Преобразователь перемещения в код
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Севетскик Социалистических Республик(61)Дополнительное к авт, свид-ву 2) Заявлено ЗО,101) 3352437/18-2 1 М. Кп. присоединением заявки Мо 6 08 С 9/О арствениый комитСССРделам изобретениИн открытий(0888) Опубликовано 28 Дата опубликован о юл лете ния 28 02,83 опис 2) Авторыизобретения инИ. Тимофеев Цент ое конструкторское бюр приборостро71) Заяви 54) ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КО перемещеий эле-:.мента,лок зап Изобретение относится к автомати- зации средств контроля и измерения и может быть использовано в преобразователях линейного перемещения или угла поворота вала в код в качестве промежуточного звена между чувствительными элементами (датчиками перемещения) и результирующим счетчиком импульсов.В преобразователях угол-код поворот входной оси можно условно разбить на единичные приращения, на появления которых реагируют чувствительные элементы преобразователя, вырабатывающие сигналы, которые суммируются на счетчике, обеспечивая теи самым информацию о суммарном повороте входной оси от некоторого начального положения. Поскольку входная ось преобразователя угол-код может . поворачиваться как по, так и против часовой стрелки, то для получения правильного значения иолного угла поворота сигналы чувствительного эле. мента должны суммироваться с учетом направления перемещения, а значит, при изменениях направления движения входной оси преобразователя уголкод счетчик должен переключаться со сложения на вычитание и наоборот,т.е. должен работать в реверсивном режиме 1.Известен преобразовательния в код, содержащий задающмент, два чувствительных элеинвертор, два элемента И и бдержки (.23.Недостатком такого преобразователя является наличие блока задержки, который формирует импульс опред,лен-ной длительности, тем саиым накладывая жесткие ограничения на скорость перемещения задающего элемента, т.е. на режим работы всего преобразователя еремещений в кодв целом.Наиболее близким к предлагаемому по функциональным возможностям и технической сущности является схема преобразования перемещения в дискретный сигнал, содержащая два элемента НЕ-И, два инвертора и четыре дифференцирующих цепочки 3 )На вход устройства преобразования ,поступают от двух датчиков перемещения импульсы (меандр), сдвинутые относительно друг друга на угол л/2. Период следования импульсов соответствует величине механического перемещения, а знак разности фаз Л/2 соответствует направлению перемещения, 1001135Сигналы направления от датчиков подаются на один из входов схем НЕ-И, в то время как вторые входы крестообразно (перекрестно) связаны с выходами этих схем. Разность фаз У/2 входных сигналов выделяется на схемах совпадения указанных схем НЕ-И и в зависимости от направления перемещения (знака разности фаз л/2) появляется на выходах схем НЕ-И в виде прямоугольных импульсов длитель О алостью У/2. С помощью первого (второго) инвертора достигается совпадение по времени отрицательных перепадов напряжения на входе дифференцирующих цепочек Д и Д (Д и Д) 15Недостатком данного преобразователя является низкая точность преобразования в условиях неравномерной скорости перемещения задающего элемента, определяемая наличием диффе О ренцирующих цепочек, которые накладывают ограничения на скорость перемещения задающего элемента (так же, как в аналогах). Этот недостаток имеет две стороны, Во-первых, это - ограничения на максимальную скорость перемещения задающего элемента, поскольку длительность .импульсов Т на выходах дифференцирующих цепочек должна быть меньше четверти периода последовательности импульсов с ныходов датчиков перемещения.Во-вторых, наличие дифференцирующих цепочек накладывает ограничения на минимальную скорость перемещения задающего элемента, поскольку при малой крутизне сигналов с выходов датчиков перемещечия сигналы на выходах дифференцирующих цепочек глогут быть недостаточны для срабатывания последующих узлов (счетчиков). Этот недостаток особенно важен в случае, если угол поворота вала задается вручную (например при ручном отслеживании входной величины) . Тогда скорость перемещения задающего элемента неранномерна и преобразование угла поворота вала в код осуществляется с ошибками, т.