Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
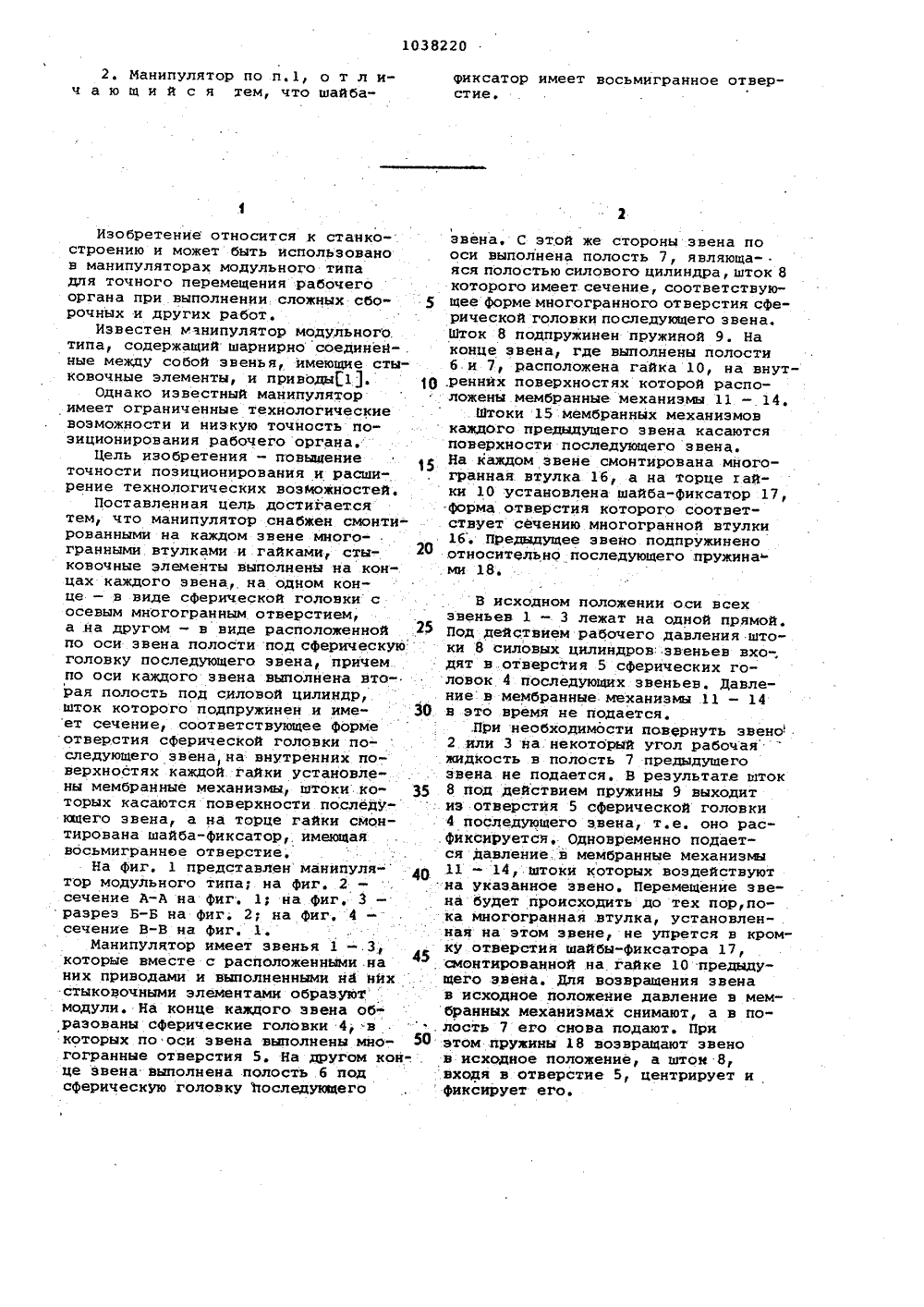
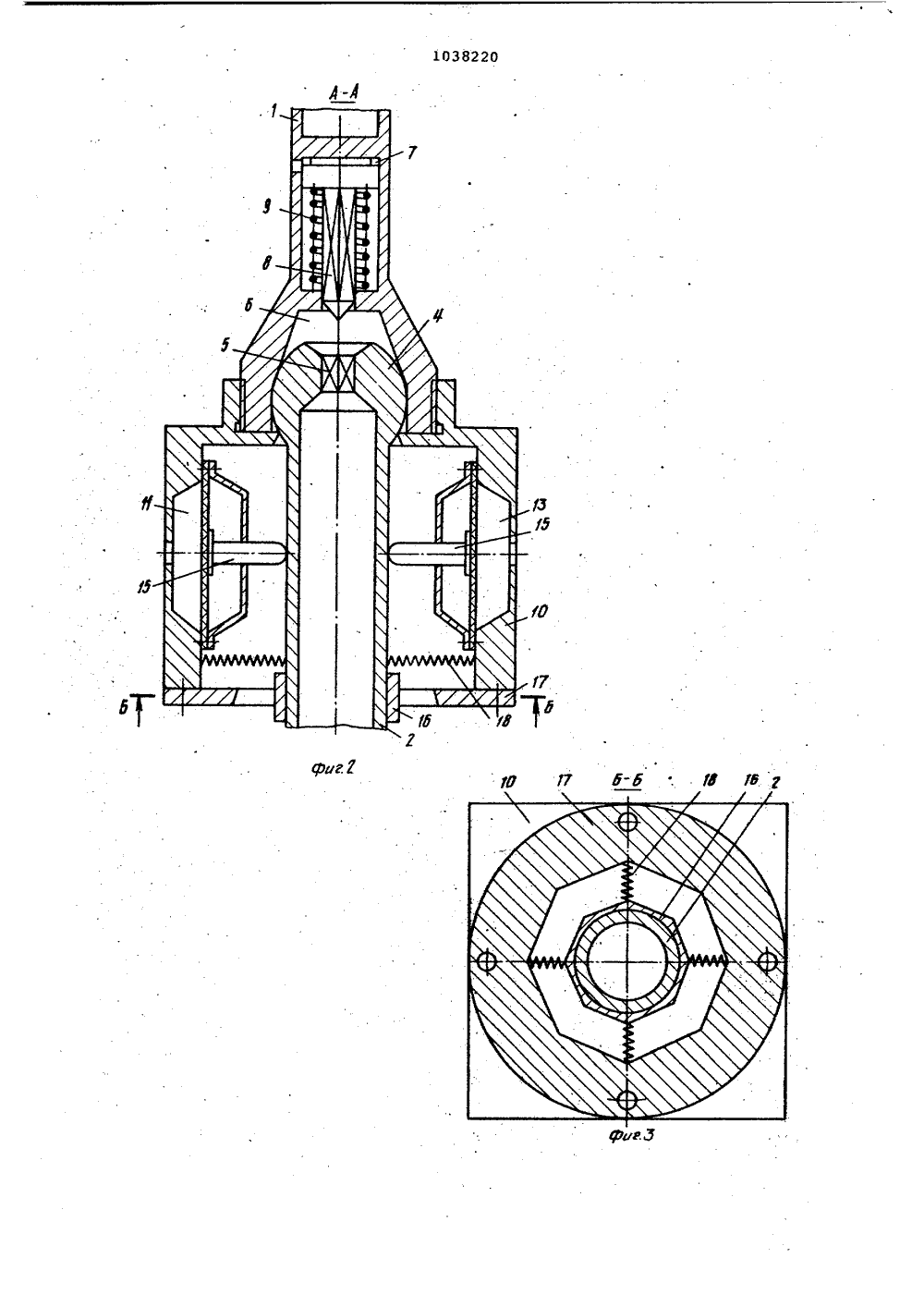
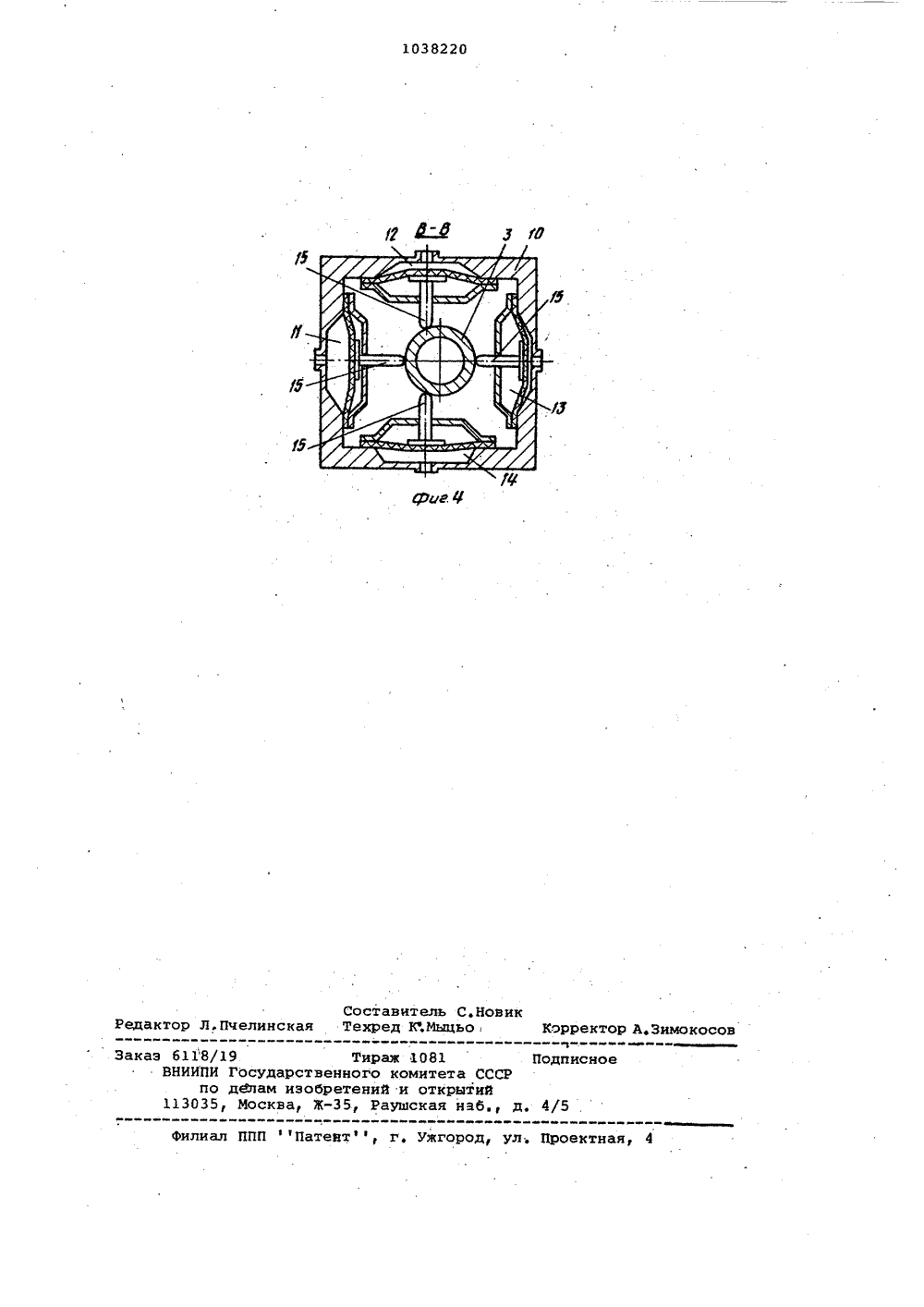
(5 П В 1 00 ИСАНИЕ ИЗОБРЕТЕНИЯ ОМУ СВИДЕТ У ЕЛЬСТВ АВТОРСН 772767 1057 0.08,8 .В.Хари евастоп й инсти 2-229.Автор о заяв 25 У 1(54) (57) 1, МАНИПу ТИПА, содержащий ш ные между собой з стыковочные элеме пример силовые ци ные механизмы, о с я тем, что, с ности позициониро ния технологическ ЛЯТОР МОДУЛЬНОГарнирно соединеенья, имеющие .ты и приводы,наиндры и мембранличающиелью повышеания и рах возможнос ния точ- сширетей,он ГОСУДАРСТВЕННЫЙ КОМИТЕТ СС ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНР снабжен смонтированными на каждомзвене многогранными втулками игайками, стыковочные элементы выполнены на концах каждого звена, наодном конце - в виде сферическойголовки с осевым многогранным отВерстием, а на другом - в виде распо,ложенной по оси звена полостипод сферическую головку последующего звена , причем по оси.каждого звена выполнена вторая полость под силовой цилиндр, шток которого подпружинен и имеет сечение,соответствующее Форме отверстиясферической головки последующего звена; на внутренних поверхностях каждой гайки установлены мембранные Емеханизмы, штоки которых касаются по,верхности последующего звена, а на торце гайки смоититована