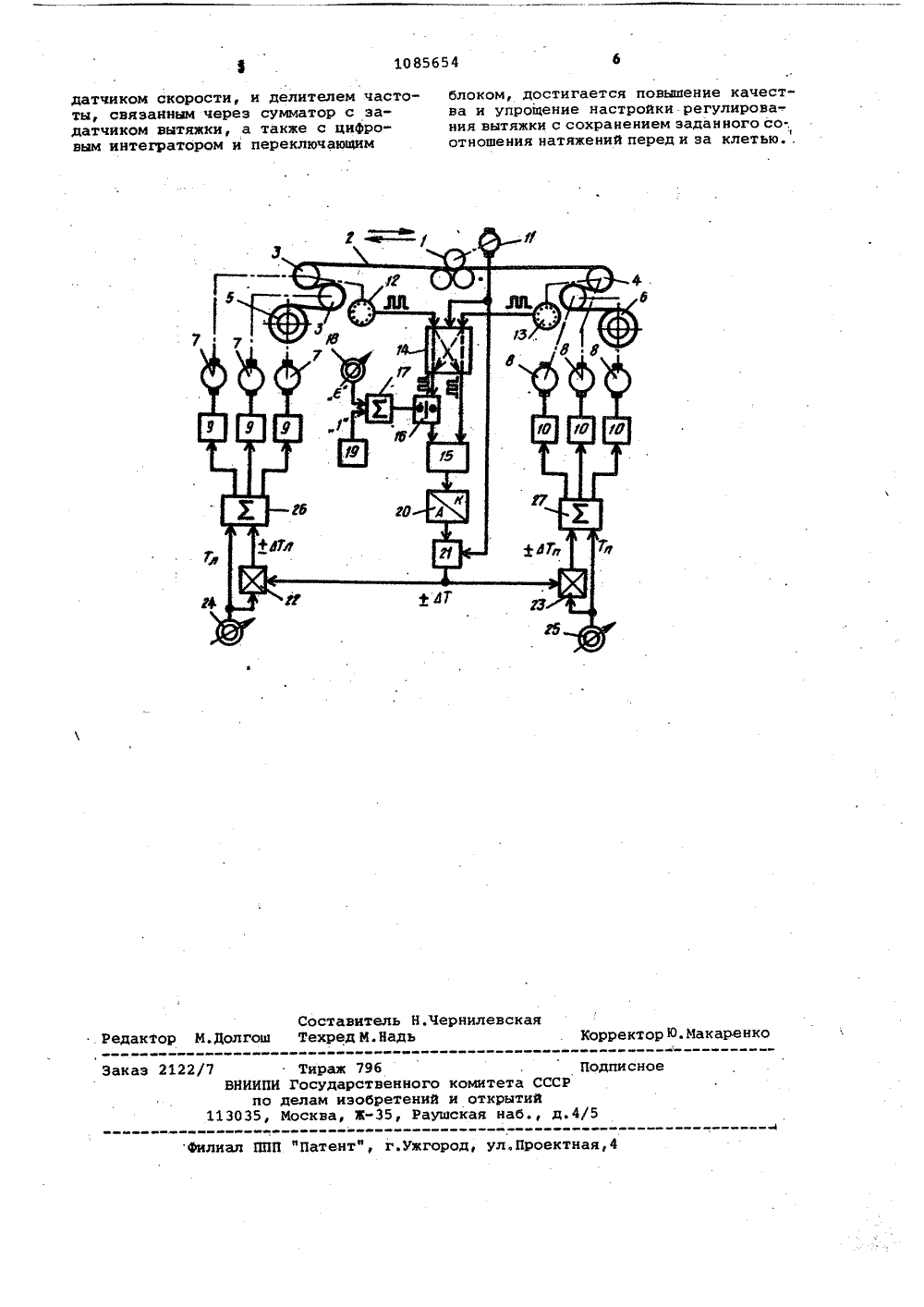
(19) 01)1 М 51) В 212 1 0 ОПИСАНИЕ ИЗОБРЕТЕК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ.Авто 68, к кже ГОСУДАРСТВЕННЫЙ КОМИТЕТ ССС ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТ тип),(54)(57) СИСТЕМА УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ПРАВИЛЬНО-РАСТЯЖНЫМ СТАНОМс правильной клетью и установленными симметрично по обе стороны относительно нее натяжными роликами имоталкой, содержащая приводы натяж"ных роликов и моталки, соединенныес блоками регулирования их, связанные с натяжными роликами задатчикинатяжений, а также переключающийблок и соединенные с ним импульсныедатчики натяжных роликов, датчикскорости правильной клети, подключенной в первому выходу переключающего блока цифровой интегратор ипоследовательно с ним включенныйпреобразователь код-аналог, а та сумматор, задатчик вытяжки и два умножителя, о т л и ч а ю щ а я - с я тем, что, с целью повышения качества и упрощении настройки регулирования вытяжки путем сохранения заданного соотношения натяжений перед и за правильной клетью, она снабжена двумя сумматорами, выходы каждого из которых соединены с блоком регулирования натяжных роликов и моталки, а входы соответственно первый - с эадатчиком натяжения, а второй - с выходом умножителя, первый вход каждого из которых подключен к задатчику натяжения, регулятором вытяжки, выход которого соединен с вторыми входами умножителей, первый вход соединен с выходом преобразователя код-аналог, а второй вход - с датчиком скорости правильиой клети, делителем чиототм, выход которого соединен с вторым входом цифрового интегратора, первый вход - Я с вторым выходом переключающего блока, а второй вход - с выходом сумматора, к входу которого подключен задатчик вытяжки, источником опорного числа, соединенным с вторым входом сумматора.Изобретение относится к области автоматизации прокатного производства и может применяться для автоматического управления реверсивными дрессировочными, правильно-.дрессировочными и правильно-растяжными 5 станами.Наиболее близкой к предложенной по технической сущности и достигаемому эффекту является система управления реверсивным правильно-растяж О ным станом с правильной клетью и установленными симметрично по обе стороны относительно нее натяжнымиКроликами и моталкойсодержащая приводы натяжных роликов и моталки, со единенные с блоками регулирования их, совместные с натяжными роликами задатчики натяжений, а также переключающий блок и соединенные с ним импульсные датчики натяжных роликов и датчик скорости правильной клети, подключенный к первому выходу переключающего блока цифровой интегратор и последовательно с ним включенный преобразователь код-аналог, а также сумматор; эадатчик вытяжки и два умножителя 1 3Недостатком известной системы является то, что задание вытяжки формируется путем генерирования дополнительных импульсов, соответствующих удлинению полосы на выходе из клети, которые суммируются с опорными импульсами, соответствующими не- удлиненной полосе на входе в клеть, после отсчета базовой длины на входе в клеть, При этом возникают биения частоты импульсов перемещения не- удлиненной полосы и колебания натяжений полосы с соответствующим ухудшением ее качества. Кроме того, величина вытяжки задается не непосредственно, а через задание базовой длины, чем усложняется настройка системы.