Самонастраивающаяся система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1004971
Автор: Ковальчук

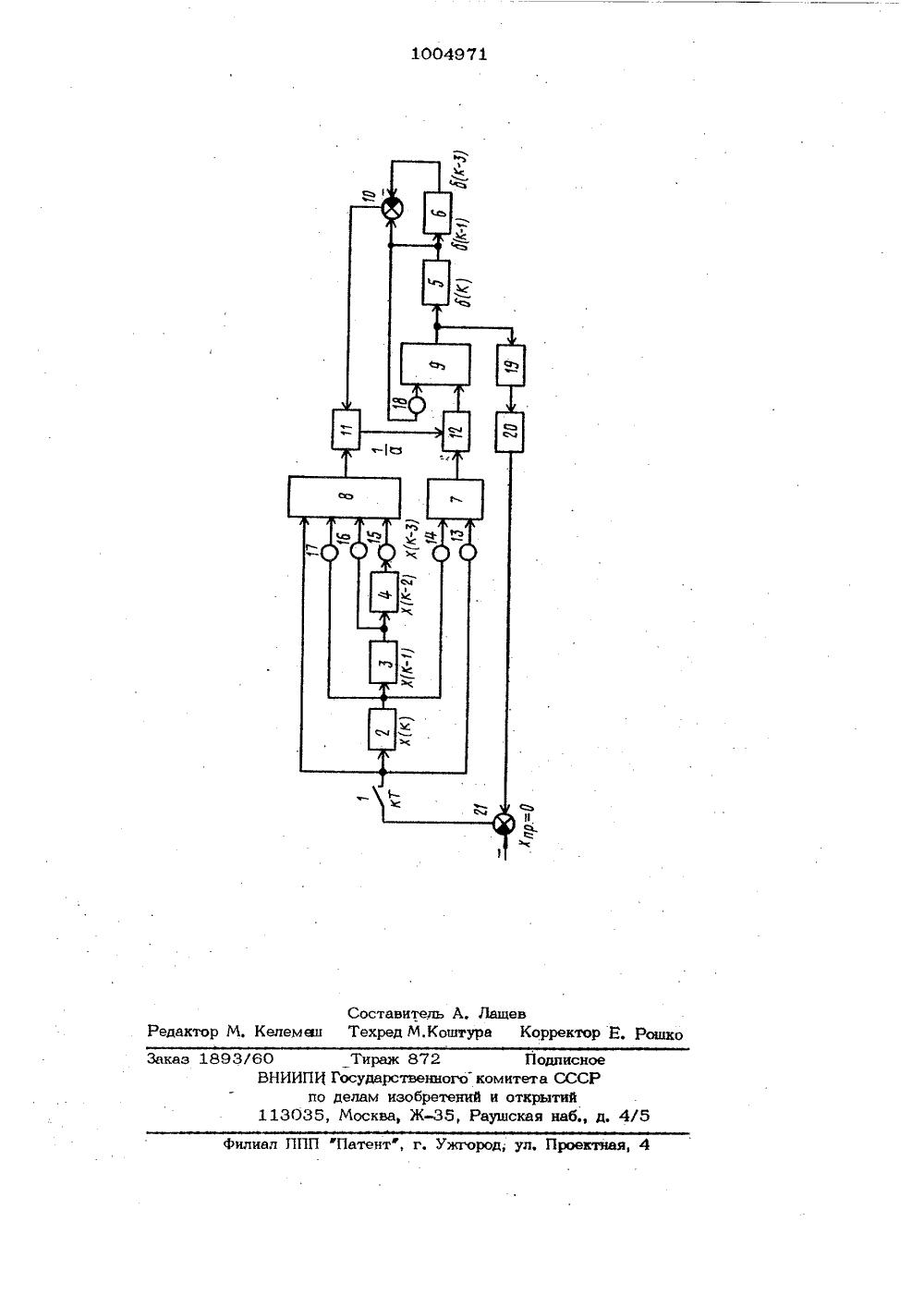
Текст
ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советски кСоциаиистическикРеспублик(23) Приоритет СССР Опубликовано 15.03.83. Бюллетень И 10Дата опубликования описания 15.03.83 пв делам лзааретелнв и вткрытий(54) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА 1Изобретение относится к дискретным беспоисковым самонастраивающимся системам автоматического управления для нейтральных обьектов второго порядка и может быть использовано, например, в самонастраивающихся системах управления движением летательных аппаратов при неизвестном заранее значении коэффициен,та эффективности управления обьекта, обеспечивающих заданное неизменное распределение собственных значений матрицы замкнутой системы. Из известных беспоисковых самонастраивающихся систем наиболее близкой к изобретению по технической сущности является самонастраивающаяся система, содержащая блоки памяти и последовательно соединенные делитель, умножи тель, первый сумматор, первый блок памяти, второй блок памяти и первый блок сравнения, второй вход которого соединен с выходом первого блока памяти и через последовательно соединенные первый 2усилитель, первый сумматор, третий блокпамяти, блок управления, второй блоксравнения и ключ - к четвертому блокупамяти, выход которого соединен с первым входом второго сумматора черезвторой усилитель и с первым входомтретьего сумматора через третий усилитель, выходы четвертого и пятого усилителей соединены с соответствуюшеливходами второго сумматора, выход шестого усилителя соединен с вторым входом третьего сумматора,.Недостатком известного устройстваявляется его сложность, обусловленнаяналичием большого количества блоковпамяти, суммирования, умножения и деле;ния, аппаратурная реализуемость. которых особенно затруднительна, и дополнительного корректирующего устройства, 2 о что снижает общую надежность устройства е Цель изобретения - повышение надежности системы,10049 71 фвеяло подключен к входу (входу уменьшаемого) блока сравнения 10 и к входу блока 6 памяти на два периода дискретности, выход которого соединен с вторым входом (входом вычитаемого) блока сравь нения 10. Выход сумматора 9 подключен к входу блока 5 памяти на период дискретности, а также к блоку памяти 19 - фиксирующему звену нулевого порядка - и через него к объекту управления 20.Работа устройства состоит в запоминании дискретных значений сигналов Х(1-1),Х(%-2), Х(К)с помощью блоков 2- 4 памяти на период дискретности и д(К), д(-Ис помощью блока памяти 5 на один период, дискретности и на два периода дискретности блока памяти 6; суммировании сигналов х(Ц,Х(М),Х Ь), Х(1 с"3)с соответствующим их усилением усилителями 13-17 с помоцъю суммато- роЬ 7 и 8; формировании с помощью блока сравнения 10 сигнала д (М)- д"(М); делении этого сигнала на выходной сигнал сумматора 8 с целью идентификщии параметра объекта управления( р - фактическое возмущенное зчачение коэффициента эффективности управления обьекта); умножении выходного сигнала сумматора 