е. недостаточно точно. Кроме того, значительное количество логических элементов (элементы НЕ-И, инверторы, дифференцирующие цепочки) усложняет схему преобразователя.Цель изобретения - упрощение преобразователя перемещения в код и повышение точности преобразования, Для, 55 достижения поставленной цели в преобразователь перемещения в код, содержащий первый и второй элементы НЕ-И, первые входы которых соединены с первым и вторим датчиками пе- бО ремещения соответственно, выход первого элемента НЕ-И соединен с вторым входоМ второго элемента НЕ-И, выход которого соединен с входом первого Элемента НЕ-И, нведены третий и чет вертый элементы НЕ-И, первые входйкоторых соединены соотнетственно свыходами первого и второго элементовНЕ-И, входы которых объединены соответственно с вторыми входами третьего и четвертого элементов НЕ-И, ныходы которых являются выходами преобразователя перемещения в код.На фиг. 1 изображена схема преобразователя перемещения в дискретныйсигнал; на фиг. 2 - временная диаграмма работы преобразователя.Преобразователь перемещения в кодсодержит логические элементы НЕ-И1-4, Вход 5 устройства соединенный свыходом датчика перемещения (не показан), подключен к первому входуэлемента НЕ-И 3 и перному нходу элемента НЕ-И 1. Вход б устройства, соединенный с другим датчиком перемещения, подключен к первым входам элементов НЕ-И 2 и 4, Вторые входыэлементов НЕ"И 1 и 2 соединены с выходами элементов НЕ-И 2 и 1 и с нторыми нходами элементов НЕ-И 4 и 3 соответственно,Устройство работает следующим образом.Например, сигналы с выходов датчиков перемещения равны 1 (фиг. 2),где 1 - сигналы на входе 5 устройства; 2- сигналы на входе б устройства, 3 - сигнал на выходе элементаНЕ-И 1; 4 - сигнал на выходе элементаНЕ-И 2; 5 - сигнал на первом выходеустройства) б - сигнал на втором выходе устройства. В этом случае сигналы на выходах элеглентов НЕ-И 3 и 4равны О, поскольку функционированиекаждого из элементов НЕ-И 1-4 описывается следующим выражением=ху,где г - сигнал на выходе элементаНЕ-И;х,у- сигналы на входах элементов НЕ-И.При комбинации входных сигналов Ьх = 1, Ьх 2 = 0 сигналы на выходах не меняются, они равны О. При комбинации входных сигналов Ьх= О, Ьх 2=0 сигнал на первом выходе равен 1, сиг- нал на втором выходе не меняется (равен 0). При комбинации входных сигналов Ьу = О, Ьу 2 = 1 сигналы на обоих выходах равны 0 и т.д. Все время, пока задающий элемент поворачивается влево (против часовой стрелки), сигнал на первом выходе изменяется, а на втором - постоянен и равен О. Посчитав количество импульсов на перном выходе, можно определить перемещение задающего элемента влево (против часовой стрелки). Длительность выходных импульсов на первом выходе определяется только скоростью перемещения задающего элемента, ири скважности, равной 2, скважностьвыходных сигналов равна 4, При реверсе задающего элемента, т.е. придвижении вправо (по часовой стрелке),последовательность сигналов на входеустройства меняется (фиг. 2) и меняется вид выходных сигналов в соответствии с таблицей,Выхвх Вых0151 О Как видно изФиг. 2 и таблицы, сигнал на первом выходе не изиеняется, а на втором - изменяется, Подсчитав количество импульсов на втором входе, можно определить перемещения задающего элемента вправо (по часо вой стрелке). Подсчитав разность количеств импульсов на первом и втором выходах, можно определить суммарное перемещение задающего элемента (и направление, и величину пере мещения).Особенностью работы предлагаемого устройства является отсутствие явления "состязания" и неустойчивого выходного состояния элементов НЕ-Ц З 5 1 и 2 (которые внешне похожи на й - 5 триггер). Кроме того, при одинаковых входных сигналах сигналы на выходах устройства различны при перемещениях задающего элемента в различных направ.4 О лениях (так, например, при перемещении задающего элемента влево и при входных сигналах, равных О, сигнал на первом выходе равен 1, на втором выхоце - О, а при пеРемещении зада ющего элемента вправо и при тех же входных сигналах выходные сигналы противоположны). Первые два элемента НЕ-И представляют подобие Порядковой схемы" и обеспечивают выработку различных последовательностей сигналов при различных перемещениях задающего элемента. Вместо элементов НЕ-И могут быть использованы элементы И-НЕ. В этом случае изменяются только временные диаграммы работы устройства..