Не обеспечивается также при регу лированни вытяжки стабильность заданного соотношения натяжений перед и эа клетью, поскольку регулирующее воздействие прикладывается лишь к одному иэ натяжных роликов, и не оптимизируются динамические свойства системы регулирования вытяжки ввиду отсутствия регулятора вытяжки, чем ухудшается качество регулирования.Цель изобретения - повышение качества и упрощение настройки регули рования вытяжки с сохранением заданного соотношения натяжений перед и эа правильной клетью.Поставленная цель достигается тем, что система управления ревер сивным правильно-растяжным станом с правильной клетью и установленными симметрично по обе стороны относительно,нее натяжными роликами и моталкой, содержащая приводы натяж" 65 ных роликов и моталки, соединенныес блоками реГулирования их, связанные с натяжными роликами задатчикинатяжений, а также переключающийблок и соединенные с ним импульсныедатчики натяжных роликов, датчик скорости правильной клети, подключенный к первому выходу переключающегоблока цифровой интегратор и последовательно с ним включенный преобразователь код-аналог, а также сумматор, эадатчик вытяжки и два умножителя, снабжена двумя сумматорами, выходы каждого из которых соединены сблоком регулирования натяжных роликов и моталки, а входы соответствен-.но первый - с эадатчиком натяжения,а второй - с выходом умножителя, первый вход каждого из которых подключен к эадатчику натяжения, регулятором вытяжки, выход которого соединенс вторыми входами умножителей, первый вход соединен с выходом преобразователя код-аналог, а второй вход -с датчиком скорости правильной клети, делителем частоты, выход которого соединен с вторым входом цифрового интегратора, первый вход - с вторым выходом переключающего блока, авторой вход - с выходом сумматора,к входу которого подключен задатчиквытяжки, источникомопорного числа,соединенным с вторымвходом сумматора,На чертеже приведена функциональная схема предлагаемой систеьы,Правильно-дрессировочная клеть 1прокатывает полосу 2. Натяжение полосы 2 слева и справа от клети 1 создается соответственно натяжными роликами 3;и 4 и моталками 5 и 6, имеющими приводы 7 и 8 соответственнос блоками регулирования 9 и 10 соответственно.С клетью 1 механически связан датчик 11 скорости, а с натяжными роликами 3 и 4 соответственно импульсныедатчики 12 и 13,Датчики 11-13 электрически связаны с переключающим блоком 14, к двумвыходам которого подключены соответственно входы цифрового интегратора15 и делителя 16 частоты. К второмувходу последнего подключен выходсумматора 17, входы которого соединены с задатчиком 18 вытяжки и источником 19 опорного числа,Цифровой интегратор 15 соединенпоследовательно с преобразователем20 код-аналог и регулятором 21 вытяжки. Второй вход последнего соединен с датчиком 11 скорости, а выходс входами умножителей 22 и 23. Вторые входы умножителей 22 и 23 соединены с выходами задатчиков 24 и 25натяжения и с первыми входами сумматоров 26 и 27 соответственно. Вторые1085654 При этом не вносятся возмущениявь в процессе прокатки на стане.55 Таким образом, благодаря дополиливх нению системы левым и правым суммавьхторами, связанными с блоками регули - гвх =0 .