Контурная система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 987578
Автор: Цыбулькин
Текст
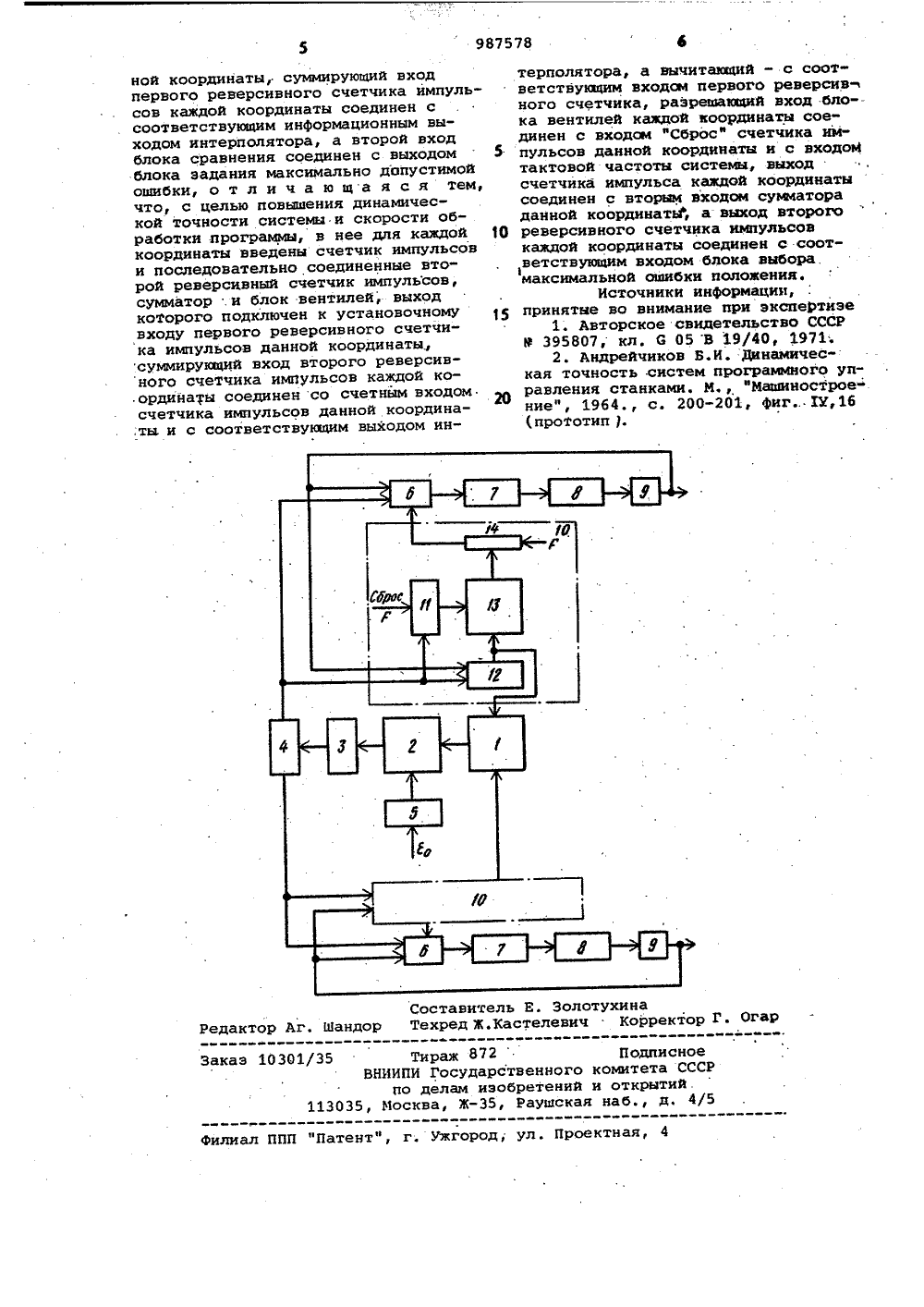
ОПИСАНИЕ 9 уИЗОБРЕТЕНИЯ Союз СаеетскихСоциалистическихРеввубпик КАВТОРСКОМУ СВИДЕТЕЛЬСТВУ(23) Приоритет С 05 В 19/18 Государственный комитет СССР но делам изобретений н открытиИГ.А.Цыбулькинл:Специальное конструкторское бюро электро лойческбгоэффекта Министерства промышленного строительства кр(7 ) Заявитель 54 ) КОНТУРНАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ Изобретение относится к автомати ке и вычислительной технике и может быть использовано в электромеханичес-. ких чертежных автоматах с програм 5 мным управлением.Известно устройство для контурно- го программного управления, содержащее интерполятор, соединенный с блоками сравнения, выходы которых через последовательно соединенные координатные приводы и датчики перемещения подключены к входам соответствующих блоков сравнения. Выходные импульсы датчика перемещения координаты, скорость по которой наибольшая, исполь зуются в качестве тактовых импульсов интеролятора 1).Однако такое устройство характеризуется низким быстродействием.Наиболее близким техническим решением к изобретению является контурная система программного управления, содержащая блок задания максимальной ошибки положения и последовательно соединенные первый усилитель, блок 25 сравнения, второй усилитель, управляющее .устройство, тактирующее устройство и интерполятор, для каждой .;координаты последовательно соединенные цифроаналоговый преобразова тель, второй блок сравнения, устройство управления положением,привод и датчик положения, выход которого подключен к первому входу второго блока сравнения данной координаты, второй вход которого подключен к соответствующему .входу интерполятора, а выход блока задания .максимальной ошибки положения подключен к второму входу блока сравнения 1 2 ).Недостатком известного устройства является невысокая динамическая точность обработки входного воздействия системы.Целью изобретения является повышение динамической точности системы и скорости обработки программы.Поставленная цель достигается тем, что в контурную систему программного управления, содержащую последовательно соединенные блок выбора максимальной ошибки положения, блок сравнения, управляемый генератор и интерполятор, для каждой координаты последовательно соединенные первый реверсивный счетчик импульсов, цифроаналоговый преобразователь, привод и датчик положения, выход которого соединен с вычитающим входом первого реверсивного счетчика им 987578пульсов данной координаты, суммируЮ" щий вход первого реверсивного счетчика импульсов каждой координаты соединен с соответствующим информационным выходом интерполятора, а второй вход блока сравнения соединен с выходом блока задания максимально допустимой ошибки, введены для каждой координаты счетчик импульсов .и последовательно соединенные второй реверсивный счетчик импульсов, сумматор и блок вентилей, выход которого подключен к установочному входу первого реверсивного счетчика импульсов данной координаты, суммирующий вход второго реверсивного счетчика импульсов каждой координаты соединен со счетным входом счетчика импульсов данной координаты и с соответствующим выходом интерполятора, а вычитающий - с соответствующим входом первого реверсивного очетчика, Разрешающий вход блока вентилей каждой координаты соединен с входом "Сброс" счетчика импульсов данной координаты и с входом тактовой. частоты системы, выход счетчика им пульсов каждой координаты соединен с вторым входом сумматора данной координаты, а выход второго реверсивного счетчика импульсов каждой координаты подключен к соответствующему входуЗО блоку выбора максимальной ошибки положения.