Способ управления процессом драгирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1071709
Авторы: Иванова, Суздальницкий

Текст
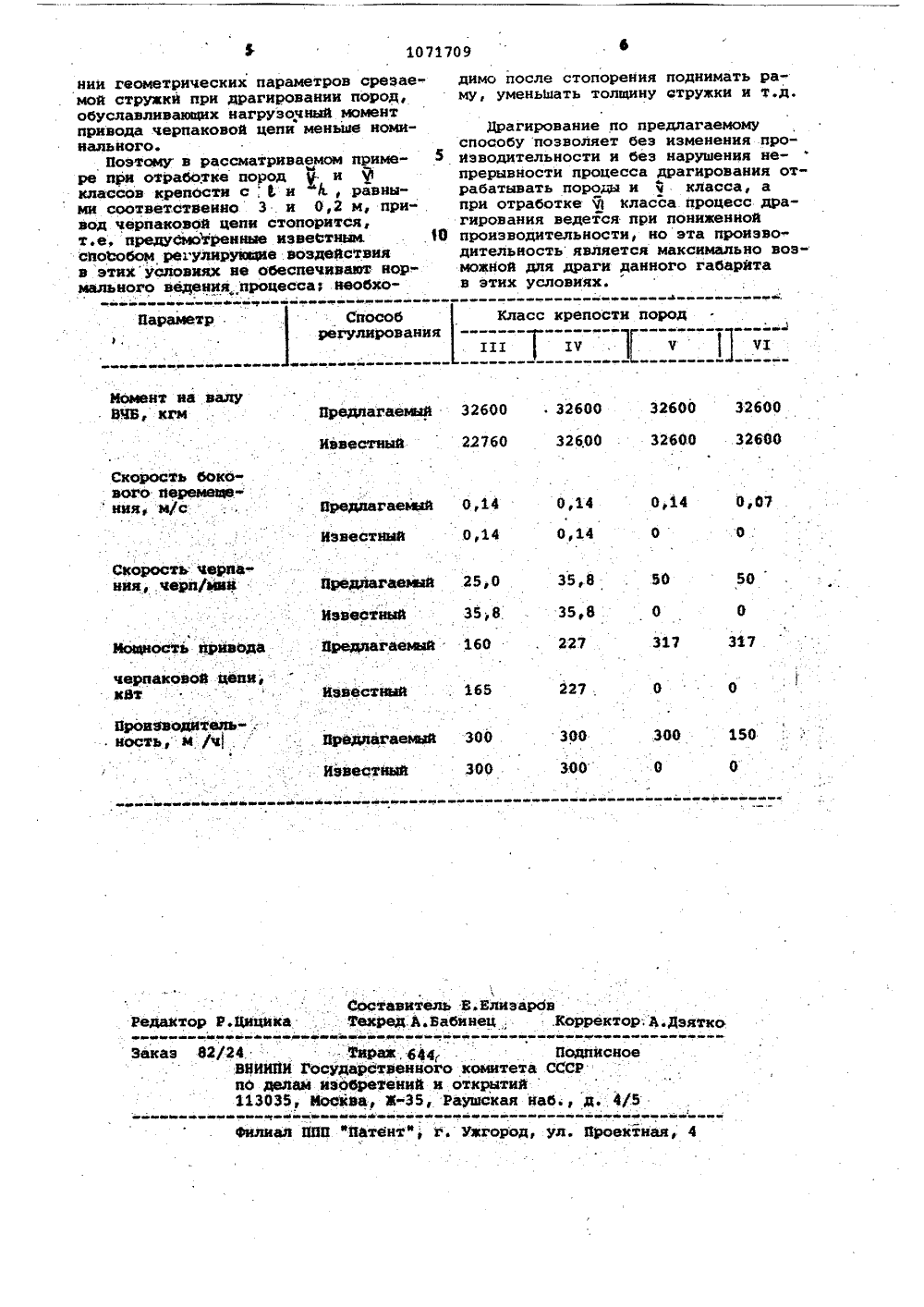
/08С 522 Е 02 САНИЕ ИЗОБРЕТН АВТОРСН 9 ЕЛЬС ГОСУДАРСТВЕННЬ 2 Й КОМИТЕТ СССРГЮ ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(21) 3479125/29-03 (22) 29.0782 (46) 07,02.84.Бюл. В 5 (72) М.Л. Суздальницкий и И.В.Иванова (71) Всесоюзный научно-исследователь-ский институт золота и редких металлов (533) 622.271.5(0888) .(5 б) 1. Авторское свидетельство СССР В 233049, кл. Е 025/28, 1969.2. Авторское свидетельство СССР. В 723040, кл. Е 02 Р 3/00, 19783. Лыков М,Б. Опыт работы системы автоматического регулирования добычного комплекса драги САРДК-1 М с приводой черпаковой цепи повышенноймощ-, ности, -фКолымаф, 1976., 9 6,с,30-32. (:54)(.57). СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ДРАГИРОВАНИЯ, основанный на измененииг скорости бокового перемещения прн превышении моментом привода черпаковой цепи номинального значения и регулировании скорости черпания, о т - л и ч а ю щ и й с я тем,.что, с це лью повышения производительности при отработке крепких пород, при превышении моментом привода черпаковой цепи номинального значения увеличивают скорость черпания при посто-, янной скорости бокового перемещения до тех пор, пока момент привода черпаковой цепи не станет равным номинальному, а при достйжении максимально допустимого значений скорости черпания по мере увеличения крепос ти пород снижают скорость бокового Е перемещения.,до тех пор, пока момент ,привода черпаковой цепи не ста- нет равным номинальному.Изобретение относится к управлениюпроцессами отработки рассыпных месторождений открытым способом и можетбыть использовано, в частности, дляуправления процессом черпания многомерпаковых драг при ведении дноуглубительных работ многочерпаковыми землечерпалками.Известен способ управления процессом драгирования, заключающийсяв том, что крепость драгируемых пород измеряют по нагрузке (,моменту)привода черпаковой цепи, и при повиаении ее относительного заданногозначения скорости черпания и бокового перемещения уменьшают, а при 15снижении - увеличивают П 3 .Недостаток способа заключаетсяв отсутствии возможности поддержания постоянства производительности,поскольку любые изменения крепостипород сопровождаются изменением скорости бокового перемещения, а величина производительности драги однозначно связана с этим параметром.Известен также способ управленияпроцессомдрагирования, основанныйна изменении скорости боковогоперемещения при превышении моментапривода черпаковой цепи номинальногозначения и регулирования скоростичерпания 21 и СЗ 1 .Однако известный способ не позволяет поддерживать постоянную производительность при черпании крепких пород, вызывающих нагрузки привода черпаковой цепи свыше номинального; значения, Поэтому при драгировании коких пород снижается производительность,Целью изобретения является повы"шение производительности при отработ ке,крепких пород.Цель достигается тем, что согласноспособу управления процессом драгирования, основанному на изменении скорости бокового перемещения при превы шенин моментом привода черпаковой цепи номинального значения и регулировании скорости черпания, при превышении моментом привода черпаковой цепиноминального значения, увеличиваютскорость черпания.