рования соответственно левых, пра 1 +Е вых натяжных роликов и моталок, аф 0 .также с эадатчиками натяжения, умногде явь ГХ - частота импульсов им- ,жителями, связанными соответственно пульсного датчика 12 и 13 соответст- ,с левым и правым сумматорами и завенно эа и перед клетью 1. датчиками натяжения, регуляторомДля решения уравнения (2) дели- вытяжки связанным с преобразоватетель 16 частоты должен уменьшить час 5 лем код-аналог, с умножителями и с(2) входы последних соединены с выхода ми умножителей 22 и 23, а выходы -о входами блоков регулирования 9 и 10 соответственно.Работа системы происходит следующим образом. 5Перед пуском стана, исходя из параметров прокатываемой полосы, задат чиками 24 и 25 устанавливаются натяжения Т, Твполосы 2 перед и за клетью 1. Натяжение полосы 2 перед10 и эа клетью 1 создается за счет суммы моментов соответственно приводов7 и 8 натяжных роликов З,и 4 и моталок 5 и б. При стоянке стана Ч =О, . выход регулятора 21 вытяжки нулевой 15 и соответственно нулевыми являются выходы умножителей 22 и 23.При пуске стана по сигналу датчика .11 скорости переключающий блок 14 подключает импульсные датчики 12 и 13 к входам цифрового интегратора 15 и делителя 16 частоты так, что датчик перед клетью 1 всегда подключается к .цифровому интегратору 15, а датчик за клетью 1 - всегда к делителю 16 частоты. Если при одном направлении прокатки датчиком перед клетью 1 является левый импульсный датчик 12, а датчиком эа клетью 1 правый импульсный датчик 13, то при реверсе стана датчики 12 и 13 меняются местами.Делитель 16 частоты снижает частоту импульсного датчика 12 (13) за клетью 1 соответственно заданной эадатчиком 18 вытяжке Я удлиненной полосы .2 на выходе из клети 1.Вытяжкаполосы 2 в клети 1 определяется выражениемЬ - Ь Ьвыл вх вь хМ1 (1) 40ЪЬвхЬвх гДе Ь,ВЬх, ЬВ- измеРенные в оДноминтервале временисоответственно длина 45элемента удлиненнойполосы 2 за клетью 1и длина элемента не;- удлиненной полосы 2перед клетью 1. 50При одинаковых диаметрах натяжных роликов 3 и 4 выражение (1) можно переписать в виде тоту Гвв, импульсного датчика за клетью 1 в (1+Е) раз. Число .(1+ в ) образуется сумматором 17 благодаря подводу к его входам заданного зна,чения вытяжки Я от задатчика 18 и опорного числа "1". от источника 19Цифровой интегратор 15 обеспечивает решение управнения 2 , поскольку к его входам подводятся импульсы частотойот импульсноговхдатчика перед клетью 1 и .Гвь,/ ( 1+Е) - от импульсного датчика за клетью 1, через делитель 16 частоты. Если вытяжка полосы 2 соответствует заданной Я , то частоты Гв и Г /вх вых (1+ Я ) равны и выход цифрового интегратора 15 нулевой. В противном случае,т.е. при отклонении вытяжки полосы 2 от заданной, на выходе интегратора 15 образуется число соответствующего знака, которое образу.