Модель мышцы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1029761
Автор: Романов
Текст
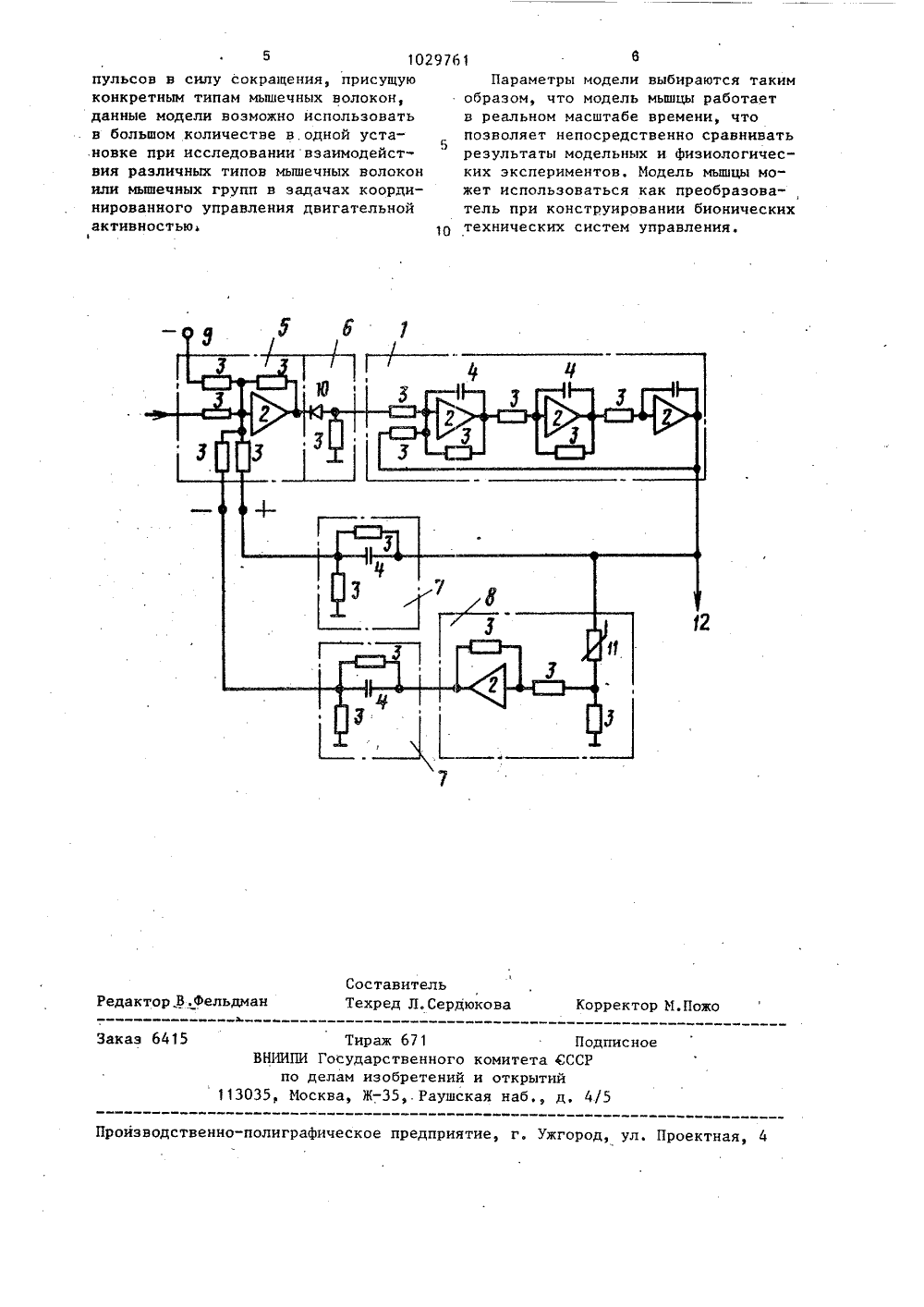
(51 ГОСУД АРС ПО ДЕЛАМ ОПИ ЕННЫЙ КОМИТЕТЗОБРЕТЕНИЙ И СССРФч АНИЕ ИЗОБРЕТЕ ЕТЕЛЬСТВ СКОМУ. С К АВ(56) Принг Дж. Модель мышцы, В сб, "Иоделирование в биологии", И 1963, . с, 85-125.Авторское свйдетельство СССР Р 765825, кл, С 06 С 7/60,26.07,1978.Авторское свидетельство СССР734798, кл. С 06 6 7/60, 10.01.1978(54)(57) МОДЕЛЬ ИЫИ 1 цц, содержащая блок формирования параболического напряжения и блок моделирования функции электромеханического преобразования мышечного волокна, выполненный из и последовательно соединенныхгинтегрирующих усилителей, причем в обратную связь (п=1) = х интегрирующих усилителей включен резистор, выход последнего интегрирующего усилителя является выходом модели и соединен с входом блока Формирования параболического напряжения и с первым входом первого интегрирующего усилителя блока моделирования функции электромеханического преобразования мышечного волокна, о т л ич а ю щ а я с я тем, что, с целью повышения точности моделирования и упрощения конструкции, она дополнительно содержит два пропорциональнодифференцирующих звена, сумматор и пороговый элемент, причем первый и второй входы сумматора являются соответственно информационным и установочными входами модели, третий и четвертый входы сумматора подключены соответственно к выходам пропорционально-дифференцирующих звеньев, , Я выход сумматора через пороговый элемент соединен с вторым входом пер- . вого интегрирующего усилителя блока моделирования функции электромеханического преобразования мышечного во- р локна, вход первого пропорциональнодифференцирующего звена подключен к выходу модели мьпнцы, вход второго пропорционально-дифференцирующего звена соединен с выходом блока форми- ф рования параболического напряжения. 3ОЪИзобретение относится к областимоделирования биологических системи может использоваться как объектпри исследовании нейтрональных механизмов управления мышечным сокращением.Известны различные модели мышцы,представленные набором упругих ивязких элементов, и математическиемодели, воспроизводящие особенности сокращения мышечных волокон. Существуют модели мышцы, воспроизводящиефункциональные свойства мышцы с помощью передаточных функций.Наиболее близким техническим решением к изобретению является модель .мышцы, содержащая блок электромеханического преобразования, выполнен-. . ный в виде п последовательно соединенных интеграторов с сопротивлениями в цепях обратной связи, нелинейный элемент и блок умножения, один из входов которого является входом модели мьппцы, другой вход присоединен к выходу нелинейного элемента, а выходк входу первого интегратора, выход последнего интегратора является выходом модели и соединен с входом нелинейного элемента. Недостатком прототипа является сложность реализации модели из-за применяемых блоков умножения и нелинейности, характеристику которой не-. обходимо набирать на диодноФзистив ных элементах. Переход к набору нелинейной зависимости, присущей другому типу мышечного волокна, требует перестройки всех диодно-резистивных элементов, количество которых определяется задаваемой точностью линейно-кусочной аппроксимации воспроизведения физиологической характеристики. Трудность перестройки нелинейной зависимости не позволяет исследо.