шайба Фиксатор. С1038220 2, Манипулятор по п.1, о т л ич а ю щ и й с я Тем, что шайбаИзобретение относится к станкостроению и может быть использованов манипуляторах модульного типадля точного перемещения рабочегооргана при выполнении сложных сборочных и других работ.Известен манипулятор модульного.типа, содержащий шарнирно соединен-,ные между собой звенья, имеющие стыковочные элементы, и приводы 1.Однако известный манипуляторимеет ограниченные технологическиевозможности и низкую точность позиционирования рабочего органа.Цель изобретения - повышениеточности позиционирования и расширение технологических возможностей.Поставленная цель достигаетсятем, что манипулятор снабжен смонти"рованными на каждом звене многогранными втулками и гайками, сты-,ковочные элементы выполнены на концах каждого звена, на одном конце - в виде сФерической головки сосевым многогранным отверстием,а .на другом - в виде расположенной 25по оси звена полости под сферическуюголовку последующего звена, причем.по оси каждого звена выполнена вторая полость под силовой цилиндр,.шток которого подпружинен и име- ЗОет сечение, соответствующее Формеотверстия сферической головки последующего звена, на внутренних поверхностях кажцой гайки установлены мембранные механизмы, штоки которых касаются поверхности последующего звена, а на торце гайки смонтирована шайба-фиксатор,. имеющая.