Устройство для транспортирования штучных грузов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
О П И С А Н И Е 11878688ИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(б 11 Дополнительное к авт 1) Ч.Кл." В 65 С 47/22 2) Заявлено 17.07,79 (21) 2836487/27 с присоединением заявке сударственный коми. Сев Заявител ИРОВАНИЯ АНСПО РУЗОВ(54) УСТРОЙСТВО ДЛЯШТУЧНЫХ н- е Изобретение относится к оол асти подъемно-транспортного машиностроения, а именно к устройствам для транспортирования штучных грузов, которые подвергаются технологической обработке.5Известно устройство для транспортирования штучных грузов, содержащее конвейер, снабженный механизмами, позволяющими рассредотачивать грузы для передачи их на пункт обработки 11. На 10 пункте имеются приспособления, которые совершают возвратнопоступательное перемещение, удаляя при этом грузы с конвейера для их обработки и возвращая грузы вновь на конвейер для дальнейшей 15 транспортировки.Недостаток этого устройства заключается в том, что оно имеет ограниченные технологические возможности, так как обеспечивает обработку изделия только 2 О после того, как оно снято с конвейера. Кроме того, устройство громоздко и ко структивно сложно, занимает больши производственные площади.Известно также устройство для транс порти рова ни я штучных грузов, содержащее последовательно расположенные подающий, промежуточный и выдачной конвейеры с параллельно расположенными лентами, огибающими установленные на З 0 осях ведущие и ведомые шк е механизм для вращения груз Р жуточном конвейере 2.Недостатком такого устройства является то, что механизм для вращения грузов имеет конструктивно сложное выполнение.Целью изобретения является упрощение конструкции устройства.Для этого механизм для вращения грузов выполнен в виде, пары роликов, установленных на оси ведущего и ведомого шкивов промежуточного конвейера и соединенных кинематически с осью посредством пружин, имеющих противоположные навивки, а один из роликов выполнен за одно целое с ведущим шкивом промежуточного конвейера, при этом ролики имеют привод, выполненный в виде горизонтально расположенного приводного диска, контактирующего с ним,На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А - А на фиг. 1.Устройство для транспортирования штучных грузов состоит из последовательно расположенных подающего, промежуточного и выдачного конвейеров, Подающий .конвейер состоит из,пары лент 1 и 2, огибающих ведущий шкив 3 и ведомые шкивы 4 и 5, жестко закрепленные на оси5 0 15 20 25 30 З 5 40 45 50 55 60 6, а также свободно закрепленный на оси 7 шкив 8. Промежуточный конвейер содержит фрикционный привод, состоящий из электродвигателя 9, шкива 10, ролика 11, ролика 12, выполненный за одно целое с ведущим шкивом 13, а также жестко закрепленный на оси 7 ведомый шкив 14. Шкивы 13 и 14 огибаются лентами 15 и 16. Ролики 11 и 12 кинематическн связаны с осью 7 пружиной 17, которая имеет левую павивку, и пружиной 18, которая имеет правую навивку, а шкив 3 - со шкивом 13 пружиной 19 с левой навивкой.111 кив 20 жестко связан с осью 21, а шкив 22 свободно на нее посажен, Выдачной конвейер состоит из двух бесконечных лент 23 и 24, огибающих шкивы 25 и 26, жестко связанные с осью 21, и шкивы 27 и 28, свободно посаженные на ось 29. Все оси шкивов конвейеров свободно закреплены в опорах 30 и 31 Транспортируемые н обрабатываемые пластины 32, 33, 34 расположены на лентах 1, 2, 15, 16, 23, 24.Работает устройство еле ующнм образом.Изделия, например полупроводниковые пластины, из кассеты (не показана) поступают на ветви лент 1 и 2 подающего конвейера. В это время электродвигатель 9 включен, и шкив 10 вращается по часовой стрелке (фиг. 1). Ролик 11 вранается против часовой стрелки (вид по стрелке Б па фиг. 2) и против направления навивки пружины 17, т. е. он вращается вхолостую на оси 7, Ролик 12 со шкивом 3 вращается по часовой стрелке и по направлению навивки пружины 18, вследствие этого происходит кинематическое замыкание ролика 12 и шкива 13 с осью 7, вследствие чего она начинает вращаться вместе со шкивом 14. Шкив 13, вращаясь по направлению на. нивки пружины 19, кинсматически замыкается со шкивом 3, который также вращается по часовой стрелке. Ведущие шкивы 13 и 3 посредством связи с лентами 2 и 16 приводят в движение по часовой стрелке