Система управления технологическим процессом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1047565
Авторы: Кузин, Леонидов-Каневский, Сбитнев
Текст
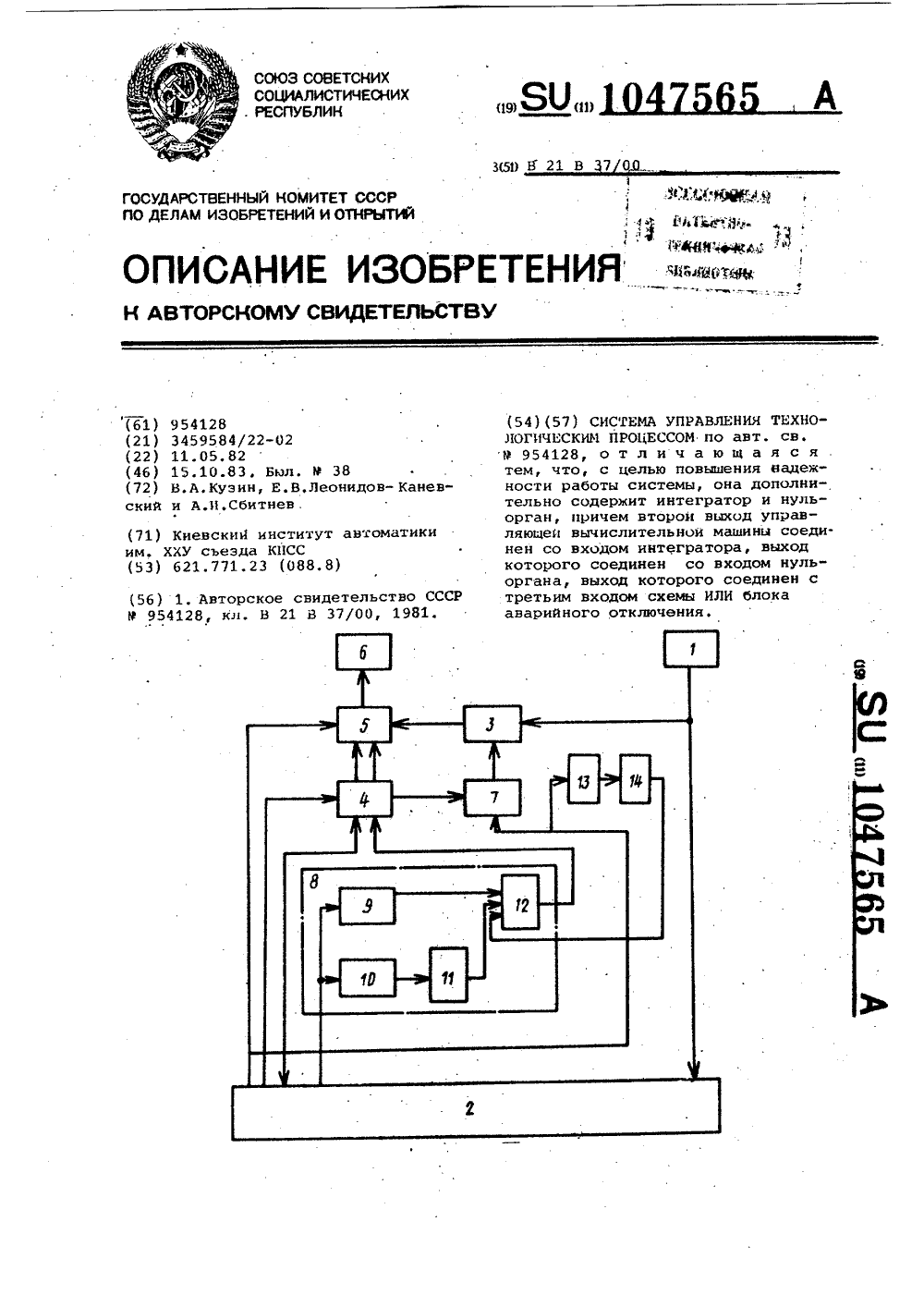
,Леонидованевс которого органа, в третьим в аварийног 6) 1. А 954128,ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ ОРСКОМУ С 8 ИДЕТЕЛЬСТВ(54)(57) СИСТЕМА УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ по авт. св. Р 954128, о т л и ч а ю щ а я с я тем, что, с целью повышения надежности работы системы, она дополнительно содержит интегратор и нуль- орган, причем второи выход управляюцеи вычислительнои машины соеди нен со входом интегратора, выходсоединен со входом нульыход которого соединен с ходом схем ИЛИ блока о отключения,Изобретение относится к автоматизированным системам управления технологическими процессами ( АСУ ТП)с помощью управляющих вычислительных машин ( УВМ) и может найти применение в АСУ ТП широкополосных станов горячей прокаткиЫСГП),Известна система управления технологическим процессом, содержащаяблок датчиков УВМ,блок локальныхрегуляторов, пульт управления,. выходкой .преобразователь, блок исполнительных механизмов, дискретныйинтегратор с памятью и блок аварийного отключения,причем выход блокадатчиков соединен с первыми входамиблока локальных регуляторов и УВМ,второй вход которой соединен,с первьщ выходом пульта управления, второйи третий выходы которого соответственно соединены с первым и вторымвходами выходного преобразователя, апервый вход - с выходом блока аварийного отключения, вход которого соединен с первым выходом УВИ, второйвыход которого соединен с третьимвходом выходного преобразования,четвертый вход которого соединен с .выходом блока локальных регулятороввторой вход которого соединен с выходом дискретного интегратора, выходвыходного преобразования соединенсо входом блока испытательных механизмов четвертый выход пульта управления соединен с первым входомдискретного интегратора с памятью,второй выход УВМ соединен со вторым.третий выход УВИ соединен со вторымвходом пульта управления 1 1 .Известная система имеет недостаточную надежность. работы, связаннуюс отсутствием в ней средств, позволяющих отключать канал уйравления от УВМ при возникновении искажений на ее выходе. Результатыфункционирования программного обеспечения ( ПО) и полученные при этомданные характеризуются некоторойограниченной достоверностью. Первичными причинами снижения достоверности обработанной управляющейинформации на выходе УВМ могут бытьискажение исходных данных, поступающих от внешних абонентов; невыявленные ошибки в ПО; непредусмотренныевоздействия обслуживающего персоналаоператора) .Указанные причины могут являтьсяисточниками возникновения аварийныхситуаций на объекте управления в результате, . например, проявления скры.той ошибки ПО. При этом техническиесредства УВМ.работают исправно. Следствием проявления ошибок в ПО в условиях применения УВИ в АСУ ТП ШСГПможет являться, например, поломканакимных винтов, забуривание полосыи др., что ведет к снижению производительности работы стана, потерям металла. дить о возможности сбойной ситуации в системе. Ввод в систему нуль-органа поэ 40 воляет фиксировать момент возникновения сигнала, отличного от нуля, на выходе интегратора.