7 на полученный сигнал - с выхода делителя 11 умножителем 1 Ъ; суммировании выходного сигнала блока памяти 5, усилению усилителем 18, с выходным сигналом умножителя 12,сумматором 9, на выходе которого формируется требуемое дискретное значение управляющего воздействия дЧЫ, Этот сигнал поступает на блок 5 памяти на период дискретности, выходной сигнал которого дфМ) поступает на вход блока памяти на два периода дискретности для формирова, ния сигнала сГЦс-Ц блок сравнения 10 и усилитель .1.8, а также сигнал И(Ф) поступает на фиксирующее звено нулевого порядка (блок памяти) 19 и через него на объект управления 20, Через время Ь= ЪТ, где Т - период дискретности системы (период замыкания ключа 1, или интервал времени, в течение которого на выходе фиксирующего звена нулевого порядка (блок памяти) 19 управляющее воздействие о(А) сохраняется неизменным), создаются условия для идентификации параметра обьекта управления - " ис 3 неизмеряемой координаты Х (Ц.На основе измеренного и прошедших(сохраненных в блоках памяти) значений сигналов изменяются выходные сигналы сумматоров 7-9 и блока сравнения 10,3Поставленная цель достигается тем, что в системе выход четвертого блока памяти через последовательно соединенные пятый и шестой блоки памяти соединен с входом пятого усилителя, выход пятого блока памяти соединен с входом четвертого усилителя, вход первого блока памяти соединен с четвертым входомвторого сумматора и входом шестого усилителя, выход третьего сумматора 10 соединен с вторым входом умножителя, выход первого блока сравнения соединен с первым входом делителя, вторым входом соединенного с выходом второго сум-, матора, 33На чертеже изображена самонастраивающаяся система.Система содержит ключ 1, четвертый, пятый и шестой, первый и второй блоки памяти соответственно 2-6, третий, вто- щ рой и первый сумматоры соответственно 7,8 и 9, первый блок сравнения 10, делитель 11, умножитель 12, шестой, третий, пятый, четвертый, второй и первый усилители соответственно 13-18, третий блок памяти 19, объект управления 20 и второй блок сравнения 21.Выход обьекта управления через ключ 1, замыкающийся через каждые Т, подключен через усилитель 14 к первому. входу сумматора 7, а также непосредственно к входу сумматора 8 и входу (блока 2 памяти на период дискретности. Выход этого блока памяти подключенчерезусилитель 14 ко второму входу суммато- фф ра 7, а также через усилитель 17 - к второму входу усилителя 8 й непосредственно - к входу блока 3 памяти на период дискретности, выход этого блока памяти непосредственно подключен к входу блока 4 памяти на период дискретности и через усилитель 16 - к третьему входу сумматора 8. Выход блока 4 памяти на период дискретности через усилитель 15 соединен с четвертым входом сумматора 8, выход которого подключен1 к входу (входу делителя) делителя 11, второй вход которого (вход делимого) соединен с выходом блока сравнения 10. Выход делителя 11 соединен с первым фф входом умножителя 12, а второй вход этого умножителя соединен с выходом сумматора 7. Выход умножителя непосредственно соединен с первым входом сумматора 9, а вход его