все остальные шкивы, вследствие чего все остальные шкивы также движутся слева направо (фиг. 1), перемещая в том же направлении помещенные на них пластины 32, 33 и 34. При достижении пластиной 32 позиции контроля (например, замер поверхностного удельного сопротивления пластины), а пластиной 33 позиции, где происходит замер толщины пластины в нескольких точках методом скандирования, под бесконтактным датчиком происходит реверс электродвигателя 9, вследстне чего шкив 1 0 вращается против часовой стрелки. Ролик 11, вращаясь в данном случае по часовой стрелке и по направлению навив ки пружины 17, кинематически замыкается с осью 7, вращает ее по часовой стрелке вместе со шкивом 14, который через ленту 15 вращает жестко связанные с осью 21 шкивы 20, 25 и 26, а те, в свою очередь, вращают слева направо ленты 23 и 24, Ролик 12 вместе со шкивом 13 вращается вхолостую на оси 7, так как они вращаются против направления навивок пружин 18 и 19. По этой же причине в состоянии покоя находится.и ведущий шкив,3.Таким образом, при реверсе ветви лент 1 и 2 находятся в состоянии покоя. Пластина 32 неподвижна. Ленты 15 и 16 движутся одна навстречу другой, пластина 33 вращается вокруг своей оси. Ленты 23 и 24 движутся в одном направлении слева направо. Пластина 34 удаляется с транспортера и загружается в соответствующую кассету, затем цикл повторяется вновь, т, е. на ветви лент 1 и 2 поступает новая пластина из кассеты, пластина 32 поступает на ветви лент 15 и 16, а пластина 33 - на ленты 23 и 24,Устройство конструктивно просто и позволяет одновременно выполнять несколько технологических операций и автоматизировать процесс, например, сортировки пластин по различным физико-электрическим параметрам,Формула изобретения Источник информации,внимание при экспертизе:1. Патент США3236374, кл. 209-75, опублик. 19772, Авторское свидетельство327105, кл. В 65 6 47/52, 1968 (прототип),принятый во Устройство для транспортирования штучных грузов, содержащее последовательно установленные подающий, промежуточный и выдачной конвейеры с параллельно расположенными лентами, огибающими установленные на осях ведущие и ведомые шкивы, и механизм для вращения грузов на промежуточном конвейере, о тличающееся тем, что, с целью упрощения конструкции устройства, механизм для ,вращения грузов выполнен в виде пары роликов, установленных на оси ведущего и ведомого шкивов промежуточного конвейера и соединенных кинематически с осью посредством пружин, имеющих противоположные навивки, а один из роликов выполнен за одно целое с ведущим шкивом промежуточного конвейера, при этом ролики имеют привод, выполненный в виде горизонтально расположенного приводного диска, контактирующего с ними.878688 йю Р ромова акто авлова рректор И. Осниовс ва аказ 1468/1107НПО Поиск Г Составитель Ю хред А, Камы Изд.578 Тираж 842ударственного комитета СССР по делам изоб 113035, Москва, Ж, Раушская наб., д. 4/5 Тнп. Харьк. фил. пред. Патент Подписноеи открытий
СмотретьЗаявка
2836487, 17.07.1979
ПРЕДПРИЯТИЕ ПЯ Р-6707
СЕВЕРИНОВ ВЛАДИМИР ФЕДОРОВИЧ, ПЛОТНИКОВ АЛЕКСАНДР ПЕТРОВИЧ, КОСТЫЛЕВ ВЛАДИМИР ИВАНОВИЧ
МПК / Метки
МПК: B65G 47/22
Метки: грузов, транспортирования, штучных
Опубликовано: 07.11.1981
Код ссылки
<a href="https://patents.su/3-878688-ustrojjstvo-dlya-transportirovaniya-shtuchnykh-gruzov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для транспортирования штучных грузов</a>
Переводная стрелка подвесного конвейера

Номер патента: 1052449
Опубликовано: 07.11.1983
МПК: B65G 17/30
Метки: конвейера, переводная, подвесного, стрелка
...пути, связанные между собой поворотными участками пути, ходовой и отводной пути снабжены жестко закрепленным кронштейномс пружиной, а каждый поворотный участокпути - Г-образным упором со скобой, приэтом кронштейн связан с упором пружиной, 25а скоба упора установлена с возможностьювзаимодействия с кронштейном,На фиг. 1 показана часть конвейера сходовым и отводным путями; на фиг. 2 -то же, вид сверху; на фиг. 3 - разрез А-Ана фиг. 2; на фиг. 4 - вид Б на фиг. 2;30на фиг. 5 - разрез В-В на фиг, 3; нафиг. 6 вид Г-Г на фиг. 4.Переводная стрелка подвесного конВейера содержит поворотный участок пути1, шарнирно связанный с отводным участ 2ком пути,2 конвейера, прямолинейный участок пути 3, шарнирно связанный с основным ходовым путем 4....