вать на одной модели характеристики преобразования входного импульсного потока в выходное напряжение сокращения, присущее различным типам мьппц. В модели не учтены также динамические характеристики изменения силы сокращения, связанные со скоростью изменения входного импульсного потока. Все это сужает область применимостимодели при излучении механизмов развития силы реальных мьппц,Целью изобретения является повышение точности моделирования и упрощение конструкции модели. 10 15 20 25 30 35 ао 45 50 55 Эта цель достигается тем, что в модель мышцы, содержащую блок Формирования параболического напряжения и блок моделирования функции электро. механического преобразования мышечного волокна, выполненный из и последовательно соединенных интегрирующих усилителей, причем в обратную связь (и=1)=ых интегрирующих усилителей включен резистор, выход последнего интегрирующего усилителя является выходом модели и соединен с входом блока формирования параболического напряжения и с первым входом первого интегрирующего усилителя блока моделирования Функции электромеханического преобразования мышечного волокна, введены два пропорционально-дифференцирующих звена, сумматор и пороговый элемент, причем первый и второй входы сумматора являются соответственно информационным и установочными входами модели, третий и четвертый входы сумматора подключены к выходам пропорционально-дифференцирующих звеньев, выход сумматора через пороговый элемент соединен со вторым входом первого интегрирующего усилителя блока моделирования Функции электромеханического преобразования мышечного волокна, вход первого пропорционально-дифференцирующего звена подключен к выходу модели мышцы, а вход второго пропорционально-дифференцирующего звена соединен с выходом блока Формирования параболического напряжения.Структурная схема модели мышцы изображена на чертеже, содержащая блок 1 моделирования функции электро- механического преобразования мьппечного волокна, интегрирующие усилители 2, резисторы 3, конденсаторы 4, сумматор 5, пороговый элемент 6, пропорционально-дифференцирующие звенья 7,блок 8 формирования параболического напряжения, вход 9, устанавливающий начальный уровень возбудимости мышечного волокна, аналог мембранно-го потенциала, диод 10 и варистор 11.Величины резисторов 3 в блоке 1 определяют вид кривой одиночного сокращения, сумматор 5 и пороговый .элемент, моделирующий электровозбудимые свойства мышечной мембраны, звенья 7 и блок 8 моделируют свойство мышечных мембран изменять уро:вень возбудимости в зависимости от силы и скорости ее изменения.10297614дить в соответствии с решением ураве нениядц= К,а (р), А - Ка,(р)А Модель работает следующим образом В исходном состоянии, в отсутстви импульсов на входе модели, на выходах всех блоков напряжение равно ну 5 лю. При .