Устройство для управления приводом периодических подач станка
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 767707
Авторы: Ковалевская, Орлова, Сабирзянов, Тув, Шендрик



Текст
й ИС АНИ Е Союз Соеетскик Социалистических Республик(23) Приоритет 6 05 В 19/40 Государственный комитет СССР по дедам нзобретЕний и открытий(54) УСТРОЙСТВО ДЛЯ ПРАВЛЕНИЯ ПРИВОДОМ ПЕРИОДИЧЕСКИХ ПОДАЧ СТАНКАИзобретение относится к области автоматического программного управления положением производственных механизмов и может быть применено для 5 управления суппортами продольнострогальных станков.Известно устройство управления приводом периодических подач продольно-строгальных станков, в том числе 10 устройство, содержащее тиристорный преобразоваТель, двигатель постоянного тока,. тахогенератор, датчики положения, формирователь, счетчик импульсов, преобразователь кода и задатчик 15 перемещения 11 .Однако зто устройство не обеспечивает высокой точности отработки подачи из-за большой дискреты циклически абсолютного датчика - 0,025 мм на 20 первой студени, 2,5 мм - на второй ступени, и высокой стабильности отработки иэ-за отсутствия ступенчатого торможения,при подходе суппорта в заданной точке. Кроме того, устройство 25 не обеспечивает индикацию положения суппорта относительно начала отсчета,Наиболее близким техническим реше.нием к данному изобретению является устройство для управления приводом периодических подач станка, сбдержащее преобразователь сигналов датчиков,положения, эадатчик перемещения, эадатчик начала отсчета, выходы которыхпоступают на коммутатор, арифметический блок, вход которого соединен с выходом коммутатора, а выход - с входом формирователя управляющих воздействий блок цифровой индикации,соединенный через коммутатор с входом ивыходом арйфметического блока, блокконтроля и блок синхронизации 21 .Однако,оно не обеспечивает режимациклической подачи, который являетсяосновным режимом работы строгальногосуппорта и заключается в многократных,равномерных перемещениях суппорта завремя обратных ходов стола,Целью изобретения является расширение Функциональных возможностей путем обеспечения автоматического переезда в режиме циклической подачи.Эта цель достигается тем, что вустройство для управления приводомпериодических подач станка, содержащее задатчик начала ьтсчета.и последовательно соединенные преобразовательрой коммутатор, блок контроля и блок цифровой индикации, второй вход ко торого соединен со вторым выходом второго коммутатора, подключенного - вторый- входом к выходу первого коммутатора а третьим входом к первому выходу блока синхронизации, второй "выход"которого соединен,со вторымвходом первого коммутатора, третий выход - с третьим входом блока цифровой индикации, а четвертый выход через формирователь управляющих воз,действий подключен ко входу третьего кбммутатора, йричем выход арифметического блока соединен со вторым вхо 5 10дом Формирователя.управляющих воздействий, а третий вход первого комму -"татора -" с выходом эадатчика перемещения, введены последовательно соединенные четвертый коммутатор, регистр и пятый коммутатор, второй вход"которого подключен к выходу задатчика начала отсчета, выход - к четвертому входу первого коммутатора, атретий вход - к первому выходу блокасинхронизации й к первому входу четвертого коммутатора, второй вход которого подключен к выходу арифметического блока.На чертеже показана функциональ-,ная схема предлагаемого устройства.Оно содержит Преобразователь 1сигналов датчиков положения, эадат- ЗО чик 2 перемещений, задатчик 3 начала огсчета, первый коммутатор 4, арифметический блок 5, формирователь б управляющих воздействий, блок 7 цифровой индикации, блок 8 синхронизации,З 5 второй коммутатор 9, блок 10 контроля, регистр 11 четвертый коммутатор12, пятый коммутатор 13 и третий коммутатор 14.Сигналы с преобразователя 1 и эа Одатчика 2 поступают на блок 5 последовательно во времени с коммутатора4, управляемого блоком 8. Блок 5 вы числяет рассогласование Р по алгоритму Р = Д-Н+П,где Д вкод датчика положения;Н- код начала отсчета;П - код заданногоперемещения,По"сигйалусо станка- код"даганаположения с выхода блока 5 через коммутатор 12 записывается в регистр 11и поступает через коммутаторы 13 и 4на вход блока 5. По вычислейнойу этимблоком рассогласованию формирователь6 осуществляет управление коммутатором 14,. напряжение с которого поступает на привод по сигналу со станка.