при постоянной скорости бокового перемещения до техпор, пока момент привода черпаковойцепи не станет равным номинальному,а при достижении максимально допустимого значения скорости черпанияпо мере увеличения крепости породснижают скорость бокового перемещения до тех пор, пока момент приводачерпаковой цепи нв станет равным номинальному. ООСпособ осуществляется следующимобразом.Когда при увеличении крепости пород, приводящем к превышению момента привода черпаковой цепи номинального значения, увеличивают скоростьчерпания без изменения скорости бокового перемещения, объем срезаннойпороды, т.е. производительность,не изменяется. Уменьшается толькокоэффициент наполнения черпаков,однако количество породы, оттранспортированной черпаковой цепью, такжене изменяется. Увеличение скоростичерпания при подцержании постоянства момента приводит к увеличениюполезной мощности привода черпаковойцепи. По мере дальнейшего увеличенйякрепости пород скорость черпаниядостигает максимально допустимогозначения. Только после достижениямаксимального значения скорости черпания, поддержание постоянства номинального момента приводачерпаковойцепи осуществляют уменьшением скорости бокового перемещения. При этомпроизводительность снижается, но остается на максимально возможном длядраги данного габарита уровне, так кактранспортная способность черпаковойцепи используется полностью (скоростьее максимальна, нагрузка номинальная).Полезная мощность привода черпаковойцепи максимальна для драги данногогабарита. На чертеже изображена блок-схема системы для осуществления способа.Устройством 1 измеряют текущую производительность драги (например, по нагрузке нерегулируемого привода бочки), сравнивают ее с заданным значением производительности Яздс помощью элемента 2 сравнения. Разностный сигнал подают на регулятор 3 скорости (вход а) двигателей привода черпаковой цепи, регулируемых дри постоянном моменте, т.е. изменением якорного напряжения. Ток нагрузки двигателей в этом случае однозначно связан с моментОм. Регулятор 3 в соответствии с поступающим на него рабностным сигналом изменяет напряжение 0 т, по- " даваемое на якорь двигателей. привода черпаковой цепи 4 для изменения скорости движения черпаковой цепи 5, т.е. скорости черпания Ч (количество грунта, подаваемое черпаковой цепью в бочку, определяет нагрузку привода бочки, а значит, и производительность) .Выход устройства 6, измеряющего нагрузку (момент) привода черпаковой цепи Э 1 соединен с входом порогового элемента 7, настроенного на номинальную нагрузку привода черпаковой цепи. Выходной сигнал порогового элемента 7 подается на второй вход регулятора 3 скорости привода черпаковой цепи, настроенйый таким образом, что увеличение сигнала на входе с вызывает снижение напряжения О;щ, а .на входе 6" - увеличение Ощ40Нагрузочный момент привода чер 1 аковой цепи выражается формулойЧрВ= М СК 10 - ,ХХ Чъгде МХ - момент холостого ходаК - удельное сопротивлениеХ 7пород черпанию;Ч и ф - соответственно скоростичерпания и бокового перемещенияС - коэффициент пропорциональности,Поскольку по известному способуотношение скоростей бокового перемещения и черпания величина постоянная, то из приведенного выражения следует, что при регулировании драгирования известным способом нагрузочныймомент привода черпаковой цепи отабсолютных величин указанных скорос 60 тей не зависит и одновременным снижением обеих. скоростей нельзя обеспечить снижение нагрузки привода черпаковой цепи. Таким регулированиемможно только поддерживатьпостоян 65 ство производительности при изменеДетектор 8 максимальной скорости черпания следит за