поступлении на вход модели импульсов постоянной амплитуды и длительности, их амплитуда сравнивается с пороговым значением напряжения, установленным по входу 9 сумматора 5 и порогового элемента 6, моделирующих электровозбудимые свойства мышечной мембраны, и превышающая пороговое значение амплитуды входного импульса воздействует на вход первого интегрирующего усилителя блока 1, моделирующего функцию электромеханического преобразования, на выходе которого Формируется напряжение, соответствующее кривой разви тия силы сокращения реальной мышцы,. Напряжение с выхода модели мышцы поступает на вход звена 7 и блока 8, моделирующих свойство мышечных мемб 1 ран изменять уровень возбудимости, 25 и в соответствии с параметрами каждого дифференцирующего звена и пропорциональной составляющей входного сигнала напряжения на выходах звеньев 7, изменяют исходный уровень порогового сигнала, моделирующего электровозбудимые свойства мышечной мембраны. Для звеньев 7 и блока 8, моделирующих свойство мьппечных мембран изменять уровень возбудимости от силы сокращения и скорости его изменения, передаточная функция запишется в виде Тб Р ТР(К + ---- ) А-К+ )х1+Т Р 1+ ТуР 40л1к Агде К - коэффициент передачи постоянной составляющей для каждого звена 7, А" - величина активности силы сокращения на выходе 12 модели мышцы, 45ь Параболическая зависимость А силы сокращения при втором члене передаточной функции обеспечивается варистором 11. Существенным для моделиро-. вания является то, что напряжения 60 на выходе звеньев 7 суммируются в сумматоре 5, моделирующем электро- возбудимые свойства мышечных мембран, с разными коэффициентами, которые в конечном виде и определяют закономерность преобразования интенсивности входного импульсного потока в силу сокращения мышцыр т.е. изменение порогового уровня Ьи будет пропохаЕсли КК , то, когда сила сокращения невелйка ( при малых частотах следования импульсов на входе модели), превалирует первый член уравнения и увеличивается возбудимость мышечного волокна, так как снижается порог и вырастает превышение амплитуды входного импульса над исходным уровнем. мембранного потенциала, следствием,чего является превышение силы сокращения на 2,3 и 4 импульса, столь характерное для реальных мышц. При дальнейшем увеличении частоты следования импульсов сила сокращения достигает такого значения, что возрастает влияние второго члена уравнения, и эффективность возбуждения начинает падать из-за увеличения порога, т.е, снижения амплитуды импульса на выходе элемента б, воздействующего на блок 1, моделирующего Функцию электромеханического преобразования. Таким образом, изменением величины коэффициентов К и К легко подбирается на модели характеристика преобразования интенсивности входного импульсного потока в силу активного сокращения, характерную для различных типов мьппцы, Коэффициенты в передаточных функциях с звеньев 7 позволяют воспроизвести в модели динамические характеристики изменения свойств мышечных мембран, присущие тоническим или фазическим, быстрым или медленным мышечным волокнам.