Связь выхода нуль-органа с третьим входом схемы ИЛИ блока аварийного отключения позволяет проиэводить отключение УВМ от объекта вслучае возникновения сбоя ПО,На чертеже представлена блок-схема системы управления технологическим процессом.Система содержит блок 1 датчиков УВМ 2, блок 3 локальных регуляторов, 50 пульт 4 управления, выходной преобразователь 5, блок 6 исполнительных механизмов, дискретный интегратор 7 с памятью, блок 8 аварийного отклонения, содержащий элемент 9 задержки на включение, элемент 10 задержки на отключение, схему 11 НЕ и схему 12 ИЛИ, интегратор 13 ибО нуль-орган 14, причем выход блока 1 датчиков .соединен с первыми входамиУВМ 2 и блока 3 локальных регуляторов,второй вход УВМ 2 соединен с первым выходом пульта 4 управления,второй и третий выходы которого соЦель изобретения - повышениенадежности работы системы.Укаэанная цель достигается тем,что в систему управления технологическим процессом дополнительновведены интегратор и нуль-орган,причем второй выход УВМ соединен с 1 О входом интегратора, выход которогосоединен со входом нуль-органа, выходкоторого соединен с третьим входомсхемы ИЛИ блока аварийного отключения.15 Применение интегратора позволяетсуммировать напряжение управляюще"го сигнала во,времени и тем самымиметь на выходе последнего сигнал,по которому можно судить о правильности выдачи управляющих сигналовУВМ. Затем используется известноесвойство центрированных стационарных случайных процессов, заключаю"щееся в том, что математическоеожидание случайной величины - нуль,следовательно при нормальной работесистемы результатом суммированияуправляющих сигналов с УВМ долженбыть нуль или величина, близкая кнему. При сбоях ПО илй УВМ, когдасистема начинает выдавать неправильные управляющие сигналы на объектрегулирования, на выходе интегратора спустя некоторое время, опреде"ляемое выбранной постоянной интегрирования, появляется сигнал, отличный от нуля, по которому можно суответственно соединены с первым и вторым входами выходного преобразователя 5, четвертый выход - с первым входом дискретного интегратора 7, а первый вход - с выходом блока 8 аварийного отключения, который является выходом схемы 12 ИЛИ, первый вход которой соединен с выходом эле" мента 9 задержки на включение, а . второй - с выходом схемы 11 НЕ, вход которой соединен с выходом элемента 10 задержки на отключение, а входы элементов 9 и 10 соединены с пер- вым выходом УВМ 2, второй вход которой соединен с третьим входом выход ного преобразователя 5, четвертый 15 вход которого соединен с выходоМ блока 3 локальных регуляторов, второй выход УВМ соединен со входом интегратора 13, выход которого соединен со входом нуль-органа 14, выход которо 2 О го соединен с третьим входом схемы 12 ИЛИ.Интегратор 13 служит для суммирования управляющего сигнала, имеющего случайный характер. Постоянная 25 интегрирования выбирается из условия конкретного технологического процесса.сНуль-орган 14 служит для фиксиро- вания момента появления на выходе ин- ЗО тегратора 13 заданного напряжения, при котором нуль-орган 14 выбирается в соответствии с параметрами технологического процесса.