величиной скоростичерпания Ч и на его выходе появляется сигнал в слуЧае, если скоростьчерпания становится равной верхнему пределу скорости / . Сигнал5с выхода детектора 8 поступает напервый вход В коммутирующего устройства 9, а на второй вход ф этогоустройства поступает сигнал с выходапорогового элемента,7 (сравнивающего 10текущее значение нагрузки привода сноминальным значением), Выходной сигнал с коммутирующего устройства, который появляется только при наличиивходных сигналов на обоих входах, по дается на второй вход 6 регулятора.10 скорости привода носовых лебедок 11 которые осуществляют боковоеперемещение черпаковой цепи для срезания пород. На вход Ф регулятора 10 20подается сигнал для управления носовыми лебедками при черпании легкодрагируемых пород и сигнал для корректирования величины скорости бокового перемещения Ф при изменениигеометрических параметров стружки,например, вследствие серповидностизабоя,Процесс управления в системе,изображенной на чертеже, происходитследующнм образом. Исходное состояние системы - отработка легкодрагируемых пород, когда нагрузка привода черпаковой цепи ниже номинальной. Скорость бокового перемещения ф установлена (также как толщина стружки и уходки) требуемой для срезания пород в заданном объеме Зад Скорость черпанияустанавливается регулятором 3, работающим по входу О в зависимости от разностного сигнала между текущим 8. и заданным В 1,азначениями производительности. 11 о мере увеличения крепости пород нагрузка привода черпаковой цепи достигает номинального значения, и при превышении ее появляется сигнал на выходе порогового элемента 7. Этот сигнал подается на вход б". регулятора 3, и скорость черпания увеличивается до тех пор, пока нагрузка привода черпаковой цепи не станет равной заданной. Сигналов на измене-ние скорссти бокового перемещения в этом случае не поступает. Произ" водительность поддерживается на заданном уровне, При дальнейшем увеличении крепости пород скорость черпания у достигает верхнего предела диайазона регулирования; повышением скорости черпания нельзя добиться поддержания постоянства номинальной нагрузки привода черпаковой цепи. Тогда появляетСя сигнал на выходе детектора 8 максимальной скорости черпания, он поступает на вход е коммутатора 9 1 на второй вход егопоступает сигнал с выхода порогового элемента 7), а с выхода коммутатора 9 поступает сигнал на вход Ь регулятора 10 скорости привода носовых лебедок 11 дпя снижения скорости бокового перемещения Ч, в результате чего драгирование устойчиво ведется с пониженной относительно заданного значе- ния производительностью, но это пониженное значение будет максимально возможным в данных условиях драгирования для драги данного габарита, поскольку скорость черпания максимальна, натрузка привода черпаковой цепи номинальйая.Рассмотрим в качестве примера реализацию способа на 250-литровой драге ИЗТМ, оборудованной регулируемыми приводами, черпаковой цепи и носовых лебедок. Номинальный момент привода черпаковой цепи, приведенной к валу верхнего черпакового барабана, для драги этогогабарита составляет 32 б 00 кгм; диапазон изменения скорости черпания при регулировании,по предлагаемому способу 0-50 черп/мин (верхний предел обусловлен технологическими ограничениями типа условий разгрузки черпаков и др); при регулировании известным способом0-36 черп/мин.