Устройство для определения параметров динамических звеньев систем автоматического регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1004981
Автор: Орлов
Текст
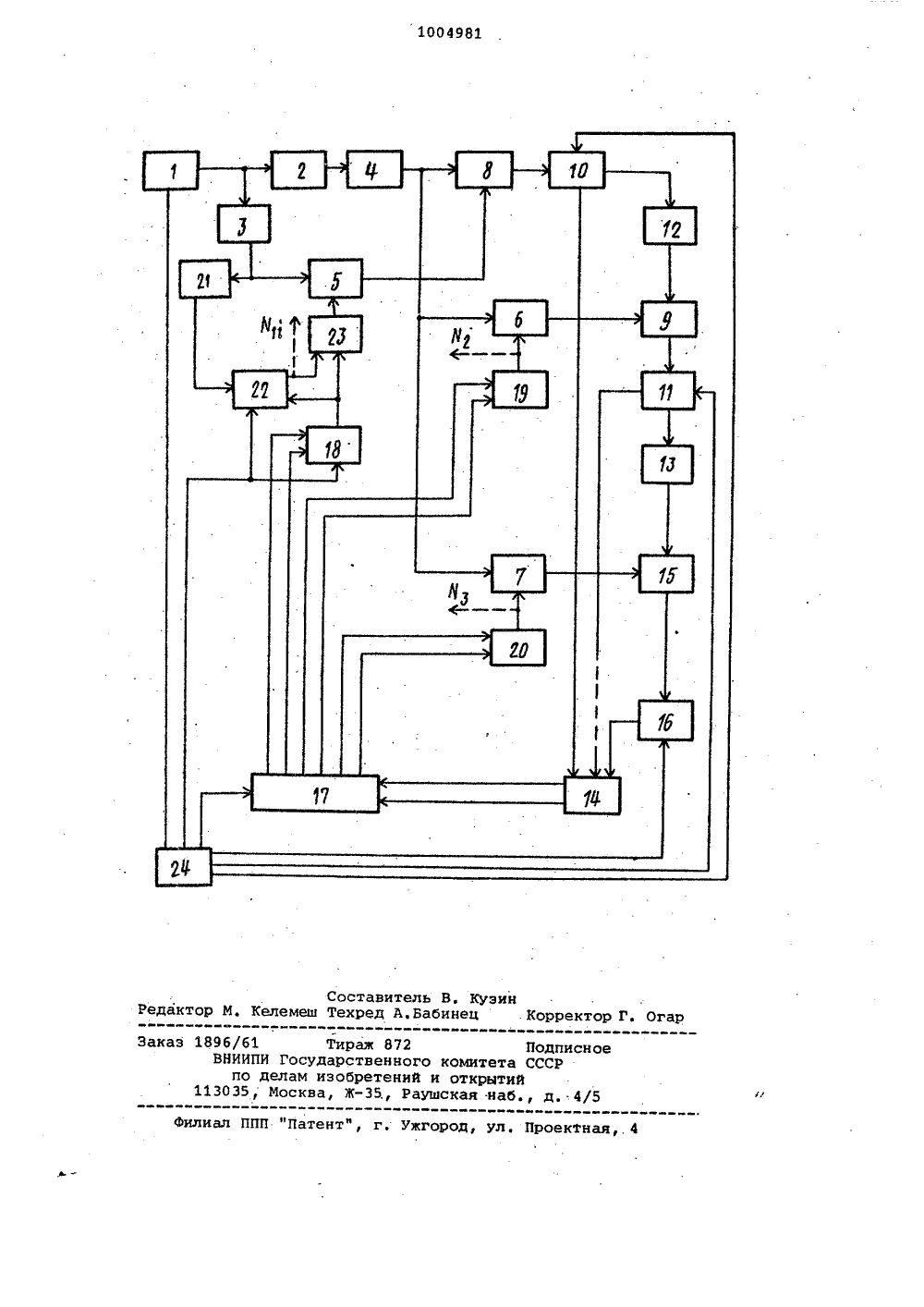
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Совз СоветскикСоциалистическихРеспублик и 11004981(22) Заявлено 24.07. 81 (21) 3321327/18-24с присоединением заявки Но -(23) Приоритет -Опубликовано 1503,83,Бюллетень Мо 10Дата опубликования описания 15,03. 83 И) М. Кп.з С 05 В 23/02 Государственный комнтет СССРпо делам нзобретеннй н открытнй.С. П. Орловй.Ь1 3:Куйбыаевский ордена Трудового Красного 1 намеви,.политехнический институт им. В, В. Куйбйаева- Ъь(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВДИНАМИЧЕСКИХ ЗВЕНЬЕВ СИСТЕМ АВТОМАТИЧЕСКОГОРЕГУЛИРОВАНИЯ 1Изобретение относится к измерительной технике и может быть использовано для идентификации звеньев систем автоматического регулирования. По основному авт, св, Р 499557 известно устройство, содержащее источник входного сигнала, связанный с входами динамического звена и преобразователя входного сигнала, соединенные последовательно первый блок вычитания, первый ключ и первый интегратор, включенные последовательно второй ключ и второй интегратор, третий ключ и блок управления, соответствующие выходы которого соединены с управляющими входами источника входного сигнала и ключей, второй. блок вычитания включен между выходом первого интегратора и входом второго ключа, третий блок вычитания - между выходом второго интегратора и входом третьего ключа, три цифровых делителя напряжения, причем вход первого из них связан с выходом преобразователя входного сигнала, а выход - с вычитающим входом первого блока вычитания, входы второго и третьего цифровых делителей напряжения соединены с выходом преобразователя выходного сигнала,а их входы - соответственно с вычитающими входами второго и.третьегоблоков вычитания, блок управляющихимпульсов, коммутатор и три реверсивных счетчика, входы которых подключены к соответствующим выходам коммутатора, а выходы соединены с управляющими входами цифровых делителейнапряжения, входы блока управляющихимпульсов связаны со вторыми выходамн всех ключей, а его выходы - с одним входом коммутатора, с другимвходом которогосоединен выход бло ка управления 1).Однако в известном устройствестатический коэФФициент передачизвена ойределяется в одной точке ха рактеристики, т.е. при одном фиксированном значении входного сигнала, ив результате при идентификации звеньев с нелинейной статической характеристикой возникает значительная погрешность в определении всех параметров.Цель изобретения - повышение точности устройства.