На чертеже изображена блок-схема предлагаемой контурной системы программного управления. 35Контурная система содержит блок 1 выбора максимальной ошибкиблок 2 сравнения, управляемый генератор 3, интерполятор 4, блок 5 задания максимально допустимой ошибки поло О жения и для каждой координаты первый реверсивный счетчик б импульсов, цифроаналоговый преобразователь 7, привод 8, датчик 9 положения и блок 10 компенсации, который состоит из счетчика 11 импульсов, второго реверсивного счетчика 12 импульсов, сумматора 13 и блока 14. вентилейКонтурная система программного управления работает следующим образом,На входы счетчика 12 импульсов поступают импульсы унитарного кода: на суммирующий вход " из интерполятора 4, а на вычитающий поступают импульсы обратной связи из датчиков 9 положения. Динамические ошибки по обеим координатам би д, образуемые в счетчиках 12 импульсов, поступают в цифровом виде в блок 1 выбора максимальной ошибки положения и большая иэ них по абсолютной величине вычи- бо тается в блоке 2 сравнения из заданной величины ошибки Я, занесенной .в блок 5 задания.максймально допустимой ошибки. Разность между заданной и большей из ошибок по абсолют- Я ной величине У=6 -спика определяют выходную величийу й = К управляемого генератора 3, Здесь 1 - номер координаты, а К - коэффициент пропорциональностиОдновременно динамические ошибки д поступают из счетчиков 12 импульсов в сумматор 13, где образуются суммы динамических ошибок с соответствующими числами импульсов Ь;, поступающих из интерполятора 4 в счетчик 11 импульсов эа период времени Т. Образованные таким образом :суммыЦ= д +а 6; из сумматоров 13 передаются импульсами занесения, поступающими на входы блока 14 с частотой Р, в реверсивный счетчик импульсов б. Стой же частотой Р сбрасываются в ноль счетчики 11 импуль- совПоскольку в реверсивном счетчике б импульсов суммы сигналовЕ;поступают только один раз за продолжительный период Т,то для поддержания непрерывного процесса слежения в интервале времени между моментами их поступления в реверсивные счетчики поступают импульсы из интерполятора 4 и импульсы обратной связи из датчиков 9 положения.Дополнительные сигналы лО; вызывают увеличение числа оборотов двигателей координатных приводов, т,д, увеличение частоты импульсов обратной связи, поступающих с датчиков 9 положения на вычитающие входы счетчиков 12 импульсов. Это приводит к уменьшению величин ошибок Д", образующихся в счетчиках 11 импульсов, Уменьшение же ошибок д; приводит к автоматическому увеличению частоты импульсов, поступающих из управляемого генератора 3 в интерполятор 4, т.е, приводит в конечном итоге к уменьшению динамической ошибки контурной системы.Таким образом, предлагаемое устройство за счет введения блоков компенсации позволяет уменьшить динамическую ошибку контурной системы программного управления, а следовательно, увеличить контурную скорость отработки программы.