Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 924670
Автор: Боровиков
Текст
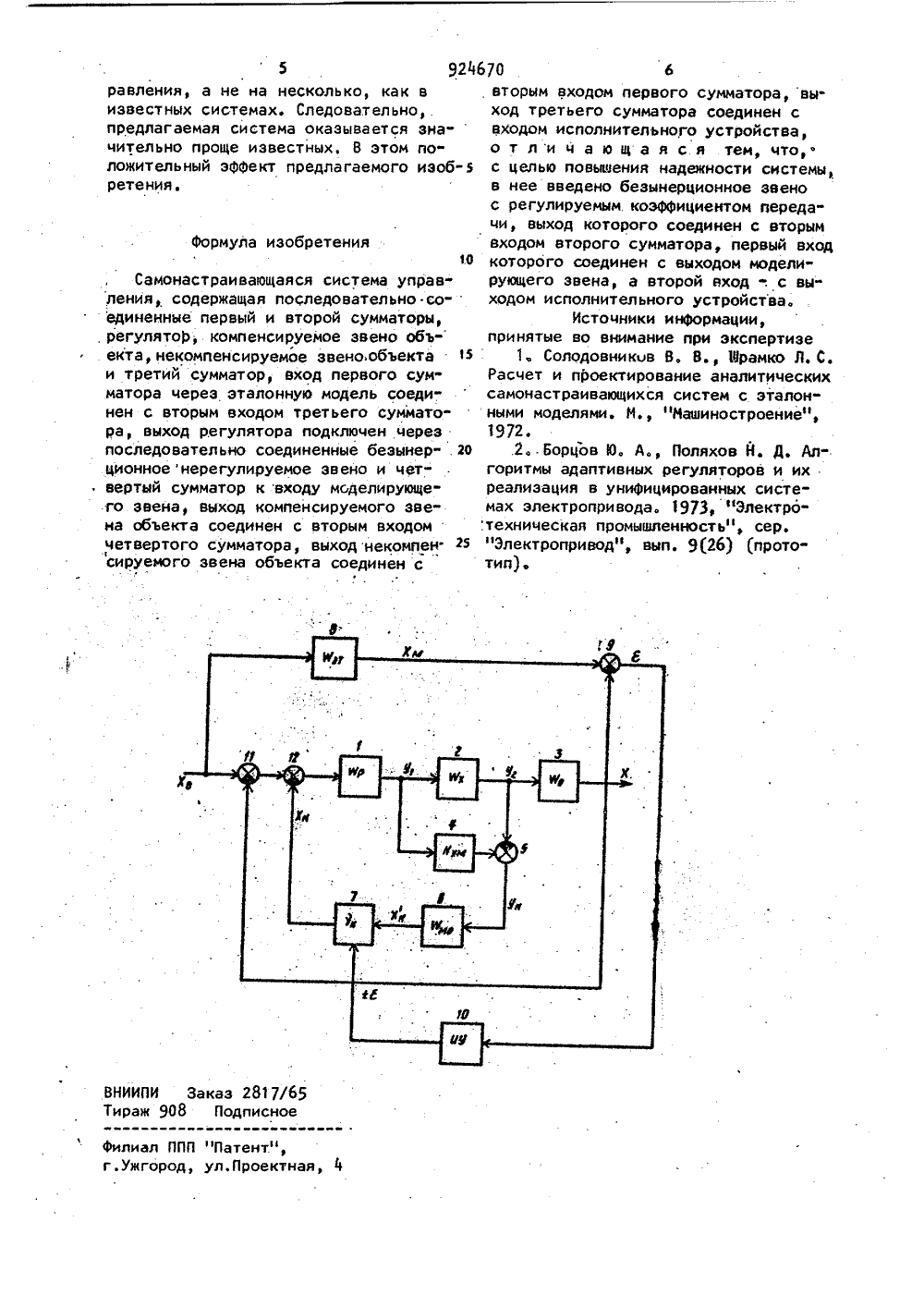
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ . К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Своз СоветскикСоциапксткческинРеспубики 1 ц 924670(6 ) Дополнительное к авт, свнд-ву(22)Заявлено 14.10.81 (21) 2992323/18-24Ф с присоединением заявки РЙ(51)М. Кл. 6 05 В 13/04 Веудврстванвй комнтет СССР ав двлам нзабретеннй и вткрыткя(72) Автор изобретения И. А. Боровиков Ульяновский политехнический инстит т(71) ЗаявительСАМОНАСТРАИВАЮЩАЯСЯ СИСТЕИА УПРАВЛЕНИЯ 3Изобретение оТносится к системам автоматического управления, в частности к классу самонастраивающихся систем с эталонными моделями, и может быть использовано в случаях, когда требуется обеспечить неизменное ф качество переходных процессов при уп" равленйи объектами, постоянные време. ни которых изменяются в широких пределах.Известны самонастраивающиеся си" стемы, содержащие основной. контур и контур самонастройки с эталонной мо" делью и элементом сравнения, на входы которого поданы .эталонный и дей" ствительный процессы, а на выходе выделяется сигнал отклонения действительного процесса от эталонного. Этот сигнал используется для изменения параметров регулятора основного контура с целью обеспечения неизмен"20 них показателей процесса регулирования при изменениях параметров объек" та управления Н 3 Недостатком известных систем является необходимость изменения нескольких параметров регулятора и как следствие - их сложность. Наиболее близкой по своему назна-" чению к предлагаемой является самонастраивающаяся система с эталонной моделью, содержащая последовательно соединенные первый и второй сумматоры, регулятор, комденсируемоезвено объекта, некомпенсируемое звено объекта и третий сумматор, вход первого сумматора через эталонную модель соединен с вторым входом третьего сумматора, выход регулятора подключен через последовательно соединенные безынерционное нерегулируемое звено и четвертый сумматор к входу модулирующего звена, выход компенсируемого звена объекта соединен с вторым вхо" дом четвертого сумматора, выход не- коменсируемого звена объекта соединен с вторым входом первого сумматора,924670 4емым коэффициентом передачи и, темсамым, усиливает или ослабляет корректирующий сигнал Х основного контура в зависимости от величины и знака сигнала Г (й). Так, при увеличениипостоянных времени объекта процессХ(й) идет медленнее эталонного Хай),появляется сигнал отклонения Е(й) 0и коррекцию основного контура необ"ходимо ослабить для чего величинакоэффициента пвредаци Чк должна бытьуменьшена. Наоборот, при уменьшениипостоянных времени объекта ХрЩ идетмедленнее Х(С), появляется сигналотклонения Е(1:)О, коррекцию основного контура необходимо усилить, т.е.увеличить Чк . Поэтому элемент с регулируемым коэффициентом передачидолжен выполняться так, чтобы при80 значение Ч уменьшилось по.сравнению с некотооым 1 , а приГ ( 0 увеличивалось. При этом обеспе"цивается слежение регулируемой величины Х(1) эа эталонным процессом Х (с).