Полочный отстойник

Номер патента: 1782939
Опубликовано: 23.12.1992
Авторы: Кудрявцев, Кузнецов, Плитман, Рабинович
МПК: C02F 1/52
...они сжимаются. уменьшаясь в объеме.10 15203035 При спущенных уплотнениях каждый блок 9, имеющий в плоскости, перпендикулярной оси вращения форму квадрата, может быть свободно повернут на 900, При этом продольный наклон пластин в блоке заменяется на поперечный или наоборот - . поперечный на продольный. За счет квадратного сечения в плане любой блок при повороте на 90 вокруг оси, перпендикулярной продольной оси корпусе отстойника, фиксируется относительно корпуса отстойника 1 в прежнем (до поворота) положении, но с измененным типом наклона пластин по отношению к направлению движения жидкости в отстойнике. После поворота всех нужных блоков открывается вентиль на газопроводе, подающем сжатый газ к надувным уплотнительным перегородкам...
Регулируемый шкив клиноременного вариатора

Номер патента: 1368555
Опубликовано: 23.01.1988
МПК: F16H 55/56
Метки: вариатора, клиноременного, регулируемый, шкив
...из которых закреплена одним концом на ступице У, а другим - на дополнительном рычаге, который установлен с угносительно грузов 9, При вращениишкива грузы 9 и 11 поворачиваются наосях 8 до, соприкосновения друг с другом, после чего меняется характеристика центробежного устройства, т.к.дополнительные грузы 11 начина:ют препятствоватьповороту грузов 9. 2 ил,ловым смещением относительно двуплечего рычага. Центробежные грузы закрыты кожухом 14, который являетсятакже ограничителем поворота груза11 под действием пружин 13,Регулируемый шкив клиноременного вариатора работает следующим образом.1 В неподвижном состоянии и при вращении во время работы двигателя на холостом ходу конические диски 3 и 4 раздвинуты пружиной 5, а угловое смещение...
Регулируемый шкив клиноременного вариатора
Номер патента: 1618969
Опубликовано: 07.01.1991
Авторы: Баловнев, Лукьянов, Мартыхин, Петров
МПК: F16H 55/56