ется преобразователем 20 код-аналог в аналоговый сигнал. Последний преобразуется регулятором 21 вытяжки в сигнал + а Т коррекции растяжения: полосы 2. Одновременно с этим регулятором 21 вытяжки обеспечивается оптимизация динамических свойств регулирования вытяжки, т.е. быстродействие и перерегулирование. Связь регулятора 21 вытяжки с датчиком 11 скорости учитывает изменение динамических свойств объекта регулирования вытяжки при изменении скорости про. катки Ч .Сигнал 1 й Т умножителями 22 и 23 преобразуется в сигналы коррекции натяжений полосы 2 соответственно:слева от клети 1 - йТх= +Т а Тсправа от клети 1- ВТп= +Тд Т (знак "+" соответствует увеличению натяжения, а знак "-" - уменьшению). При этом результирующее натяжение полосы 2, обуславливаемое сумматорами 26 и 27, становится равнымслева от клети 1 - ТЛГ Тл + Тл АТ(Мсправа от клети 1- Т= Тп + Тп ь ТИз выражений (3) следует, что, несмотря на изменение растяжения полосы 2, соотношение натяжений слева. и справа от клети 1 не изменялось, т,е. Тм Т лЙ мТп Тп1085654 ернилевска оставитель ехред М. На Корректор Ю. Макаренко ор М.Долгош Заказ 212 е НИИП 113035 филиал ППП "Патент", г.ужгород, ул.Проектная,4 датчиком скорости, и делителем частоты, связанным через сумматор с задатчиком вытяжки, а также с цифровым интегратором и переключающим тираж 796 осударственногоелам изобретений сква, З, Рауш блоком, достигается повышение качества и упрощение настройки регулирова-. ния вытяжки с сохранением заданного со-.отношения натяжений перед н за клетью Подпиомитета СССРоткрытийкая наб., д.4/5
СмотретьЗаявка
3438794, 17.05.1982
ГОСУДАРСТВЕННЫЙ ПРОЕКТНЫЙ ИНСТИТУТ "ЭЛЕКТРОТЯЖХИМПРОЕКТ"
ПРУДКОВ МАРК ЛЬВОВИЧ, РУДЬ ВЛАДИМИР ПАВЛОВИЧ
МПК / Метки
МПК: B21D 1/00
Метки: правильно-растяжным, реверсивным, станом
Опубликовано: 15.04.1984
Код ссылки
<a href="https://patents.su/4-1085654-sistema-upravleniya-reversivnym-pravilno-rastyazhnym-stanom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления реверсивным правильно-растяжным станом</a>
Устройство определения относительного обжатия полосы в прокатной клети

Номер патента: 908449
Опубликовано: 28.02.1982
Авторы: Демин, Калачев, Купор, Ландис, Парфенов, Пронякин, Савченко
МПК: B21B 38/00
Метки: клети, обжатия, относительного, полосы, прокатной
...кодов ,элементы И 27 и 28, элемент НЕ 29,триггер 30, регистрирующий прибор 31.Устройство работает следующим образом. 20В исходном положении счетчики и регистры установлены в нулевое состояние. При входе голОвной части полосы в Кклеть по сигналу датчика 1 наличия металла блок 6 управле ния откроет. элемент И 10, который пропускает импульс с выхода делителя 8 частоты на вход первого счетчика 16 через элемент ИЛИ 13 в течение интервала времени С прохождения 30 межклетевого промежутка Ьп.ДЬЧ,9 6пения откроет элемент И 9.по сигналу датчика 2 наличия металла в К-ой клети.Когда код счетчика 16 сравнивается с кодом регистра 19, на выходе схемы 24 сравнения кодов появляются импульсы с частотой Е = которыеИ поступают на входы счетчиков 17...