Цель достигается тем, что в устройство для определения параметровдинамических звеньев систем автоматического регулирования дополнительно введены последовательно соединенные аналогоцифровой преобразователь, блок памяти, элемент ИЛИ, выход которого подключен к управляющему входу первого цифрового делителя напряже ния, а второй вход - к выходу первого .реверсивного счетчика и к второму входу блока памяти, третий вход которого соединен с третьим выходом блока управления и с установочным О входом первого реверсивного счетчика, причем вход аналогоцифрового преобразователя подключен к выходу преобразователя входного сигнала,На чертеже приведена функциональ ная схема предложенного устройства.Устройство включает источник 1 входного сигнала, динамическое звено 2, преобразователь 3 входного сигнала, преобразователь 4 выходного сигнала, первый цифровой делитель 5 напряжения, второй цифровой делитель б напряжения, третий делитель 7 напряжения, первый блок 8 вычитания, второй блок 9 вычитания, первый ключ 25 10, второй ключ 11, первый интегратор 12, второй интегратор 13, блок 14 управляющих импульсов, третий блок 15 вычитания, третий ключ 16, коммутатор 17, первый реверсивный счетчик 18, второй реверсивный счетчик 19, третий реверсивный счетчик 20, аналогоцифровой преобразователь 21, блок 22 памяти, элемент ИЛИ 23, блок 24 управления.Устройство работает следующим образом,Динамическое звено 2 описывается дифференциальным уравнением второго порядкаа ун + а у + у М(х)х, где х и у. - входной и выходной сигналы динамического звена,ар, а - постоянные параметры,подлежащие определению; М(х) - нелинейная статическаяхарактеристика динамического звена.Преобразователи 3 и 4 входного и выходного сигналов преобразуют сигналы х и у в напряжения0:ах, 0аю " бьгде щ и в - коэффициенты преобра 2зования.В первом .такте производится кусочно-линейная аппроксимация нели О нейной характеристики М(х), Для этого блок 24 управления вырабатывает сигнал, запускающий источник 1 входного сигнала, а также с помощью ключа 10 переключает выход блоха 8 вы- Я читания на вход блока 14 управляющихимпульсов,Источник 1 входного сигнала вырабатывает сигнал х, например, ступен.чатой Формы с такими интервалами,что переходный процесс в звене 2 успевает закончиться,Блок 14 усиливает сигнал рассогласования и в зависимости от его зна,фа выдает импульсы по одному иэ выходов, которые в первом такте черезкоммутатор 17 подключены к управляющим входам реверсивного счетчика 18,Счетчик 18 управляет коэффициентомпередачи цифрового делителя 5 напряжения, В результате во время постоянства сигнала х- выполняется равенствогде с. - .время достижения установившегося значения выходным сигналом при х х.щ сопяй(1 - количество точек аппроксимацииК .