Устройство работает следующим образом.35Режим работы системы задается опе ратором с помощью пульта 4 управления. Он же задает исходные данные прокатки: толщину и ширину. полосы, допуски, скорость прокатки и т.п.40 Выбираются также постоянная интЕгрнрования интегратора 13, порог срабатывания нуль-органа 14, УВМ 2 рас- считывает для выбранных исходных дан" ных оптимальные уставки начальной настройки локальных регуляторов 3, которые выдаются на пульт 4 по третьему выходу УВМ 2.В исходном состоянии на выходах интегратора 13 и нуль-органа 14 нулЬ, 50 Второй выход УВМ 2 подключен черезвыходной преобразователь 5 ко входу блока б исполнительных механизмов. При входе полосы в зону действия датчиков 1, например, в прокатную клеть, сигналы от последних поступают в УВМ 2 для обработки по заданным алгоритмам. в результате чего УВМ выдает управляющий сигнал, поступающий на третий вход блока 5, откуда после преобразования, управля- ф ющий сигнал поступает на исполнительные механизмы б, например, иа нажимные винты клети. Одновременно, управляющий сигнал поступает на вход интегратора 13. При нормальной: 65 работе на первом выходе УВМ появляется последовательность импульсов, .которые поступают на входы элементов 9 и 10 задержки. На выходе элемента 9 задержки 10 - постоянно нуль, а на выходе элемента 10 задержки 10 - единица, что обусловлено наличием на входах элементов. 9 и 10 задержки сигнала с первого выхода УВМ 2. На выходе схемы 12 ИЛИ - нуль, так как на всех ее трех входах нули. При нормальной работе ПО и. нормальном ходе технологического процесса на вход интегратора 13 поступают сигналы разной полярности, распределенные по нормальному закону, в результате суммирования которых на выходе интегратора 13 устанавливается величина, близкая к нулю, или в пределах, устанавливаемых оператором.При сбое ПО системы нормальный закон распределения управляющих сигналов на выходе УВМ, как правило, нарушается. Это приводит к тому, что на вход интегратора 13 поступают сигналы преимущественно одного знака, что приводит через некоторое время к воэ" никновению на его выходе сигнала, отличного от нуля или другой выбраннои величины. Как только величина сигнала на выходе интегратора 13 достигает величины порога срабатывания нуль-органа 14, на выходе последнего возникает единица, которая поступает на третий вход схемы 12 ИЛИ, в пульт 4 управления, отключается от УВМ канал управления и подключается канал управленияот локальной системы. Единица" с выхо-. да схемы 12 ИЛИ, попадая на первый вход пульта 4, подключает на второй вход выходного преобразова теля 5 выход локального регулятора 3Управляющее воздействие в регуляторе 3 рассчитывается на основании информации с датчиков 1, уставок пульта 4, рассчитанных при пуске системы управления, а также управляющих сигналов УВМ, выдаваемых последней в момент, предшествующий сбою, которые хранились в памяти интегратора 7. В соответствии с заданным алгоритмом регулятор 3 вырабатывает управляющий сигнал, поступаниций после преобразования в блоке 5 на вход исполнительных механизмов. При сбое технических средств, т.