Однако как показывает анализ, прификсированных значениях параметровобъекта знак сигнала отклонения (й)зависит от направления изменения зада.ющего или эталонного сигнала, например, при нарастании Х,(1) Е (1) ) О,а при уменьшении Х,1) 1 с) ( О. В тоже время значениедолжно изменяться в одну сторону. Поэтому сигналотклонения Е (й) и необходимо пода"вать на управляющий вход не непосредственноа через дополнительное звено - исполнительное устройство 10,назначение которого изменять знакуправляющего воздействия на безынерционное звено 7 с регулируемым коэфФициентом передачи в зависимости отнаправления изменения задающей илиэталонной величины. Исполнительноеустройство такого. типа оказываетсятакже значительно проще, чем в известных системах. выход третьего сумматора соединенс входом исполнительного устройства 2К недостаткам известной системыотносится ее малая надежность и сложность контура самонастройки. 5Цель изобретения - упрощение контура самонастройки и, тем самым, по"вышение надежности систем, что поэ"воляет расширить область их примене"ния, 10Указанная цель достигается введением в устройство безынерционного зве-,. на с регулируемым коэффициентом передаци, выход которого соединен с вто.рым входом второго сумматора, первый 15вход соединен с выходом моделирующего звена, а второй вход - с выходом. исполнительного устройства.На чертеже показана Функциональная .схема самонастраивающейся системы. 2 ООсновной контур системы состоит изрегулятора 1, компенсируемых звеньев 2 и некомпенсируемых звеньев 3 объекта. Устройство коррекции состоитиэ безынерционного нерегулируемого 25звена 4, четвертого сумматора 5, мо"делирующего звена 6 и беэынерционно"го звена 7 с регулируемым коэффици ентом передачи. Контур самонастройкисостоит из эталонной модели 8, треть" звего .сумматора 9 и .исполнител,ногоустройства 10. Кроме того , основнойконтур содержит первый сумматор 11и второй сумматор 12,Система Функционирует следующиобразом.Эталонная модель 8 выполнена так,что вырабатывает на выходе процессХфй), соответствующий номинальнымзначениям параметров звеньев 2 и 3объекта управления. Поэтому при номинальных значениях динамических параметров объекта ( постоянных времени) на выходе сумматора 9 сигналошибки45 г = х, - х(а)практически равен нулю. При этом контур самонастройки не оказывает никакого влияния на работу основного контура, в частности его устройства коррекции. При отклонении постоянныхвремени объекта от номинальных реальный процесс Х(1) отличается от эталонного Х(1), на выходе суммато" ра 9 появляется сигнал. ошибки(1)0, ы который через исполнительное устройство 10 подается на управляющий вход безынерционного звена 7 с регулиру" Таким образом, за счет введения в устройство безынерционного звена с регулируемым коэффициентом переда" чи, на который воздействует сигнал с выхода сумматора 9 контура самонастройки, можно обеспечивать неизменные показатели процесса регуаирот вания при изменениях в широких преде лах инерционностей (постоянных времени) объекта управления. Причем этот эффект достигается воздействием лишь на один параметр устройства упФормула изобретения ИИПИ Заказ 2817/ раж 908 Подписно филиал ППП "Патент." г,ужгород, ул.