(х ) - коэффициент передачи цифрового делителя 5 напряжения в момент времени , определяемый выражениемК = С йм 1 1 Йгде С - постоянный коэффициент;И,1 - цифровой код в реверсивномсчетчике 18 в момент времени сВ момент времени с цифровой код в счетчике 18 пропорционален значению нелинейной статической характеристики звена 2 при хх(х ) = фОдновременно аналогоцифровой преобразователь 21 преобразует сигнал х в цифровой код, который поступает на адресный вход блока 22 памяти. В это же время сигнал от блока 24 управления разрешает запись по данному адресу в блок 22 содержимого счетчика 18 Таким образом, после первого такта в блоке 22 памяти по соответствующим значениям х адресам записан массив значений М(х ), аппроксимирующих нелинейную статическую характеристику динамического звена 2.Бо втором такте блок 24 управления перевсдит блок 22 памяти в режим считывания и по установочному входу сбрасывает реверсивный счетчик 18 импульсов в нулевое состояние. Одновременно вырабатывается входной сигнал, выход блока .8 через ключ 10 подключается к выходу интегратора 12, а выход блока 9 через ключ 11 соединяет30Цепь управления коэффициентом передачи К цифрового делителя 6 напряжения отраба ывает равенствоО(с) = К О , (1)Из (1) следуетаСаТ Мьгде С - постоянный коэффициент;М - код в счетчике 19;40Т - постоянная времени интегРатора 12,В третьем такте блок 24 управленйя переключает выход блока 9 через ключ 11 на вход интегратора 13, а 45 выход блока 15 через ключ 16 соединяется с входом блока 14, выход которого коммутируется на вход реверсивного счетчика 20 через коммутатор 17. Реверсивный счетчик 19 находит ся в режиме хранения кода, реверсивный счетчик 18 находится в нулевом состоянии, а цифровым делителем 5 напряжения управляет блок 22 памяти.Управление коэффициентом передачи Кз цифрового делителя 7 напряже 35 ся с выходом блока 14 управляющих импульсов, выходы которого переключаются на входы реверсивного счетчика 19 через коммутатор 17,При этом Форма входного сигнала х можетбыть произвольной с условием, 5 что через время сЪ с выходной сигнал у примет установившееся значение. При изменении входного сигнала х аналогоцифровой преобразователь 21 рырабатывает адресные коды, по кото рымиз блока 22 памяти считываются коды, соответствующие 1 с(х; ), которые через логическую схему ЙЛИ 23 поступают в цифровой делитель 5 напряжения. 5Таким образом, моделируется нелинейная характеристика М(х) динами:ческого звена 2, интегратор 12 интегрирует разность сигналов щ к(х)х -в у, а вго выходное напряжения равно 201О - - (в (х)х - щ,у)ас4 Т 4Фф(е у + а у ).+=о +О25Через время с ъ,си производная у Оои при у(0)=у(0) 0 .имеем ния йроисходит до выполнения равенстваО, (с) - К О (С),где О - выходное напряжение интегралтора 13.Следовательно,Эа С Т Т МЭо з 1 гэгде С - постоянный коэфФициент;ЪТ - постоянная времени интегратора 13;Мз - код в счетчике 20,Таким образом, после трех тактовпараметры ар и а линейной части передаточной функции динамическогозвена 2 определяются цифровыми кодами М и М в соответствующих реверсивных счетчиках, Параметры 1 сх; )аппроксимации нелинейной статической характеристики определяются цифровыми кодами М (. =. 