е. собственно УВМ, прекращается генерация импульсов на первом выходе УВМ. В случае прекращения генерации на первом выходе УВМ появляется отличный от нуля потенциал, по истечении времени задержки на выходе элемента 9 появляется единица, кото рая через схему 12 ИЛИ поступает наЗаказ 7810/9 Тираж 816 ПодписноеВНИИ 11 И Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб д. 4/5 филиал ППП "Патент", г. Ужгород, ул, Проектная, 4 первый вход пульта 4 управления. В случае прекращения генерации от УВМ по истечении времени задержки на выходе элемента 10 появляется нуль, который инвертируется схемой 11 НЕ, единица через схему 12 ИЛИ поступает на первый вход пульта 4. В результате чего в обоих рассмотренных случаях канал управления от УВМ отключается, включается канал управления от локального регулятора 310Управление от локального регулятора 3 может производиться как в случае сбоя ЙО, так и по инициативе оператора. В последнем случае оператор с помощью пульта 4 задает 15 начальные уставки и включает локаль. ный регулятор 3.Сигналы датчиков 1 поступают на первый вход блока 3 регуляторов, который вырабатывает управляющие сигналы, поступающие в блок 5 преобразователей на исполнительные механизмы 6. В режиме ручного управления опе- . ратор с помощью пульта 4 подает на входы преобразователя 5 управляющие. уставки, которые после преобразования поступают на исполнительные механизмы 6. 1Таким образом, применение интегратора, подключенного к управляющему выходу УВМ и нуль-органа, подключенного к выходу интегратора, позволяет идентифицировать ситуацию сбоя УВМ по ПО и отключать канал Управления от УВМ и тем самим повысить вероятность предотвращения поломки технологического оборудования, т.е. повысить надежность управления технологическим процессом. Применение данной системы позволит повысить надежность функционирования АСУ ТП в случаях сбоев ПО по сравнению с базовым объектом АСУ ТП регулирования толщины полосы ШСГП.
СмотретьЗаявка
3459584, 11.05.1982
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС
КУЗИН ВАСИЛИЙ АЛЕКСАНДРОВИЧ, ЛЕОНИДОВ-КАНЕВСКИЙ ЕВГЕНИЙ ВЛАДИМИРОВИЧ, СБИТНЕВ АНАТОЛИЙ ИВАНОВИЧ
МПК / Метки
МПК: B21B 37/00
Метки: процессом, технологическим
Опубликовано: 15.10.1983
Код ссылки
<a href="https://patents.su/4-1047565-sistema-upravleniya-tekhnologicheskim-processom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления технологическим процессом</a>
Устройство соединения интеграторов

Номер патента: 146097
Опубликовано: 01.01.1962
Автор: Неслуховский
Метки: интеграторов, соединения
...схему Вб, Перед вводом каждого переполнения код в данном разряде регистра гасится. Гашение выполняется вентильной схемой Вб через запрещающий вход, Выбор переполнений ЛХ и ЛУ при такой системе построения программного управления производится так же, как и в большинстве ЦДА по адресам АЛХ и АЛУ. Выборка из регистра РЛ 5 приращений ЛХ и ЛУ осуществляется с помощью вентильных схем В 2, ВЗ и В 4.В схемах на фиг. 2, 3, 4 и 5 набор кодов каждого адреса производится коммутацией временных импульсов ВИ (1, 2, 3 и - 2, и - 1, п). Временные импульсы выбираются по номерам разрядов, имеющих коды 1 Выбор кодов для каждого интегратора во времени производится вентильными схемами В 1, В 2 ВУ - 1, ВЛ, управляемых от выходных шин коммутатора,...