Метки: вариатора, клиноременного, регулируемый, шкив
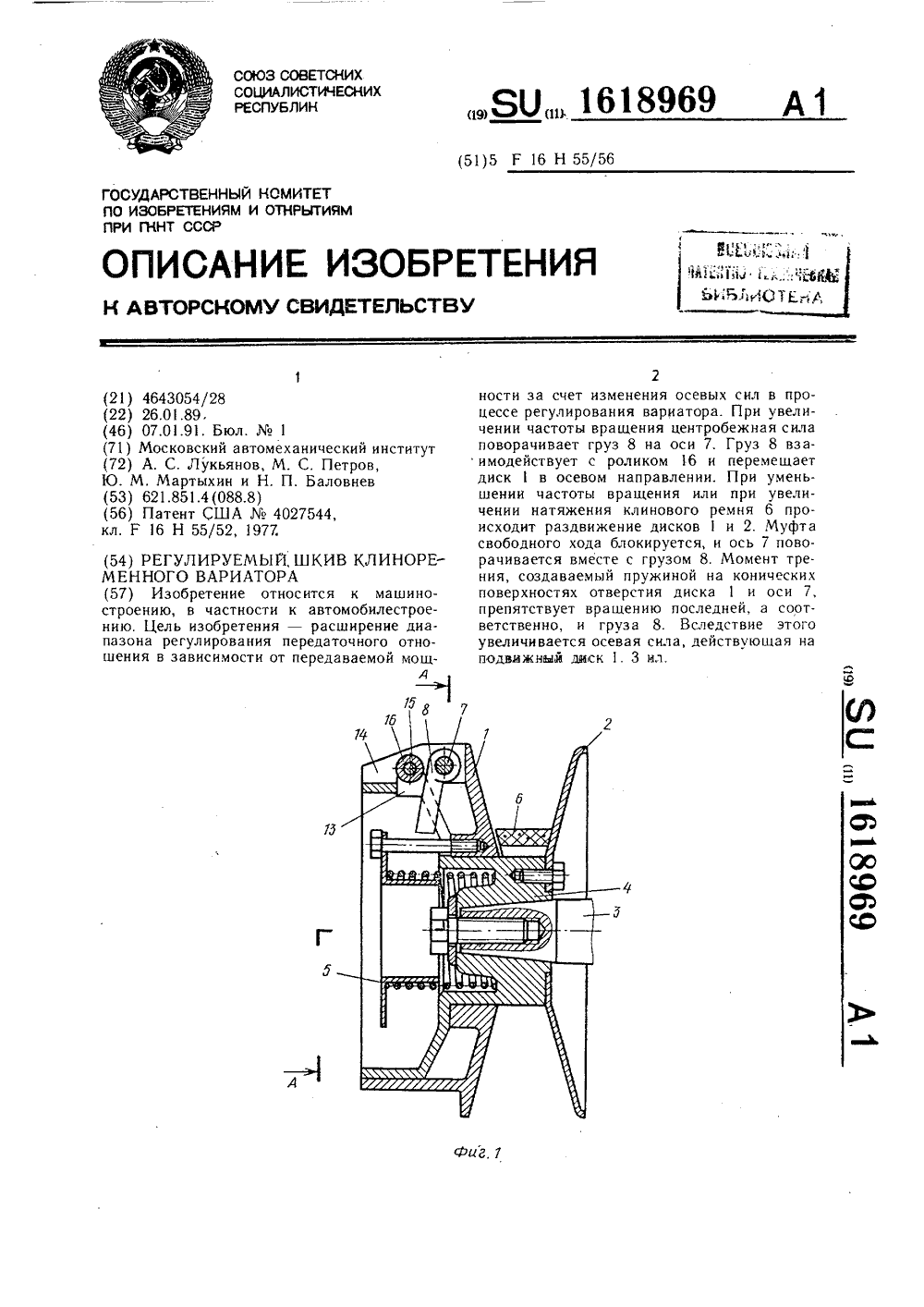
...характеризуется отрезком ОБ (фиг. 3). При увеличении частоты вращения центробежная сила поворачивается груз 8 на оси 7 по часовой стрелке. Передача вращающего момента с неподвижного диска 2 на диск 1 осуществляется с помощью выполненных на ступице 4 приливов 13, установленных в прорези 14 диска 1. Груз 8 взаимодействует с роликом 16 и перемещает диск 1 в осевом направлении, в результате чего происходит выход ремня на минимальный расчетный диаметр ведущего шкива, его поперечное сжатие и работа ведущего шкива в режиме муфты сцепления при буксовании ремня (отрезок БВ, фиг, 3). При дальнейшем увеличении частоты вращения происходит работа ведущего шкива в режиме клиноременной передачи при максимальном передаточном отношении Макс...
Приводной шкив устройства для подачи нити

Номер патента: 725991
Опубликовано: 05.04.1980
Авторы: Ваксенгисер, Герценштейн, Зайцев, Присяжнюк
МПК: B65H 51/04
Метки: нити, подачи, приводной, устройства, шкив
...поверхности секторов образуют круг меньшего чем ранее диаметра. Величинадиаметра шкива видна на шкале крышки7 по указателю 8. Установив, такимобразом,нужный диаметр, секторафиксируют гайкой 6, Для увеличениядиаметра шкива устройства необходимо при отпущенной гайке 6 вращатьдиск 1 против часовой стрелки,при 4 Оэтом гибкие звенья 5 сматываясь со ступицы 2, перемещают ползушки с секторами радиально от центра, затем сектора фиксируются гайкой 6 и устройство подготовлено к работе.Испытания приводного шкива проведены на круглотрикотажной машине модели КТЧерновицкого производственного объединения легкого машиностроения и показали надежную работу, сравнительную простоту в изготовлении и универсальность, т.е, использование шкива как дляподачи...
Предыдущий патент: Виброторцеватель
Следующий патент: Устройство для навески изделий на подвесной конвейер
Случайный патент: Газовая линза