восьмигранное отверстие,На Фиг. 1 представлен манипуля-тор модульного типау на Фиг. 2 -сечение А-А на фиг. 11 на Фиг, 3разрез Б-Б на Фиг; 2; на Фиг. 4 -сечение В-В на Фиг. 1.Манипулятор имеет звенья 1 в .3,которые вместе с расположенными ианих приводами и выполненными нй нйхстыковочными элементами образуют.модули. На конце каждого звена образованы сферические головки 4, вкоторых по оси звена выполнены многогранные отверстия 5. На другом кон-.це звена выполнена полость 6 подсферическую головку последующего Фиксатор имеет восьмигранное отверстие,звена. С этой же стороны звена по оси выполнена полость 7, являющаяся полостью силового цилиндра, шток 8 которого имеет сечение, соответствующее Форме многогранного отверстия сферической головки последующего звена, Шток 8 подпружинен пружиной 9На конце звена, где выполнены полости 6 и 7, расположена гайка 10, на внутренних поверхностях которой расположены мембранные механизмы 11 - 14.. Штоки 15 мембранных механизмов каждого предыдущего звена касаются поверхности последующего звена. На каждом звене смонтирована многогранная втулка 16, а на торце гайки 10 установлена шайба-Фиксатор 17, Форма отверстия которого соответствует сечению многогранной втулки 16. Предыдущее звено подпружинено относительно последующего пружина ми 18В исходном положении оси всех звеньев 1 - 3 лежат на одной прямой. Под действием рабочего давления штоки 8 силовых цилиндров: звеньев вхо-, дят в .