Технико-экономиЧеский эффект предлагаемого устройства по сравнению с известными заключается, во-первых, в упрощении схемы преобразователя. Предлагаемое устройство содержит четыре 60 логических элемента НЕ-И (И-НЕ), которые могут быть реализованы на одном корпусе интеграторной микросхемы 155 серии, в то время как прототип содержит большее количество элемен тов, Во-вторых, в предлагаемо 1 устройстве повышается точность обработки входных сигналов в условиях неравномерного задающего элемента за счет отсутствия каких-либо элементов с временными зависимостями (блок задержки, дифференцирующие цепочки), тогда как известные устройства должны иметь скорость перемещения задающего элемента в определенных пределах.В качестве базового объекта принят преобразователь, серийно выпускаемый в ПНР 4 .Предлагаемое устройство по сравнению с базогым объектом проще за счет, того, что оно содержит только четыре логических элемента НЕ-И, а базовый объект содержит 4 дифференцирующих цепочки,8 элементов И, 2 элемента НЕ-ИЛИ, й 5 -триггер и более точно обрабатывает сигналы о перемещении задающего элемента, так как скважность выходных сигналов не зависит от скорости перемещения задающего элемента, тогда как в базовом объекте наличие дифференцирующих цепочек (также, как в прототипе), ограничивает (сверху и снизу) скорость перемещения задающего элемента.Формула изобретенияПреобразователь перемещения в код,содержащий первый и второй элементыНЕ-И, первые входы которых соединеныс первым и вторым датчикамиперемещения соответственно, выход первогоэлемента НЕ-И соединен с вторым входом второго элемента НЕ-И, выход которого соединен с вторым входом первого элемента НЕ-И, о т л и ч а ющ и й с я тем, что, с целью упрощения и повышения точности преобразователя, в него введены третий н четвертый элементы НЕ-И, первые ьходы которых соединены соответственно с выходами первого и второго элементов ЧЕ-И,входы которых объединены соответственно с вторыми входами третьего ичетвертого элементов НЕ-И, выходы которых являются выходами преобразователя перемещения в код.Источники информации,принятые во внимание при экспертизе1. Гитис Е.И, Преобразователи информации для электронных цифровых вычислительных устройств. Изд. 2-е, М.,"Энергия", 1970, с, 246.2. Авторское свидетельство СССРР 550662, кл. С 08 С 9/00, 1975.3. Патент Японии Р 53-11860,кл. 105 А 221, опублик. 1978 (прототип)4, Схема для определения направления вращения в частоту импульсов.1001135 ЮюраУ Составител Техред Л,П Сидоренкоь Корректор М Заказ 1401/58 ПодписноССР 4 1303 филиал ППП "Патент", г. Ужгород,ектна Редактор Л. Ворович Тираж 61 б ВНИИПИ Государствен по делам изобрете 5, Москва, Ж, Ра
СмотретьЗаявка
3352437, 30.10.1981
ЦЕНТРАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО ГИДРОМЕТЕОРОЛОГИЧЕСКОГО ПРИБОРОСТРОЕНИЯ
ТИМОФЕЕВ ВЛАДИМИР ИВАНОВИЧ, ДЫЛДИН СТАНИСЛАВ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G08C 9/00
Метки: код, перемещения
Опубликовано: 28.02.1983
Код ссылки
<a href="https://patents.su/4-1001135-preobrazovatel-peremeshheniya-v-kod.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь перемещения в код</a>
Магнитный преобразователь команд в электрические сигналы к устройствам для рентгенографии труб

Номер патента: 587880
Опубликовано: 05.01.1978
МПК: G01D 5/12
Метки: команд, магнитный, рентгенографии, сигналы, труб, устройствам, электрические
...камеру 3, заполненнуюкеросином, в котором помещен поплавок 2; магниточувствительные индикаторы 4 и 5 (язычковые реле); флажок б, жестко соединенный с поплавком и сигнализируюший о положении его и магнита 1; фиксаторы 7 и 8 крайних положений флажка, жестко закрепленные на крышке 9 корпуса преобразователя; камеру 3, установленную между крышками 9 и 10 корпуса преобразователя; опорные оси 11 и 12 поплавка (подковообразный - командный - магнит на эз чертеже не показан).587880 Составитель А. ДуханннТехред О. Луговая Корректор А. Гриценко Тираж 1112 Подписное Реда кто р А. Му радян Заказ 43/4 ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113033, Москва, Ж, Раушская наб., д. 4/3,Л ый:с.агнитный...