Формула изобретенияКонтурная система программного управления, содержащая последовательно соединенные блок выбора максимальной ошибки положения, блок сравнения, управляемый генератор и интерполятор, для каждой координаты последовательно соединенные первый реверсивный счетчик импульсов, цифроаналоговый преобразователь, привод и датчик положения, выход которого соединен с вычитающим входом первого реверсивного счетчика импульсов дан987578 Составитель Е. Зола Техред Ж.Кастелевич хина Корректор Г. 0 г едактор Аг. Шанд Тираж Подписное ВНИИПИ Госу комитета СССР по делам и открытий. 3035, Москва, Ж наб., д. 4/5-35, Раушская аказ 10301/35 илиал ППП "Патент", г. Ужгород, ул. Проектная, 4 ной координаты, суммирующий входпервого реверсивного счетчика импульсов каждой координаты соединен ссоответствующим информационным выходом интерполятора, а второй входблока сравнения соединен с выходомблока задания максимально дапустимойошибки, о т л и ч а ю щ а я с я тем,что, с целью повышения динамической точности системы и скорости обработки программы, в нее для каждойкоординаты введены счетчик импульсови последовательно соединенные второй реверсивный счетчик импульсов,сумматор .и блок вентилей, выходкоторого подключен к установочномувходу первого реверсивного счетчика импульсов данной координаты.,суммирукщий вход второго реверсивного счетчика импульсов каждой ко.ординаты соединен со счетнйм входомсчетчика импульсов данной координа,ты и с соответствующим выходом интерполятора, а вычитающий - с соответствующим входом первого реверсив-ного счетчика, разрешающий вход бло ка вентилей каждой координаты соединен с входом "Сбросф счетчика ий пульсов данной координаты и с входомтактовой частоты системы, выходсчетчика импульса каждой координатысоединен с вторым входом сумматораданной координатйф, а выход второго 10 реверсивного счетчика импульсовкаждой координаты соединен с соот,ветствующим входом блока выборамаксимальной ошибки положения.Источники информации, 15 принятые во внимание при экспертизе1. Авторское свидетельство СССРВ 395807, кл, О 05 В 19/40, 1971;2. Андрейчиков Б.И. Динамичес"кая точность систем программного управления станками. М., фМашиностроение", 1964., с. 200-201, фиг ХУ,16прототип .
СмотретьЗаявка
3251779, 25.02.1981
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ЭФФЕКТА МИНИСТЕРСТВА ПРОМЫШЛЕННОГО СТРОИТЕЛЬСТВА УССР
ЦЫБУЛЬКИН ГЕННАДИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: контурная, программного
Опубликовано: 07.01.1983
Код ссылки
<a href="https://patents.su/3-987578-konturnaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Контурная система программного управления</a>
Устройство для коррекции положения резца на станке с программным управлением

Номер патента: 983651
Опубликовано: 23.12.1982
Авторы: Горбенко, Кошкин, Лапандин
МПК: G05B 19/18, G05B 19/4103, G05B 19/418
Метки: коррекции, положения, программным, резца, станке, управлением
...40 начинают поступать на вход аргумента кругового интерпопятора, а именно; на вход записи регистра 9, который 25совместно с сумматором 8 образует накапливающий сумматор оценочной функции, на входы элементов И 27 и 28(формирования координатных приращений)и на счетный вход триггера 25. Круго- зОвая интерполяция осуществляется по следующему алгоритму оценочной функции.При Г (Х;, 2 О, т.е, когда точка находится на илй вне окружности, шаг делается по координате Х и новое значениеоценочной функции вычисляется по фор. муле Р (Х, 2) - 2 Х; + 1,При Г(Х; 2 )СО точка находится внутри окружностй, при этом делается шагпо оси 2, а новое значение оценочнойфункции вычисляется по формулеГ(Х 1, 21) =(Х.у,2)+2 2+.Реализация этого алгоритма...