через усилИ 3( тель 18 соединен с выходом блока 5 памяти на период дискретности. Также выход этого блока 5 памяти непосредстзаранее известной структуры с цельюобеспечения заданной цели оптимальногоуправления. Самонастраивающаяся система, с одержашая блоки памяти и последовательно соединенные делитель, умножитель, первый сумматор, первый блок памяти,. второй блок памяти и первый блок сравнения, второй вход котороГо соединен с выходом первого блока памяти и через последовательно соединенные первый усилитель, первый сумматор, третий блок памяти, блок управления, второй блок сравнения н ключ - к четвертому блоку памяти, выход которого соединен с первым входом второго сумматора через второй усилитель и с первым входом третьего сумматора через третий усилитель, выходы четвертого и пятого усилителей соединены с соответствующими входами второго сумматора, выход шестого усилителя соединен с вторым входом третьего сум,мато ра, о т л и ч а ю щ а я с я тем, что, с целью повышения надежности системы, в ней выход четвертого блока памяти через последовательно соединеннйе пятый и шестой блокифпамяти соединен с входом пятого усилителя, выход лятого блока памяти соединен с входом четвертого усилителя, входпервого блока памяти соединен с четвертым входом второго сумматора и входом шестого усилителя, выход третьего сумматора соединен с вторым входом умножителя, выход первого блока сравнения соединен с первым входом делителя, вторым входом соединенного с выходом второго сумматора. 1. Авторское свидетельство СССРпо заявке2890904/24,кл. 6 05 В 13/02, 1980 (прототип).% 100497 а с помощью делителя 11 вычисляется фактическое значение параметра объекта уцравлення. С помощью ключа 1, блоков памяти на период дискретности, усилителей 13 н 14, сумматоров 7 н 9 Э и умножителя 12 формируется оптимальный сигнал управления дф(1, который обеспечивает требуемый режим работы замкнутойсистемы при отсутствии начальной .информации о фактическом значе нии параметра объекта управления - .1 При этом характер переходного процессаС 3 . замкнутой системы не зависит от фактического значения коэффициента объекта управленияи определяется только фспредварительно оптимально заданными .собственными значениями матрицы замкнутой системы, Это приводит к обеспечению способности системы сохранять свои/динамические характеристики в заданных20 пределах при изменении условий ее функционирования непредвиденным образом.Преимуществом предлагаемой системы является ее простота, обусловленная требованием меньшего количества блоков, и, 25 следовательно, повышение ее надежности.Известно, что с точки зрения аппаратурной реализации наиболее трудоемкими ,и сложными являются операции деления, умножений, запоь.,нания и суммирования: 30 входных сигналов. В этом смысле предлагаемая дискретная свмонастраиваюшая . система является более экономичной.Предлагаемая дискретная самонастраивающаяся система имеет простую схему и выгодно отличается от известных ана-. логичных схем, так как для ее реализации требуется минимальное количество типовых .