Проек 5 9246равления, а не на несколько, как визвестных системах, Следовательно,.предлагаемая система оказывается зна"чительно проще известных. 8 этом по"ложительный эФФект предлагаемого изоб-ретения. Самонастраивающаяся система управления, содержащая последовательно со-единенные первый и второй сумматоры, , регулято, компенсируеиое звено объ" екта, некомненсируеиое звено объекта 5 и третий сумматор, вход первого сум" матора через эталонную модель соеди" нен с вторым входом третьего сумматора, выход регулятора подключен через последовательно соединенные безынер" .2 о ционное нерегулируемое звено и четвертый сумматор к входу моделирующего звена, выход компенсируемого звена объекта соединен с вторыи входом четвертого сумматора, выход некоипен 25 сируеиого звена объекта соединен с 70 6вторым входом первого сумматора, выход третьего сумматора соединен с входои исполнительного устройства, о т л и ч а ю щ а я с.я теи, что, с целью повышения надежности системы, в нее введено безынерционное звено с регулируемцм. коэФФициентои переда" чи, выход которого соединен с вторым входом второго сумматора, первый вход которого соединен с выходом моделирующего звена, а второй вход -. с выходои исполнительного устройства.Источники инФормации принятые во внииание при экспертизе1. Солодовников В. В., Ираико Л. С. Расчет и проектирование аналитических самонастраивающихся систем с эталонными моделями. И., "Машиностроение", 1972..2 Борцов Ю. А., Поляхов Н. Д. Алгоритмы адаптивных регуляторов и их реализация в унифицированных систе" мах электропривода. 1973, "Электро.техническая промышленность", сер.фЭлектроприводфф, вып. Я 26) (прото" тип)е
СмотретьЗаявка
2992323, 14.10.1980
УЛЬЯНОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
БОРОВИКОВ МИХАИЛ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 13/04
Метки: самонастраивающаяся
Опубликовано: 30.04.1982
Код ссылки
<a href="https://patents.su/3-924670-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Система контроля устройства управления электромеханическим объектом

Номер патента: 1693593
Опубликовано: 23.11.1991
Авторы: Дудченко, Овод-Марчук, Смирнов, Филиппович
МПК: G05B 23/02
Метки: объектом, устройства, электромеханическим
...объекта. В устройстве 1 управления определяются действительные значения параметров отработки задающего воздействия, например позиция и скорость, которые используются для регулирования по ошибке между задающим воздействием и его действительным значением.Одновременно на втором выходе распределителя 11 импульсов появляются импульсы учетверенной частоты, которые поступают на еычитающий вход 14 реверсивного счетчика 12,Если на силовом выходе 9 устройства 1управления появляются широтно-модулированные импульсы положительной полярности то импульсы на втором выходе 24 модели 2 опережают по фазе на 90 эл. град. импульсы на его первом выходе 23, При этой импульсы учетверенной частоты появляются на г,ервом выходе распределителя 11 импульсов...