1,1) в блоке 22 пам ти.Таким образом, предложенное устройство позволяет учесть нелинейность статической хараКтеристики динамического звена и эа счет этогоповысить точность определения всехего параметров.Формула изобретенияУстройство для определения параметров динамических звеньев систем автоматического регулирования по авт. св. Р 499557, о т л и ч а ющ е е с я тем, что, с целью повыаения точности, оно содержит последовательносоединенные аналогоцифровой преобразователь, блок памяти, элемент ИЛИ, выход которого подключен к управляющему входу первого цифро 1 вого делителя напряжения, а второй вход - к выходу первого реверсивного счетчика и к второму входу блока памяти, третий вход которого соединен с третьим выходом блока управления и с ус гановочным входом первого реверсивного счетчика, причем вход аналогоцифрового преобразователя подключен к выходу преобразователя входного сигнала.Источники информации, принятые во внимание при экспертизе1, Авторское свидетельство СССР Р 499557, кл, С 05 В 23/02, 1976 (прототип).1004981 Составитель В. Кузинемеш ТехрЕд А.Вабинец Корректо Редактор гар иал ППП "Пате л. Проектная,.4 Заказ 1896/61 Тираж 872 ВНИИПИ Государственного по делам изобретений 113035, Москва, Ж., РаушПодписноомитета СССРоткрытийкая наб , д 4/5
СмотретьЗаявка
3321327, 24.07.1981
КУЙБЫШЕВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
ОРЛОВ СЕРГЕЙ ПАВЛОВИЧ
МПК / Метки
МПК: G05B 23/02
Метки: динамических, звеньев, параметров, систем
Опубликовано: 15.03.1983
Код ссылки
<a href="https://patents.su/4-1004981-ustrojjstvo-dlya-opredeleniya-parametrov-dinamicheskikh-zvenev-sistem-avtomaticheskogo-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для определения параметров динамических звеньев систем автоматического регулирования</a>
Электромагнитный дефектоскоп

Номер патента: 1250930
Опубликовано: 15.08.1986
МПК: G01N 27/90
Метки: дефектоскоп, электромагнитный
...Формируется первый интервале, -с, (4 б) и запускается генератор22 меток. Счетчик 25 меток отсчитывает заданное количество меток Я.По мере дальнейшего перемещения детали в интервале с, -с(фиг. 4 в) запускается генератор 23 меток, счетчик 26 меток отсчитывает Р меток; винтервале с, -с работает генератор24 и счетчик 27 меток отсчитываетК меток (фиг. 4 г),После отсчета заданного количества меток счетчики 25-27 меток поцепи обратной связи запирают соответствующие генераторы 22-24 меток.Длительность временных интервалов зависит от разброса скоростейконтролируемой детали, поэтому час-тота каждого генератора 22-24 метоквыбирается исходя из того, чтобыобеспечить необходимое число метокда(е при максимальной скорости кон 1250930тролируемой...