Рассмотрим процесс управления по предлагаемому и известному способам при увеличивающейся крепости при заданной производительности Юз 1, = - 300 м/ч. Величина уходки с = 3 м, толщина стружки Ь = 0,2 м. Результаты сопоставления приведены в таблице.1071709 вивви а т ю т аа а ю еюивитеее те 111 1 Ч Ч Ч 1и аю ва ет втюттивтт таюеювю вЕюаиМомент иа валуВЯБ, кгм 32600 32600 32600 32600 Предлагаемый 32600 32600 32600 Иввестиый . 22760 Скорость бокового перемющ 6ния, м/с 0,14 0,070 О. Предлагаемый 0,14 Известный 0,14 0,14 0,14 Скорость черпания, черн/мама Предлагаемый .25,0 Известный35 8.Йредлагаемый 160 35,8 35,8 0 Мощность привода 317 227 Известный черпаковой цепифкВт 227 0 Проиэводйтель-; ность, М /ч .ПРЕдлагаемый 300 300 300 150 ЗОО 300 Известйый ютееейееететюейВатеаееюаааеююаатвиееаееетввееававааатеееета Составитель В,ЕлизаровРедактор Р.цицика Техреду,А.Бабннец, .Корректор А.дзяткоеетеЕЕвиюеюЕЕее ЕтеВютюавюеюююютютетттетвттввюваевивавЗаказ В 2/24 МиРаж, 644, . ПодписноеВОИИЙИ Госуд аратвенного комитета СССРпо делам изобретений и открытий113035, Москва, 3-35, Раушская наба д. 4/5еюавюееаювиеюююеевбавиееавеиФеюеееетеввеювеювававеютеФилиал ЙПП фПатентф, г-. ужгород, ул. Проектная, 4 нии геометрических параметров срезаемой стружки при драгировании пород, обуславливающих нагрузочный момент привода черпаковой цепи меньше номинального.Поэтому в рассматриваемом примере при отработке пород у. и 9 классов крепости с, В и 1, равнымн соответственно 3 . и 0,2 м, при- . вод черпаковой цепи стопорйтся, т.е, предусмотренные известным, О способом ре 1 улирувщие воздействия в этихусловиях ие обеспечивают нормального ведения, процесса; .необховавевюююеваВаавваееватееюввитю Параметр . СпособРегулирования иаааютавюааваюав ЕааЮвааааюааююавиаааа димо после стопорения поднимать раму, уменьшать толщину стружки и т,д. Драгнрование по предлагаемому способу позволяет без изменения производительности и без нарушения непрерывности процесса драгирования отрабатывать породы и ч класса, а при отработке ф класса процесс драгировання ведется прн пониженной производительности, но эта производительность является максимально возможной для драги данного габарита в этих условиях.тттваа ттютеЕетата ююю,Класс крепости пород
СмотретьЗаявка
3479125, 29.07.1982
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ЗОЛОТА И РЕДКИХ МЕТАЛЛОВ
СУЗДАЛЬНИЦКИЙ МИХАИЛ ЛЬВОВИЧ, ИВАНОВА ИРИНА ВЛАДИМИРОВНА
МПК / Метки
МПК: E02F 3/08
Метки: драгирования, процессом
Опубликовано: 07.02.1984
Код ссылки
<a href="https://patents.su/4-1071709-sposob-upravleniya-processom-dragirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления процессом драгирования</a>
Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда

Номер патента: 1150312
Опубликовано: 15.04.1985
МПК: E02F 3/90
Метки: земснаряда, многочерпакового, привода, цепи, черпаковой
...преобразователя 12, вентильный преобразователь 29 которого подключен к обмотке 30 возбуждения двигателя.Устройство работает следующим образом,Звено 5 черпания (забой) характеризует процесс взаимодействия одного или нескольких черпаков, поворачивающихся со скоростью черпания Ч вокруг нижнего черпакового барабана, с грунтом, рассматриваемых совместно, как регулируемый объект. Управляющими воздействиями являются скорость папильонирования %, скорость черпания Ч и подача вдоль станового троса г. Свойства забоя характеризуются удельным 5 10 15 20 25 ЗО 35 40 45 50 55 коэффициентом сопротивления черпанию 0 (категория грунта 1, толщиной снимаемого слоя грунта Ьл, подачей вдоль переднего станового троса , углом папильонирования сС В процессе...