отверстия 5 сферических головок 4 последующих звеньев. Давление в мембранные механизмы 11 - 14 в это время не подается..При необходимости повернуть звено 2 или 3 на некоторый угол рабочая жидкость в полость 7 предыдущего звена не подается. В результате шток 8 под действием пружины 9 выходит иэ отверстия 5 сферической головки 4 последующего звена, т.е. оно расфиксируется, Одновременно подается давление в мембранные механизмы 11 - 14, Штоки которых воздействуют на укаэанное звено. Перемещение звена будет происходить до тех пор,пока многогранная втулка, установленная на этом звене, не упрется в кромку отверстия шайбы-фиксатора 17, смонтированной на гайке 10 предыдущего звена. для возвращения звена в исходное положение давление в мембранных механизмах снимают, а в полость 7 его снова подают. При этом пружины 18 возвращают звено в исходное положение, а штои 8, входя в отверстие 5, центрирует и Фиксирует его.1038220 Составитель С.Новиктор Л,пчелинская Техред Кф,йыцьо . имокосов орре Подписи 118/19 Тираж 1081 ИИПИ Государственного комитета СССР по дблам изобретений и открытий 3035, Москва, Ж"35, Раушская наб., Заказ д. 4/ или ПП фПатентфф, г. Ужгород, ул. Проектна
СмотретьЗаявка
2772767, 31.05.1979