Таким образом, с помощью введен-. ных узлов с соответствующими характеристиками преобразования входных сигналов и их структурных связей промоделировано свойство мышечного волокна изменять характеристики электровозбудимости мембран в заси симости от силы сокращения, что по- зволило воспроизвести средствами моделирования закономерность преоб- . разования входного импульсного по- . тока в силу сокращения. Использование типовых звеньев в передаточных характеристиках делает модель легко воспроизводимой, а использование сов". ременных операционных усилителей для реализации этих звеньев малогабаритной. Кроме легкости настройки модели для реализации характеристик преобразования частоты следования им102976 10 Составитель Техред Л.Сердюкова ктор В,фельдм рректор И.Пож каз 641 1 Поднного комитета АЗССРтений и открытийРаушская наб., д, 4/ Тираж ВНИИПИ Государст по делам изоб 035 Москва, Жисно изводственно-полиграфическое предприятие, г. Ужгород, ул. Проектная пульсов в силу сокращения, присущуюконкретным типам мышечных волокон,данные модели возможно использоватьв большом количестве в.одной уста.новке при исследовании взаимодействия различных типов мышечных волоконили мышечных групп в задачах координированного управления двигательнойактивностью1 1 вПараметры модели выбираются таким образом, что модель мышцы работает в реальном масштабе времени, что позволяет непосредственно сравнивать результаты модельных и физиологических экспериментов, Модель мышцы может использоваться как преобразователь при конструировании бионических технических систем управления.
СмотретьЗаявка
3414316, 31.03.1982
ИНСТИТУТ ФИЗИОЛОГИИ ИМ. И. П. ПАВЛОВА
РОМАНОВ С. П
МПК / Метки
МПК: G06G 7/60
Опубликовано: 23.12.1987
Код ссылки
<a href="https://patents.su/4-1029761-model-myshcy.html" target="_blank" rel="follow" title="База патентов СССР">Модель мышцы</a>
Модель мышцы

Номер патента: 1164746
Опубликовано: 30.06.1985
Автор: Романов
МПК: G06G 7/60
...масса грузов, которые может удерживать пассивная мьшпКа 1 растягиваясь под действием этих грузов. В модели массы грузовзадаются в блоке 17 моделирования механических свойств внешней среды делителем 30, в котором с целью упрощения принципиальной схемы масса моделируется набором резисторов на входе операционного усилителя. Дели. тель 30 осуществляет операцию деления.исходя из следующих соображенщ. Коэффициентусиления Операционного 45усилителя выражается формулой ЕР =шфа или а = - .шСопоставляя это выражение с зави; симостью напряжения 0 в,от 0 проводим следующую аналогию:Цвак= а 1 Ко "в Р Квк = шт,е, при постоянстве сопротивления КПд 0 вх интерпретируется как сила Р 1 воздействующая на вход блока 17 и развиваемая мышечным волокном,...