Система телемеханики для рассредоточенных объектов

Номер патента: 563685
Опубликовано: 30.06.1977
Авторы: Абдуллаев, Джавадов, Исмаилов, Исмайлов, Малян, Мустафаев, Назаралиев, Султанов, Чернов
МПК: G08C 19/28
Метки: объектов, рассредоточенных, телемеханики
...приема поступает в блоки приема и передачи кода операции 7 и приема и передачи кода объекта 8. Если блок 8 принял код операции ТС, то код состояния объектов ТС поступает в блок 12 воспроизведения состояния объектов ТС. Если блок 7 принял код операции телеизмерения дебита ТИД, то измерительная информация о дебите скважин подается в блок 13 приема измерительной информации. После проверки по достоверности дан. ная информация выдается в блок 5 обработки и регистрации.По концу передачи измерительной информации о дебите скважин с КП, блок 19 уста 5 10 15 20 25 ЗО 35 40 45 50 60 65 новки режима работы разрешает блоку 24 автоматического исключения скважин перевести пневматический функциональный переключатель 30 в следующую рабочую...
Устройство формирования сигнала управления для релейной защиты объекта

Номер патента: 613418
Опубликовано: 30.06.1978
Автор: Березовский
МПК: H01H 83/00
Метки: защиты, объекта, релейной, сигнала, формирования
...оба блока. На чувствительный элемент ток поступает только от того блока, у которого мгновенное значение,выходного напряжения больше, или кратковременно поступает от обоих блоков, когда мгновенные значения становятся одинаковыми. Если напряжения на входе выпрямителей сдвинуты,по фазе на 90 и, кроме того, имеют одинаковые амплитуды, то оба выпрямителя совместно;могут рассматриваться как четырехфазное выпрямление, В этих условиях ари отсутствии дросселей 7 и 8 происходит существенное увеличение среднего значения выходного,напряжения (при неизменных амплитудах входных напряжений). Если же дроссели 7,и 8 подключены, то они в этих условиях обтекаются токами поочередно, с перерывами и не допускают увеличения среднего значения выходного...
Устройство для полунатурногомоделирования

Номер патента: 822218
Опубликовано: 15.04.1981
Авторы: Кекене, Оржекаускас, Рагульскис, Скучас
МПК: G06G 7/48
Метки: полунатурногомоделирования
...поступает на вход сумматора 5, на второй вход сумматора 5 поступает сигнал с блока 4 моделирования, про.порциональный силе, которую должна 60 передавать моделируемая часть связи на объект 20. Сигнал с выхода сумматора 5 через усилитель 8. мощности поступает на вход возбудителя 9 колебаний и он является суммой упомя нутых сигналов. Так как сигнал, пропорциональный силам сопротивления движению, вызванным конструкцией возбудителя 9 колебаний, используется для преодоления, таких сил в возбудителе 9 коле 6 аний, то вторая часть поступающего на вход возбудителя 9 колебаний сигнала, пропорциональная силе, передаваемой с моделируемой части связи, действительно способствует созданию в возбудителе 9 колебаний такой силы. Из-за...
Система автоматического регулирования энергоблока

Номер патента: 1442677
Опубликовано: 07.12.1988
Автор: Димитриенко
МПК: F01K 3/02
Метки: энергоблока
...давления пара 9 и мощности 1 О, выходы которых соединены с входами соответственно сумматора 5 и регулятора 4 расхода пара, датчик 11 давления газа, связанный с дополнительным сумматором 12, который последовательно соединен с устройством 13 подачи паровоздушного дутья и регулирующими клапанами подачи воздуха 14 или пара 15 в газогенератор, корректирующее звено 16, вход которого связан с выходом сумматора 12, а выход соединен с входом регулятора 7 расхода газа, при этом выход сумматора 12 связан с входом устройства 13 подачи паровоздушного дутья. Система работает следующим образом.При уменьшении мощности, вызванном внешним возмущением, сигнал рассогласования между выходным сигналом датчика 10мощности и заданием с выхода регулятора 4...
Предыдущий патент: Автомат-настройщик для систем управления
Следующий патент: Система управления телескопом
Случайный патент: Прибор для определения времени освещенности (инсоляции) территории, зданий и помещений