Устройство для автоматизированной замены клетей при бесконечной прокатке полосы

Номер патента: 995944
Опубликовано: 15.02.1983
Авторы: Данилов, Трусов, Шаталов
МПК: B21B 37/00
Метки: автоматизированной, бесконечной, замены, клетей, полосы, прокатке
...нажимных устройств и общим элементом 15 сравнения. Общий блок 16 деления соединен с измерителями 9 скорости полосы на входе в стан и выходе из стана, выход блока 16 соединен с входом общего элемента 15 сравнения, второй вход которого соединен с общим задатчиком 17 деформации.С помощью данного устройства решается задача замены любой из клетей стана бесконечной прокатки на резервную клеть без снижения скорости прокатки.Система работает следующим образом, Межклетевые натяжения поддерживаются при помощи датчиков 7 натяжения и регуляторов 8 скорости.Задатчйками 12 вытяжки полосы задается требуемая, а следовательно, и суммарная деформация полосы в каждой из пяти клетей стана (например, шестая клеть резервная) и общая вытяжка, а,...
Устройство для регулирования толщины и натяжения полосы на входе стана холодной прокатки

Номер патента: 564018
Опубликовано: 05.07.1977
Авторы: Дралюк, Санников, Синайский, Стулин
МПК: B21B 37/16
Метки: входе, натяжения, полосы, прокатки, стана, толщины, холодной
...клетью, выход которого соединен со вхочом системы чттоявления скоростью натякных роликов 1.Известное устройство позволяет устранить влияние рвзнотолпшнностц подката на авления нажимного усъ.564018 Тираж 1080 11 одписпо филиал 11 НП "11 атент, г, Ужа ород, ул. Проектная, 4 На чертеже изображена структурная схе.предлагаемого устройства ( для опреде пенности показан регулятор натяжения с непосре.ственным измерением натяжения),На вход системы управления 1 скоростью первой клети поступает сигнал 2 от системы управления скоростью стана, На вход системы управления 3 положением нажимного устройства первой клети посту. пает сигнал 4 от системы регулирования ,толщины и натяжения полосы в последующих межклетевых промежутках. Эти же сигналы...
Устройство для разглаживания металлической полосы на выходе из прокатной клети

Номер патента: 1500401
Опубликовано: 15.08.1989
Авторы: Коваленко, Сафьян, Сорокин
МПК: B21B 13/02
Метки: выходе, клети, металлической, полосы, прокатной, разглаживания
...З 0сой 16, который может приниматьсяв пределах 20-50 . Откидные болты закреплены на корпусе с помощью шарниров 17,35Устройство работает следующим образом. Гайки 10, в зависимости от требуемого угла охвата, устанавливают в 40 соответствии с рабочим положением ролика 1. Затем откидные болты 8 выводят из открытых пазов 14, а раму 8 вместе с роликом 1 поднимают пневмоцилиндром 1 1 в крайнее верхнее по ложение, после чего производят заправку полосы 16, пропуская ее передний конец между роликом 1 и проводкой 12, опускают пневмоцилиндром 11 раму и вводят откидные болты в пазы 14 верхней траверсы 5. После заправ.= ки полосы в моталку стана давлением полосы от ее натяжения ролик поднимается в рабочее положение, опреде 1 фляемое упором верхней...
Устройство для разглаживания полосы на выходе из прокатной клети

Номер патента: 1574304
Опубликовано: 30.06.1990
Авторы: Бендер, Горбунков, Коваленко, Сафьян, Сорокин, Татаренко
МПК: B21B 39/16
Метки: выходе, клети, полосы, прокатной, разглаживания
...гидроцилиндра 8 отводят ролик 4 в нерабочее положение (на фиг,1 показано штрих-пунктирной линией) и производят заправку переднего конца полосы на моталку, Затем подьемом штока устанавливают ролик в рабочее положение, при котором полосу прокатывают с заданным углом охвата а рабочего валка 11 и соответствующим натяжением. В случае разрыва полосы, который происходит преимущественно в очаге де формации, смятая полоса, заполняя зону,ограниченную рабочими валками и роликом, и преодолевая сопротивление гидроцилиндров, отжимает ролик до полной остановки стана,.10 Соединение ролика с механизмом установки (гидроцилиндром) через двуплечий рычаг, который шарнирно установлен в корпусе на станине, исключает поломки устройства при забуривании полосы,...
Предыдущий патент: Способ производства электросварных труб
Следующий патент: Устройство для правки цилиндрических деталей типа стаканов
Случайный патент: Способ повб1шения антибактериальной активности