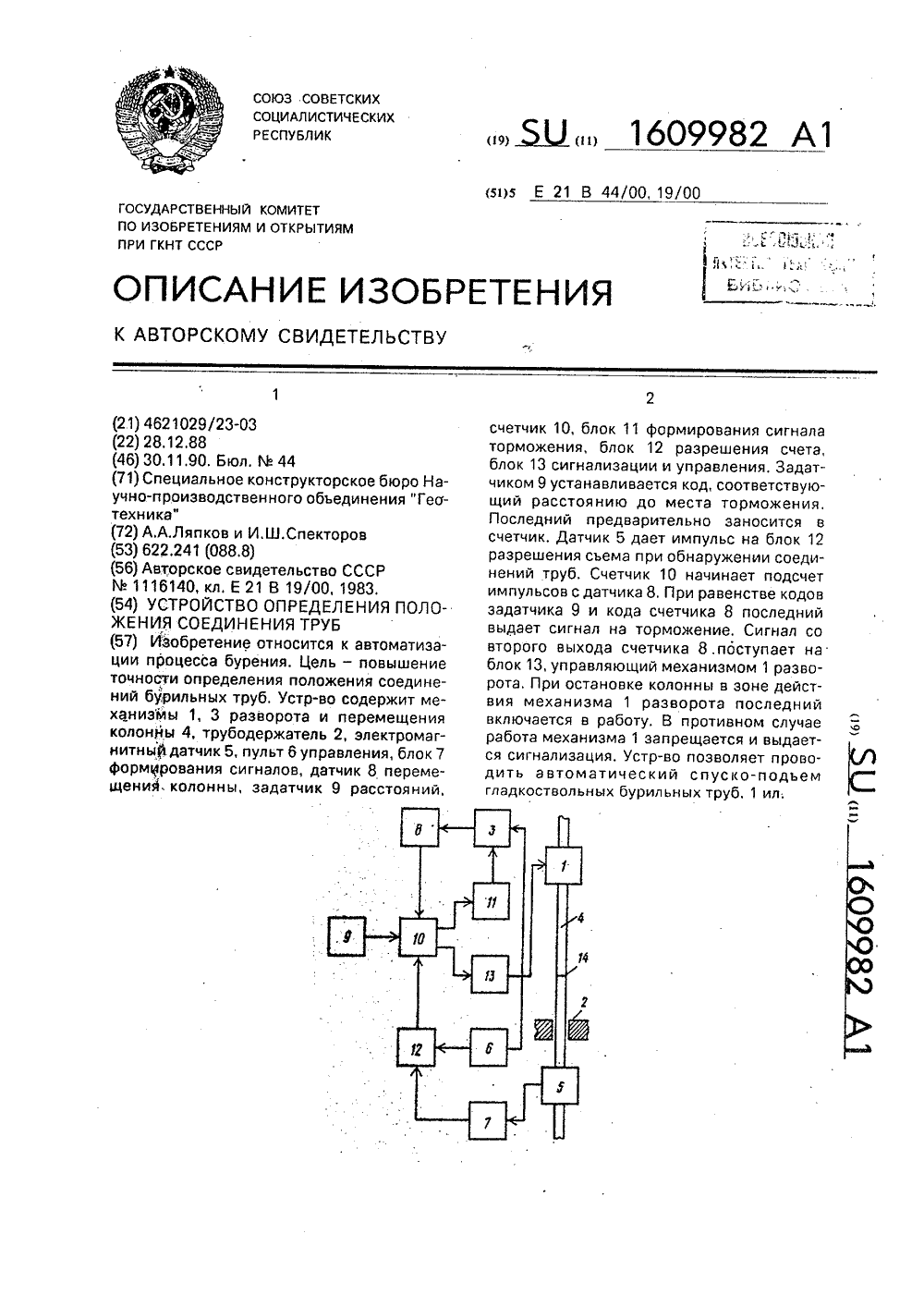
Устройство определения положения соединения труб
Номер патента: 1609982
Опубликовано: 30.11.1990
МПК: E21B 19/00, E21B 44/00
Метки: положения, соединения, труб
...соединен с 35механизмом 3 перемещения колонны, выход которого соединен с входом датчика 8перемещения колонны. Второй выход счетчика 10 соединен с входом блока 13 сигнализации и управления, выход которого 40связан с механизмом 1 разворота колонны.Устройство работает следующим образом.При включении на пульте 1 управлениябуровой установки операции "Подъем" механизм 3 перемещен 1 ля начинает подъем колонньь Одновременно блок 12 разрешениясчета выдает необходимые подготовительные команды счетчику 10, а датчлк 8 перемещения колонны подает импульсы, 50каждый из которых соответствует перемещению колонны на определенныл отрезок,При прохождении через электромагнитныйдатчик 5 резьбового соединения бурильныхтруб сигнал датчика 5 поступает на...