СЕВАСТОПОЛЬСКИЙ ПРИБОРОСТРОИТЕЛЬНЫЙ ИНСТИТУТ
ХАРИН ИГОРЬ БОРИСОВИЧ, КОПП ВАДИМ ЯКОВЛЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: манипулятор, модульного, типа
Опубликовано: 30.08.1983
Код ссылки
<a href="https://patents.su/4-1038220-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Механизм останова револьверного суппорта с горизонтально расположенной осью револьверной головки

Номер патента: 780967
Опубликовано: 23.11.1980
Авторы: Башлаев, Белявцев, Лейкин
МПК: B23B 21/00
Метки: головки, горизонтально, механизм, останова, осью, расположенной, револьверного, револьверной, суппорта
...4 с двух сторон к стойке 3, создавая зазор а между левым торцом пиноли и кронштейном 1, В отверстии шейки пиноли 4 установлена штан.5га 17 с рукояткой 18, Штанга поджата пружиной 19, а закрепленный в штиге штифт 20 р 1 ужит для фиксации положения пиноли при помощи паза 21 втулки 10. На станине уста.новлена коробка 22, в которой расположен микропереключатель с рычажной системой для перехода суппорта на "ползучую" подачу и отключения подачи суппорта с выдержкой времени. Рычажная система связан с механизмом упора подпружиненным штоком 23, на конце которого укреплена шайба 24. К механизму присоединен индикатор (на чертеже не показан) для точной настройки останова суппорт.Устройство работает следующим образом.После того, как на...