Привод черпаковой цепи земснаряда

Номер патента: 1219753
Опубликовано: 23.03.1986
Авторы: Арефьев, Иванов, Шаповалов
МПК: E02F 9/22
Метки: земснаряда, привод, цепи, черпаковой
...в цепи электродвига- ЗОтеля 1, а задающая обмотка 17 включена к источнику независимого питанияс потенциометром 18.Устройство работает следующим образом.35Исходя из технологического режима,принимается среднее значение тока 1 о исоответственно регулируется гок потенциометром 18. Начиная с точки В,ток уставки будет выше тока в управляющей обмотке 16 и гидравлическийнасос 2 будет работать в режиме насоса, нагретая жидкость из бака 13 вгидроаккумулятор 3 по трубопроводам7, 6 и 5 через невозвратный клапан 9и золотник 4 от давления Р до Р1 чю и;зПри достижении максимального допустимого давления Роткрывается переливной золотник 11 и слив рабочейжидкости осуществляется по трубопроводу 10 в бак 13, а гидравлический насос 2 переходит в режим...
Устройство для поддержания заданного момента на валу привода черпаковой цепи многочерпакового земснаряда

Номер патента: 1406303
Опубликовано: 30.06.1988
Метки: валу, заданного, земснаряда, многочерпакового, момента, поддержания, привода, цепи, черпаковой
...работ оператором задаются основные параметры технологического процесса; подача вдоль переднего станового троса 1, угол папильонирова-,ния й , среднее значение толщины срезаемого слоя Ьи скорость черпания Ч. При неизменном коэффициентесопротивления черпания(категориягрунта) и постоянных значениях параметров 1,, Ьи Ч нагрузка Рна привод 4 черпаковой цепи, формируемая звеном 3 черпания полностьюопределяется величиной скорости папильонирования Ч, которая в свою очередь определяется величиной управляющего сигнала П, поступающего с узла 1 формирования, Ток якоря и вращающий момент двигателя привода 4черпаковой цепи определяется нагрузкой Р и зависит от степени наполнения черпаков грунтом, Исходя из кон-:кретных грунтовых условий...
Устройство для поддержания постоянного момента на валу привода черпаковой цепи многочерпаковогоземснаряда

Номер патента: 244206
Опубликовано: 01.01.1969
Авторы: Железн, Киржнер, Пильдон, Фельд
МПК: E02F 9/20
Метки: валу, многочерпаковогоземснаряда, момента, поддержания, постоянного, привода, цепи, черпаковой
...управления скоростью электроприводов папильонажных лебедок 2. Усилитель имеет две встречно включенные обмотки управления, первая питается от датчика 3 скорости (например, тахогенератора), жестко соединенного с валом электродвигателя привода черпаковой цепи 4, а вторая - от разности напряжений, одно из которых снимается с датчика 5 момента на валу, включенного в главную цепь электродвигателя привода черпаковои цепи, а другое - от датчика и устройства б сравнения через вентиль 7.При работе черпаковой цепи и при величине тока, меньшей заданного значения, пропорциональный усилитель управляется от датчика скорости, и папильонажные лебедки развивают максимально допустимую скорость. На вторую обмотку ток не поступает, так как, если напряжение...
Привод черпаковой цепи земснаряда

Номер патента: 1313978
Опубликовано: 30.05.1987
Авторы: Арефьев, Иванов, Шаповалов
МПК: E02F 9/22
Метки: земснаряда, привод, цепи, черпаковой
...забирая жидкость по трубопроводу 6 из бака 7 и нагнетая ее по трубопроводу 4 в гидроаккумулятор 3. Гидронасос отбирает энергию от электродвигателя 1 и накапливает (аккум)лирует) ее в гидроаккумуляторе 3. При этом, чем больше разница между значениями среднего тока Уо и мгновенным рабочим Ур, тем больше отклоняет толкатель 12 шайбу 5 гидронасоса 2, увеличивая его производительность, а следовательно, и момент, догружающий электродвигатель 1, что приводит к выравниванию Уо и Ур. По мере увеличения момента на черпаковом барабане наклон шайбы 15 уменьшается, что приводит к уменьшению производительности гидронасоса 2 и, следовательно, к снижению момента, догружаюшего электродвигатель 1. Предохранитель 45 50 55 10 15 20 25 30 35 40 ный...
Предыдущий патент: Стенд для исследования подводного резания грунтов
Следующий патент: Ковш экскаватора
Случайный патент: Коммутирующее устройство с запоми-нанием сигнала управления