вычислительных устройств автоматики. Это позволяет не проводить дорогостоящие исследования при проектировании дискретной системы управления; так как регулятор способен .быстро (в течение .трех периодов дискретности) определить реальное фактическое значение коэффициента эффективности управления объекта, а затем определить требуемые значения коэффициентов закона управления формула изобретения Источники информации,принятые во внимание при эксперти=е1004971 А. Лащевтура Корректо Составите Техред И. едактор М. Келемед Роюко Тираж 872 Подписное ИПЦ Государственного комитета СССР по делам изобретений и открытий 035, Москва, Ж, Раушская наб., д
СмотретьЗаявка
3351857, 16.11.1981
СЕРПУХОВСКОЕ ВЫСШЕЕ ВОЕННОЕ КОМАНДНОЕ УЧИЛИЩЕ ИМ. ЛЕНИНСКОГО КОМСОМОЛА
КОВАЛЬЧУК ГЕННАДИЙ ИВАНОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 15.03.1983
Код ссылки
<a href="https://patents.su/4-1004971-samonastraivayushhayasya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система</a>
Устройство для включения блока параллельно соединенных цепей с последовательно включенными импульсными лампами накачки лазера с защитой

Номер патента: 988150
Опубликовано: 15.06.1983
Авторы: Гендель, Журавлев, Семашко
МПК: H02H 7/12
Метки: блока, включения, включенными, защитой, импульсными, лазера, лампами, накачки, параллельно, последовательно, соединенных, цепей
...), каждый из которыхподключен к выходу соответствующего порогового элемента 10 и с третьими входами 15 (информационныевходы ), каждый из которых соединенс выходом соответствующего третьего порогового элемента 11, с выходами 16 по числу входов 14, каждый иэ которых подключен к соответствующему управляющему нходу 7 блока поджига б и,с клеммой аварийнойсигнализации 17, и две группы разделительных конденсаторов 18, общее количество которых соответствует числу параллельных цепей ИЛНблбка 5.Блок контроля (см. фиг. 2), вырабатывающий команды на запуск блока поджига до включения всех цепейна предупреждение аварийных ситуаций, содержит группу первых элементов И 19, выход каждого из которых является соответствующимвыходом 16 блока контроля,...
Устройство для функционального технического диагностирования блока последовательно соединенных тиристоров

Номер патента: 1119136
Опубликовано: 15.10.1984
Авторы: Вейденберг, Зитар, Илькенс, Лейманис, Узарс, Храмцов
МПК: H02M 1/18
Метки: блока, диагностирования, последовательно, соединенных, технического, тиристоров, функционального
...блока последовательно соединенных тиристоров, снабженное блоком управления тиристорами, каждый из которых шунтирован делителем напряжения и КС-цепочкой, содержащее реагирующие органы, предназначенные для включения в рассечку между катодами тиристоров и КС-цепочками, выпрямители, подключенные к выходам реагирующих органов, дифференцирующую цепь, подключенную к выходам выпрямителей, и индикаторные элементы, введены триггер, три элемента временной задержки и два элемента И, причем выход дифференцирующей цепи подключен к первым входам элементов И и через первый элемент временной задержки - к первому входу триггера, второй вход которого предназначен для подклю 20 25 30 35 40 45 чения к выходу блока управления тиристорами, а выход...