Устройство для контроля блоков оперативной памяти

Номер патента: 1336123
Опубликовано: 07.09.1987
МПК: G11C 29/00
Метки: блоков, оперативной, памяти
...Вход данных имеет постоянноенулевое состояние во время первого цикла адресного перебора теста (режим чтения 1/запись 0) и постоянное единичное состояние во время второго цикла адресного перебора теста (режим ЧТЕНИЕ О/ ЗАПИСЬ 1). Во время действиячетырехтактного сигнала ЧТЕНИЕ в двух первых тактах имеет место запрет чтения, в третьем такте раз решение чтения, в четвертом вновь запрет чтения, и выходные сигналы контролируемого блока оперативной памяти в соответствии с ее таблицей состояний/переходов отличаются от 15 этих двух режимов (при запрете чтения - обычно высокоимпедансное состоя. ние, при разрешении чтения - соответствующая записанная ранее информация О/1). Поэтому будут выявлены 20 такие неисправности, которые привели бы к...
Устройство для коррекции цифрового сигнала

Номер патента: 1431694
Опубликовано: 15.10.1988
МПК: H04N 1/00
Метки: коррекции, сигнала, цифрового
...представлена структурная электрическая схема устройства для коррекции циФрового сигнала. 10Устройство для коррекции циФрового сигнала содержит аналого-циФровой Преобразователь (АЦП) 1, вычислитель 2 коррекции, блок 3 памяти сигнала степени плотности изображения, блок 4 15 памяти сигнала ошибки и ключ 5.Устройство для коррекции циФрового сигнала работает следующим образом.Аналоговый сигнал поступает на АЦП 1, циФровой сигнал с выхода кото рого поступает соответственно на блок 3 памяти сигнала степени плотности изображения и на блок 4 памяти сигналя ошибки, с выхода которых циФровые сигналы поступают на вычислитель 25 2 коррекции, который обеспечивает расчет ошибок накопления для нескольких точек считывания и изменяет степень...
Устройство для приема кодовых комбинаций постоянного веса

Номер патента: 982054
Опубликовано: 15.12.1982
Авторы: Зубков, Ключко, Кузнецов, Николаев, Хромов
МПК: G08C 19/28
Метки: веса, кодовых, комбинаций, постоянного, приема
...регистр 1Далее она, преобразуетсяв двоичную шестнадцатиразрядную кодовую комбинацию с весом Р = 8 спомощью пороговых блоков 3 -3 и пос 16тупает в преобразователь 4 двоичного кода с постоянным весомв полный двоичный код. В этом преобразователе определяется первый 1 -йединичный разряд в исходной двоичной комбинации постоянного веса, изаписывается единичный симнол н соответствующийразряд выходного регистра,(на Фиг.1 не показан) преобразователя 4. Затем точно также преобраэуется следующая по старшинству единица равновесного двоичного кода. Такое преобразование осуществляют дотех пор, пока тринадцатираэрядная ком-,бинация полного двоичного кода, эа писанная в этом,регистре, не будет однозначно соответствовать 7 ненулевым разрядам исходной...
Управляемый делитель частоты следования импульсов

Номер патента: 1088136
Опубликовано: 23.04.1984
Автор: Шпилев
МПК: H03K 23/00
Метки: делитель, импульсов, следования, управляемый, частоты
...элемента И-НЕ 6, выход которого подключен к второму входу первого элемента И-НЕ 3, второй вход - к входу запуска триггера 7 и выходу Р-триггера 8, информационный, 20 вход которого соединен с шиной 10 старшего разряда кода управления, а вход синхронизации - с выходной шиной 5 и входом синхронизации регистра 9 хранения, кодовые входы которого соединены с шинами 11 млад. ших разрядов кода управления, а кодовые выходы " с кодовыми входами счетчика 4 импульсов младших разрядов, ЗО 1Устройство работает следующимобразом.Дискретный ряд значений частот сзаданным шагом 0 Е на выходе управляе.мого делителя частоты следования им- З 5пульсов можно представить следующимобразом:П, - )ЕЕН ф40 где Е - опорная частота на входеуправляемого делителя;К...
Предыдущий патент: Устройство для проведения многофакторного эксперимента
Следующий патент: Устройство для контроля неисправностей во входной и выходной цепях операционного усилителя
Случайный патент: Устройство для ранжирования чисел