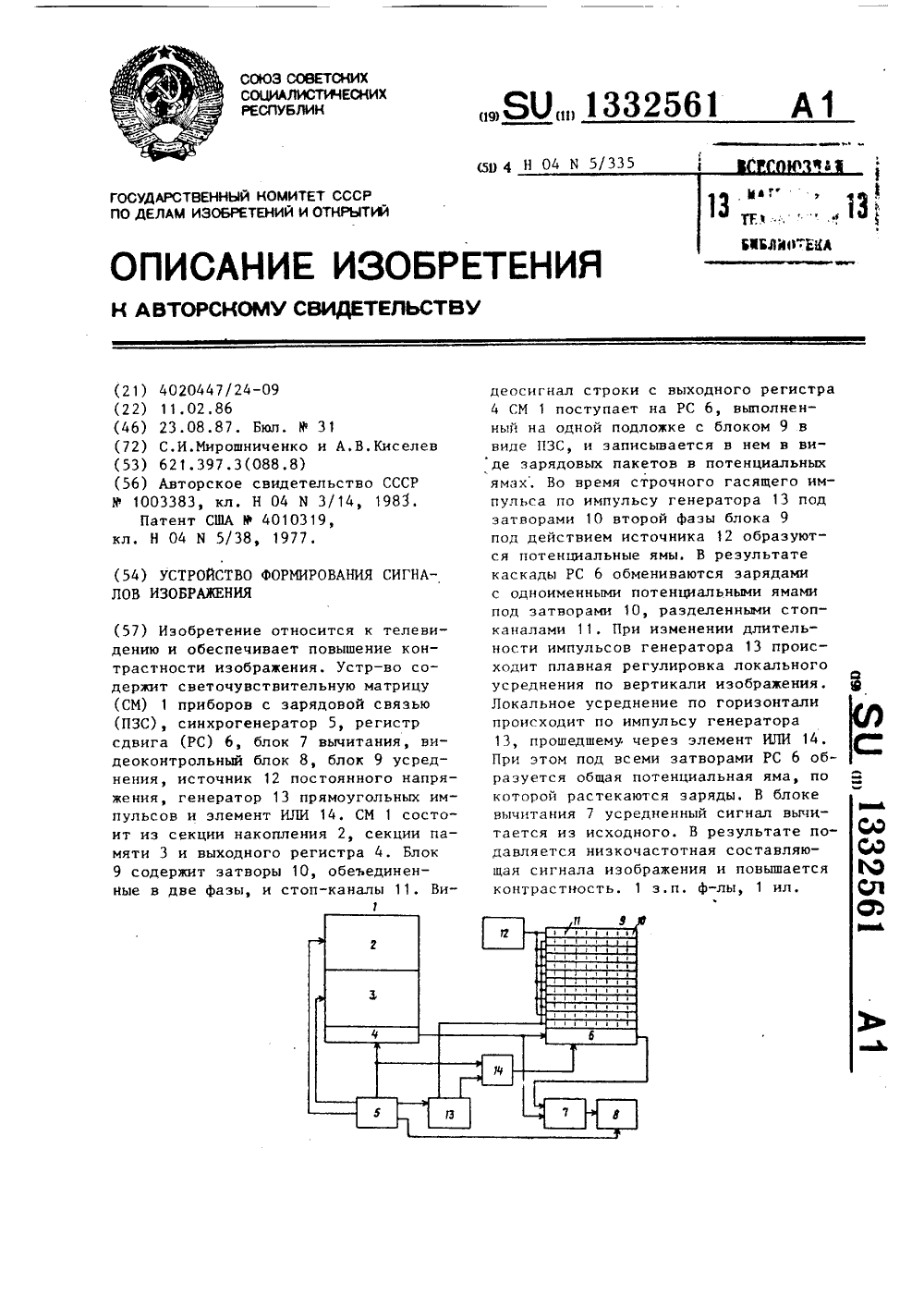
Устройство формирования сигналов изображения
Номер патента: 1332561
Опубликовано: 23.08.1987
Авторы: Киселев, Мирошниченко
МПК: H04N 5/335
Метки: изображения, сигналов, формирования
...в десятки раз больше емкости потенциальной ямы каскада задержки С регистра 6 сдвига. В этом случае при длительном обмене (в течение единиц микросекунд) разница ЛБ " Б, - Пр между Усредненным по вертикали на иэображении значением видеосигнала по предыдущим строкам Цс ри значением записанного в регистр 6 сдвига видеосигнала Ц в Результате обмена уменьшится до величины ЛБ, причем дБр(ь 13+Бс.ср ) СР+13 с.с СуУ +,Это свидетельствует о возможности эффективного локального усреднения сигналов по вертикали путем ненаправленного параллельного обмена зарядами между потенциальными ямами регистра 6 сдвига и блока 9 усреднения.При уменьшении времени обмена, определяемого длительностью импульса с выхода генератора 13, не все потенциальные ямы под...