Устройство для функционального технического диагностирования блока последовательно соединенных тиристоров

Номер патента: 1365235
Опубликовано: 07.01.1988
Авторы: Вейцман, Илькенс, Лаужа, Лейманис, Узарс, Феоктистов, Храмцов
МПК: H02H 7/10
Метки: блока, диагностирования, последовательно, соединенных, технического, тиристоров, функционального
...Н, - выходной сигнал элемента 8 временной задержки; 0 з,0 - выходные сигналы триггера 7 и3 1365триггера 6; П П - выходные сигналыэлементов И 9 и 10, появляющиеся принеконтролируемых переключениях отдельных тиристоров силового тиристор- .5ного блока 1,Устройство работает следующим образом.Диагностируемый силовой блокс последовательно соединенными тиристорами управляется блоком 2 управления, сигнал от одного из выходов которого поступает на формировательрасширитель 5 импульсов устройства.По переднему фронту выходного сигнала 15формирователя-расширителя 5 импульсаориентируется триггер 7, а по заднему - триггер 6, При приложении к блоку 1 обратного напряжения в процессекоммутации блок 4 выдает сигнал, обусловленный неодновременностью...
Устройство для исправления ошибок в блоке памяти

Номер патента: 868841
Опубликовано: 30.09.1981
Авторы: Ламовицкая, Семаков
МПК: G11C 29/00
Метки: блоке, исправления, ошибок, памяти
...модуля памяти, при этом, крайние выходы сумматоров 1-5 считаютсясмежными. А вторые входы указанныхэлементов И. 10-17 подключены к выходусоответствующего индикатора неисправностей 6-9,Принцип действия устройства основан на использовании свойств кода, определенного проверочной матрицей указанного вида. Для обеспечения возможности исправления ошибок, каждое записанное в памяти слово содержит 2избыточных, или контрольных, разряда,для которых отводятся два иэ общегочисла Й модулей памяти. Контрольнаячасть слова образуется в соответствиис информационной частью слова и проверочной матрицей, так, чтобы длякаждой строки матрицы контрольная сумма по модуль два всех разрядов слова,указанных положением единиц в этойстроке, при отсутствии ошибок...
Вычислительный блок к устройству для измерения угла наклона

Номер патента: 575473
Опубликовано: 05.10.1977
Авторы: Блознялис, Вайткевичус
МПК: G01B 7/30
Метки: блок, вычислительный, наклона, угла, устройству
...каждого индикатора отсчета устройства,измеряемого диапазона,тельный блок работает сл светового потока, например в них возникают сигналы,тупают на сумматоры 2, 3,умматоров формируются сигна, уп 10 наьЫе (.ОЯ.О и ЫИ 10 (Ттт 1,.Т ПаОТ На ГарЫОИ 1 ЧЕСКИЙ Прэоо,:.;у ГНОС тт я у 1 тОВ ПрнттЕМ На КВЯД Р .1 ОР -. ., 1 ЙЕТ Стт 1 НЙЛ 1 РОПОРНИОНЙЛЬЫЙ- .;, т тУ 0 а,тгт , 5 Стп на П ПР ОПОРтт 0.: т .Ы С ВЫХОЧСВ 1:Вадиат 000 В 4 И О , ,тп,.е .ОВ,О 11 Е 12 Щпо" 1" паот В Опое 6 сумут 1 ирОВаннят а Бы кЛ т;т - РО З а 1 10 ЯВП сЕТС 1 1 ПНа ПО3пропорпппапьпьуй Одася ас 1 т = сОБ тту. т;-.1,..:П: , - й ЭЕМЕНТакже СОдИен5 лоан,.МЧт 1 ПИНТСООВ 2 И 3 И На Вкод.1 - 1 т-- ; "тчутс,; а - О 1 ОгуПО 1 атгв;И т.от ПтВ;т 1 т ;тДВОЕН ньуВ б.уоОвыходно 1 сигнал...
Предыдущий патент: Регулятор с переменной структурой для объектов с запаздыванием
Следующий патент: Устройство для управления адаптивным роботом
Случайный патент: Касетная установка для изготовления изделий из бетонных смесей