Устройство для моделирования мышечного сокращения

Номер патента: 1503832
Опубликовано: 30.08.1989
Автор: Максименко
МПК: A63B 23/04
Метки: моделирования, мышечного, сокращения
...длительность импульса разряда 1 значительно меньше длительности экспоненты Т. После прохождения первой дифференцируюшей цепочки 4 образуются биполярные остроконечные импульсы, которые после прохождения первого ограничителя 5 имеют одну полярность и следуют с задержкой Сь На выходе второго ждущего мультивибратора получается серия импульсов прямоугольной формы, задержанная по отношению к аналогичной серии прямоугольных импульсов на время Ть После прохождения второй дифференцируюшей цепочки 7, второго ограничителя 8, на выходе5 10 15 20 формула изобретения 30 35 40 45 50 5третьего,ждущего мул ьтивибратора 9 получается серия импульсов, но уже следующая с задержкой 2. На выходе и-го блока задержки формируется серия прямоугольных...
Устройство для поддержания нервно-мышечного блока

Номер патента: 1424791
Опубликовано: 23.09.1988
Авторы: Антонец, Карпенко, Сиверский, Суслов
МПК: A61B 5/00
Метки: блока, нервно-мышечного, поддержания
...8 за счет установки заданного начального значения в четвертом счетчике 18. После поступления на вход четвертого счетчика 18 определенного количества импульсов, число которых зависит от заданного объема вводимой дозы, четвертый счетчик 18 переходит в состояние 100000 и импульс переноса (выход триггера старшего разряда) прекращает работу дозируюцсего устройства 20. После временной паузы, заданаемой блоком 1 управления (это время порядка 60 с, лстаточное для того, чтобы релаксацт началн вонать), на перноч выходе блока 1 уц равления вновь появляется серии ичу ьсон раздражения и цикл работы понтор- еся.,лс начала появления серии имцульсов раздражения на третьеч выходе блока 1 управления появляется сигнал начальной устангнки, который ставит...
Устройство для моделирования генераторно-нагрузочного узла модели энергетических систем

Номер патента: 327497
Опубликовано: 01.01.1972
МПК: G06G 7/635
Метки: генераторно-нагрузочного, модели, моделирования, систем, узла, энергетических
...- реакивная составляющ:я тока.С учетом выражений (1 - 3) имеем:(7) Ър = (ао +а 1 +а 2 12),1= (1. 1+6 Г +6 г 1).Напряжение Ьч снимаемое с одного блока БК установки коэффициентов функционального преобразователя ФП подается на линейный модулятор ЛЛ 1 ь стоящий в канале регулирования величины активной мощности, где умножается на сигнал постоянного напряжения,1)= - 1 (Оо 1 +1 + 12 12) 1( )ЯоИКак следует из формул (7) и (8), активный и реактивный токи нагрузки состоят из трех составляющих, первые з которых пропорциональны 1l, вторые составляющие це зависят от Р, а третьи составляющие по амплитуде обратно пропорциональны величине напряженя в узле нагрузки,Выражения (4), (7), (8) положены в основу построения модели нагрузки, как стои,- ка...
Модельный блок для изготовления керамических форм по выплавляемым моделям

Номер патента: 513784
Опубликовано: 15.05.1976
Автор: Миникес
МПК: B22C 7/02
Метки: блок, выплавляемым, керамических, модельный, моделям, форм
...крепление мо делей.Целью изобретения является обеспечениевозможности выполнения пцтателей с любым малым сечением. Это достигается тем, что блок снабжен стяжками, скрепляющими кол лектор с собранными на нем моделями с верхней цилиндрической частью литниковой чаши, минуя шлаковцк.На чертеже показан предлагаемый модельный блок.15 Модельный блок для изготовления керамической формы по выплавляемым моделям выполняют цз модельных масс на основе мочевцны. Блок включает литнцковую чашу 1, имеющую верхнюю цилцндрцческую и нижпою ко ническую части, шлаковцк 2 и пцтателц 3.Шлаковик крепится к конической части лцтниковой чаши ребрами 4. Модели 5, например турбинные лопатки, объединены общим коллектором 6. Крепление лцтццковой системы 25 и...
Предыдущий патент: Электрический соединитель
Следующий патент: Механизм запирания полуформ литьевой машины
Случайный патент: Выплавка стали в дуговых электрических печах