Способ наведения оси сварочной головки на стык при сварке пространственных изделий

Номер патента: 648360
Опубликовано: 25.02.1979
Авторы: Антоненко, Бондаренко, Гудима, Дьяченко, Загребельный, Маличенко, Раков, Сакало, Тимченко
МПК: B23K 9/10
Метки: головки, наведения, оси, пространственных, сварке, сварочной, стык
...существует зазор, то датчик выдает сигнал наибольшей величины для перемещения в направлении к изделию, Этот сигнал во вторичном преобразователе 10 усиливается и преобразуется в вид, необходимый для запуска генератора импульсов 1. Импульсы через блок 12 направляются в блок 8 формирования по координате 2, и соответствующий привод манипулятора 4 перемещает датчик 6 к изделию. При контакте датчика 6 с изделием (точка б) выходной сигнал датчика становится равным нулю. При этом генератор импульсов 11 запирается, перемещение по координате 2 прекращается и через блок 13 определения нуля проходит команда на включение устройства 9 ввода расчетной программы, В указанном положении координаты 2 точки б начальной точки 0 линии соединения 2 совпадают....
Способ контроля положения осей вращения, преимущественно цилиндрических шарниров руки манипулятора

Номер патента: 1785891
Опубликовано: 07.01.1993
Авторы: Зайцев, Сидорко, Стожков, Шастин
МПК: B25J 11/00
Метки: вращения, манипулятора, осей, положения, преимущественно, руки, цилиндрических, шарниров
...которыеческая схема манипулятора и указаны места принимают за контрольные. Затем произвоподвода щупов индикаторных приборов к дят поворот контролируемой оси 9 на уголосям вращения шарниров руки. 5 90,градусов вокруг оси Х 2, при этом измеМанипулятор содержитшарнирную ру- нится наклон звена 2, и регистрируют втоку, состоящую из последовательно сочле- рое показание индикаторов 10 и 11,ненных шарнирных звеньев 1 - 6, нижнее После завершения регистрации вторыхзвено 1 которой установлено на неподвиж- показаний индикаторных приборов 10 и 11ном основании 7. Основание 7 является 10 разворачивают ось вращения 8, котораябазовой поверхностью и совпадает с изме- перпендикулярна оси 9 и расположена нижерительной базовой поверхностью. Звено 1...
Механизм формования внутренней полости головки в стеклянных изоляторах

Номер патента: 252557
Опубликовано: 01.01.1969
МПК: C03B 9/32
Метки: внутренней, головки, изоляторах, механизм, полости, стеклянных, формования
...совпадает с центром подшипника 8,Верхний конец шпинделя снабжен диском5 14 с кольцевой проточкой, в которую входитролик 15 ползуна 16 отклоняющей пружинноймуфты 17, Г 1 олзун под действием пружин 18стремится отклонить шпиндель от вертикалив радиальном направлении.0 На средней части шпинделя на двух подшипниках установлен центрирующнй конус 19,подпираемый цилиндрическим фиксатором 20;который с помощью пружины 21 удерживаетшпиндель в вертикальном положении,5 От электродвигателя 22 через шестерни 28 и24 передается вращение отклоняющей муфте17 и ролику 16, который непрерывно обкатывается по кольцевой проточке диска 14.Механизм работает следующим образом.О Сжатый воздух подается в верхнюю полостьпневмоцилиндра 5 через отверстия 25. Пор. Пень...
Устройство для объемного деформирования полостей в головках стержневых деталей типа винтов

Номер патента: 686809
Опубликовано: 25.09.1979
Автор: Сундуков
МПК: B21K 1/50
Метки: винтов, головках, деформирования, объемного, полостей, стержневых, типа
...внизсбрасыватель удаляется иэ под матрицы и может сам выполнить роль съемника, если по каким-либо причинам обработанный винт остался на пуансоне,формула изобретения которого помещен отсекатель 18, приводимый в движение от опорного узла 19. Рабочая часть опорного узла выполнена в виде углубления с осью, совпадающей с осью матрицы, с опорной поверхностью, перпендикулярной к оси, диаметром, превьыающим диаметр головки винта, н глубиной, соответствующей расстоянию от торца головки винта, обращенного к стержневой части, до полости в головке.6 углубление опорного узла установ- Ю лен регулируемый упор 20 с глухим отверстием. Опорный узел подпружинен к станине.Устройство работает следующим образом. 15В зависимости от размера обрабатываемых...