Устройство установки затухания свч-сигнала

Номер патента: 1730715
Опубликовано: 30.04.1992
Авторы: Балешенко, Смилянец, Фурлендер
МПК: G01R 21/00, H03G 3/30
Метки: затухания, свч-сигнала, установки
...9 памяти и, соответственно, изменение ослабления регулируемого аттенюатора 1. При этом на первом выходе первого блока 10 сравнения устанавливается команда "1", которая поступает на вход счетчика 14 циклов и увеличивает значение выходного кода на единицу. На этом первый цикл заканчивается.Выход счетчика 14 циклов поступает на второй вход блока 17 сравнения, на первыйА вход которого поступает код и = (гдеАэт А - требуемое ослабление) с выхода блока 22 определения числа циклов, который вычисляет целое количество циклов и и дробную часть цикла Л и, т,к. требуемое ослабление А, задаваемое с генератора команд 25, может быть не кратно А э 1.Количество циклов повторяется и подсчитывается счетчиком циклов до тех пор, пока оно не сравняется в...
Чувствительный элемент пьезооптического преобразователя

Номер патента: 636491
Опубликовано: 05.12.1978
Автор: Белицкий
МПК: G01L 1/24
Метки: преобразователя, пьезооптического, чувствительный, элемент
...расположены под углом друг к другу, образуя ломаную линию, расположенную преимущественно в плоскости, перпендикулярной измеряемой силе Р. Эта ломаная линия может образовать треугольник, как это показано на чертеже. Чувствительный элемент жестко связан с силопередающими деталями 8 и 9. Например, в динамо- метре это могут быть две металлические призмы, приклеенные к чувствительному элементу, Чувствительный элемент 1 расположен на пути света в рабочей зоне поляризвционно-оптической системы пьезооптического прибора. Такой системой может слу. жить, например, полярископ, состоящий из последовательно расположенных источника света 10 (преимущественно полупроводникового лазера), модулятора 11, например, в виде управляемой фазосдвигающей...
Способ записи сейсмических сигналов и устройство для его осуществления

Номер патента: 859979
Опубликовано: 30.08.1981
Авторы: Ачкасов, Сорокин, Тимофеев, Турышев
МПК: G01V 1/24
Метки: записи, сейсмических, сигналов
...повысить скорость записисейсмических сигналов на носитель,управлять процессом записи по одномуканалу, то есть упростить схему устройства н, соответственно, повыситьнадежность его работы.Способ записи сейсмических сигналов характеризуется следующей по-следовательностью операций.Разделяют .сейсмический сигнал относительно. нулевых значений на двечасти ноложнтельных и отрицательныхзначений сейсмического сигнала.Заполняют положительную часть сейсмического сигнала высокочастотнымсигналом пилообразной формы, при этомзначения амплитуд пилообразных нмпульсоа равны мгновенным значениямположительной части сейсмическогосигнала,. а частота пилообразных импульсов обратно.пропорциональна этимзначениям.Сумчнруют положительную преобразованную...
Предыдущий патент: Устройство для многоточечной сигнализации
Следующий патент: Преобразователь угол-код
Случайный патент: Установка для утилизации тепловой энергии