Устройство для умножения частоты следования импульсов

Номер патента: 884102
Опубликовано: 23.11.1981
Авторы: Буценко, Макаренко, Рассказов
МПК: H03K 5/01
Метки: импульсов, следования, умножения, частоты
...10,Блок умножения 6 содержит элементИЛИ 11 и последовательно соединенныепервый счетчик 12 импульсов, запоминающий регистр 13, сумматор 14, элементы переноса 15, второй счетчик 16 импульсов и элемент И 17.Делитель 4 и счетчик 12 являютсясуммирующими двоичными счетчиками,счетчики 9 и 16 - вычитаюшими двоичУстройство работает следующим образом.Импульсы умножаемой частоты поступают на вход синхронизатора 1, При этом, перед каждым входным импульсом со сдвигом на интервал времени 10 С 7 О появляется импульс, совпадающий во времени с одним из импульсов эталонной частоты о, поступающий на вход блока 2.Импульсы от генератора 3 поступаютна вход делителя 4, коэффициент деления которого равен заданному коэффи Оциенту К умножения,Импульсы с выхода...
Устройство для определения координат источников акустической эмиссии в сварных швах

Номер патента: 1045113
Опубликовано: 30.09.1983
Авторы: Германчук, Лебедев, Серединский
МПК: G01N 29/04
Метки: акустической, источников, координат, сварных, швах, эмиссии
...диаграмма, поясняющая возникновение ошибки в определении момента прихода сигнала к преобразователям; на фиг. 3 орин из вариантов расположения электроакустических преобразователей; на Фиг. 1 - временная диаграмма работы устройства. Устройство для определения координат источников акустической эмиссии в сварных швах содержит электра- акустические преобразователи 1-5, соединенные с ними усилители 6-10, нормализатоо 11 импульсов, входы которого соединены с выходами усилителей 6-10, подключенные к выходу ноомализатора 11 имгульсов, блок 12 реверсивных счетчиков, измеритель 13 временных интервалов, блок 11 контроля, пеовый выход каторога падключсн к третьему входу измерителя 13 воеменных интервалов, и блок 15 интенсиметров, пеавьи вход...
Логарифмический время-импульсный преобразователь амплитуды импульса в двоичный код

Номер патента: 661785
Опубликовано: 05.05.1979
Авторы: Благовещенский, Власов
МПК: H03K 13/20
Метки: амплитуды, время-импульсный, двоичный, импульса, код, логарифмический
...блок статистического анализа, предназначенный для исключения влияния на работу цепей обратной связи возможной погрешности однократного преобразования эталонного сигнала, связанной с несинхронностью измеряемого интервала времени Т и импульсов генератора импульсов 11.Блоком управления 8 формируются импульсы запуска преобразователя по каждому из эталонных сигналов. Производится и-кратное поочередное преобразование каждого из эталонных сигналов в одном контрольном участке такта. На входаМ каждого из блоков статистического анализа 13, 14, 15 установлен цифровой порог, равный значению кода, отличающегося на 1/2 от661785 ном участке такта, Преобразование третьего эталонного напряжения и работа треть ей цепи обратной связи, управляющей...
Предыдущий патент: Следящая система
Следующий патент: Устройство для программного управления
Случайный патент: Машина для отливки металлических изделий