Детектор квазиравновесия (его варианты)

Номер патента: 1012191
Опубликовано: 15.04.1983
Авторы: Волков, Памфилов, Прокунцев, Шаронов
МПК: G05B 1/01
Метки: варианты, детектор, его, квазиравновесия
...вектора сигнала О, и отношение амплитуды какой составляющей сигнала Ои к амплитуде сигнала Оо нужно определить. При определении отношения амплитуды ( д синфазной составляющей сигнала Ц, к амплитуде сигнала 0 о на первом такте преобразования сигна управления открывает ключ 5.1на время от О до Ж при ОЧсТ(/2 и 3 Я/2 С Ю 2 и и на время от 7 с до 2 Ж при В 72 с ЗЖ/2. Однако вследствие задержек Ь срабатывания ключа имеет место фазовая погрешность о, и напряжение Ои через ключ 5,1 поступает на интегратор 7;1 в течение интервала вре-мени от (О+Ь 1) до (1 Г+ь 1), Выходное напряжение интегратора (фиг, 5, строка с) в конце первого такта интегрирования принимает значение1С 05055 ММИОиТ ОыТ3 сФ Й1Как видно из временных диаграмм ,(фиг. 5, строки...
Устройство для определения жесткости полосы в процессе непрерывной горячей прокатки

Номер патента: 1028399
Опубликовано: 15.07.1983
Авторы: Ковалев, Леонидов-Каневский, Ставнийчук
МПК: B21B 38/00
Метки: горячей, жесткости, непрерывной, полосы, прокатки, процессе
...обеспечивает определение коэффициентов пластической деформации ( жест кости 3 полосы, приМем устройство учитывает прогиб валков при прокатке, что значительно повышает точность определения. жесткости. полосы. устройство определяет среднее по ширине значение жесткости полосы в очаге деформации.Однако жесткость полосы с левой и правой сторон прокатной клети может иметь различное значение. - Это обуславливается рядом факторов, таких как неравномерный по шириненагрев полосы, неоднородность химического состава.полосы, разный уровень удельных натяжений и других. Неодинаковое по ширине значение жесткости полосы вызывает нарушение условия равенства вытяжек по ширине полосы и ведет к нарушению планшетности полосы, появлению серповидности...
Устройство для стабилизации экспозиции светового пятна на экране электронно-лучевой трубки

Номер патента: 1083408
Опубликовано: 30.03.1984
Авторы: Бусаргин, Ушаков, Шаршеналиев
МПК: H04N 5/68
Метки: пятна, светового, стабилизации, трубки, экране, экспозиции, электронно-лучевой
...интегрирования, а блок 5 слежения- моделирования в режим моделирования. Модулятор ЭЛТ 1 отсоединяется от шины "Корпус" и подключается к выходу цифроаналогового преобразователя 14. Блок 5 слежения-моделирования начинает вырабатывать сигнал О 5 Ф=Е(11 ж.,Е ,1:1 где Е (с) - суммарное значение осве 1. 5щенности ранее экспонированных иеще не погасших световых пятен (фоновая засветка от послесвечения люминофора), причем значение фоновойзасветки берется в моментпоступления синхроимпульса. Начало отсчета времени 1 в последнем выражениисовпадает с моментом С поступлениясинхроимпульса, а коэффициенты сС и/,ь есть относительные амплитуды и 55постоянные времени соответственно,характеризующие процесс послесвечения люминофора ЭЛТ 1, причем х1, а...
Преобразователь угла поворота вала в код

Номер патента: 1213543
Опубликовано: 23.02.1986
Авторы: Берсудский, Демкин, Кац
МПК: H03M 1/50
Метки: вала, код, поворота, угла
...времени ь к входу интегратора 6 на нем устанавливается напряжение, пропорциональное произвелденню О ь . Исходя из этого, для трех циклов интегрирования (фиг.2) можно записатьл Ц "л где 11, Б и Б - напряжения, подаваемые на интегратор, соответственл ллно в циклах , ьг и сз .Учитывая, что в соответствии с описанным порядком работы коммутато ра 5 УАО, ОдО, Б щ -Ц 1, а также постоянное соотношение длил л,л тельностей цикловиА л = Кь , и приняв длительность ( ь за единицу, получаемлЦ/0.1 = Кл - ЕХт.е. отношение напряжений выходных обмоток датчика может быть представ лено длительностью импульса, начин нающегося по окончании цикла ь ь и заканчивающегося при снижении10 15 20 положительного напряжения интегратора 6 до нуля.Так как...
Предыдущий патент: Устройство управления подачей эмульсии на многоклетевом стане
Следующий патент: Отводящий рольганг листового прокатного стана
Случайный патент: Устройство для испытания трубчатых образцов на осевое сжатие