Помере отработки приводом заданнойподачи в формирователе возникают сигкалы, обеспечивающие торможение привода.;После отработки первого циклаподачи командой со станка код следую"1 аего-датчика положения записываетсяв регистр 11 и подается на вход блока 5, раосогласование на выходе котброго, равное заданной подаче, с приходом команды со станка используется для Отработки подачи во втором цикле. Код датчика положения отработанного цикла подачи записывается в регистр 11 и используется для смещения начала отсчета в следующем цикле, обес-. печивая автоматический переезд в режиме циклической отработки заданной подачи. В режиме "позиционирование" смещение начала отсчета набирается на задатчике 3 начала отсчета и подается через коммутаторы 13 и 4 на блок 5.Устройство обеспечивает с помощью блоков 7, 9 и 10 индикацию на электроннолучевой трубке положения суппорта относительно абсолютного начала отсчета, действительного значения величины перемещения, рассогласования и т,д.Формула изобретенияУстройство для управления приводбм периодических подач станка, содержащее эадатчик начала отсчета ипоследовательно соединенные преобразователь сигналов датчиков положения,первый коммутатор, арифметическийблок, второй коммутатор, блок контроля и блок цифровой индикации, второйвход которого соединен со вторым выходом второго коммутатора, подключенного вторым входом к выходу первогокоммутатора, а третьим входом к первому выходу блока синхронизации, второй выход которого соединен со вторымвходом первого коммутатора, третийвыход - с третьим входом блока цифровой индикации, а четвертый выход черезформирователь управляющих воздействийподключен ко входу третьего коммутатора, причем выход арифметическогоблока соединен со вторым входом формирователя управляющих воздействий, атретий вход первого коммутатора - свыходом задатчика перемещения, о тл и ч а ю щ е е с я тем, что, сцельюрасширения Функциональных возможностей устройства, в него введеныпоследовательно соединенные четвертый коммутатор, регистр и пятый коммутатор, второй вход которого подключен к выходу эадатчика начала отсчета, выход -к четвертому входу первого коммутатора, а третий вход - к первому выходу блока синхронизации и кпервому входу четвертого коммутатора,второй вход которого подключен к выходу арифметического блокаисточники информации,принятые во внимание при экспертизе1. Сандлер А.С. Электропривод иавтоматизация металлорежущих станков.М., фВысшая школа", 1972, с. 235.2. Авторское свидетельство СССР9 3924 б 1, кл. 6 05 В 19/18, 1970767707 елинкова оставительехред Н.Гра тор :НГригор з 7193/43 Проектная, 4 едактор Т. Горяче Тираж 956 ВНИИПИ ГосУдарственного комит по делам изобретений и откр 13035, Москва, Ж, Раушская на
СмотретьЗаявка
2587524, 02.03.1978
ПРЕДПРИЯТИЕ ПЯ В-8852
КОВАЛЕВСКАЯ ЛАРИСА ИВАНОВНА, ОРЛОВА НИНЕЛЬ МИХАЙЛОВНА, САБИРЗЯНОВ СУЛЖАН МИНГАЛЕЕВИЧ, ТУВ АЛЕКСАНДР МЕЕРОВИЧ, ШЕНДРИК НИКОЛАЙ ЕВТИХИЕВИЧ
МПК / Метки
МПК: G05B 19/40
Метки: периодических, подач, приводом, станка
Опубликовано: 30.09.1980
Код ссылки
<a href="https://patents.su/3-767707-ustrojjstvo-dlya-upravleniya-privodom-periodicheskikh-podach-stanka.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления приводом периодических подач станка</a>
Способ определения температуры движущейся полосы металла при термообработке в печах струйного нагрева

Номер патента: 1529051
Опубликовано: 15.12.1989
Авторы: Беридзе, Бондарь, Кришман, Табидзе, Турманидзе
МПК: G01J 5/50
Метки: движущейся, металла, нагрева, печах, полосы, струйного, температуры, термообработке
...в печь)до точки визирования д-го 25пирометра;Ч - скорость транспортированияполосы, вычисляются промежутки времени транспортирования фиксируемогоучастка полосы от момента входа впечь до точек визирования первого,второго и третьего пирометров. Послеэтого для начала отсчета времени запускается входящий в состав УВМ 8таймер. В моменты прохождения фиксируемого участка полосы через точкивизирования пирометров, которые определяются с помощью таймера, по сигналу от УВМ пирометрами 2-4 измеряются условные темпуратуры Т Ту Туу 40Далее после передачи этой информации в цифровом виде в УВМ 8 путемрешения нелинейного уравнения-е "1 "т1 Оопределяется коэффициент кривой нагрева полосы 1 у.По значениюв УВМ 8 по формулеТ еф" 1-е"т)-Тк 1" 1-еТ ТФСо к Т...
Устройство для отображения вычислительного процесса
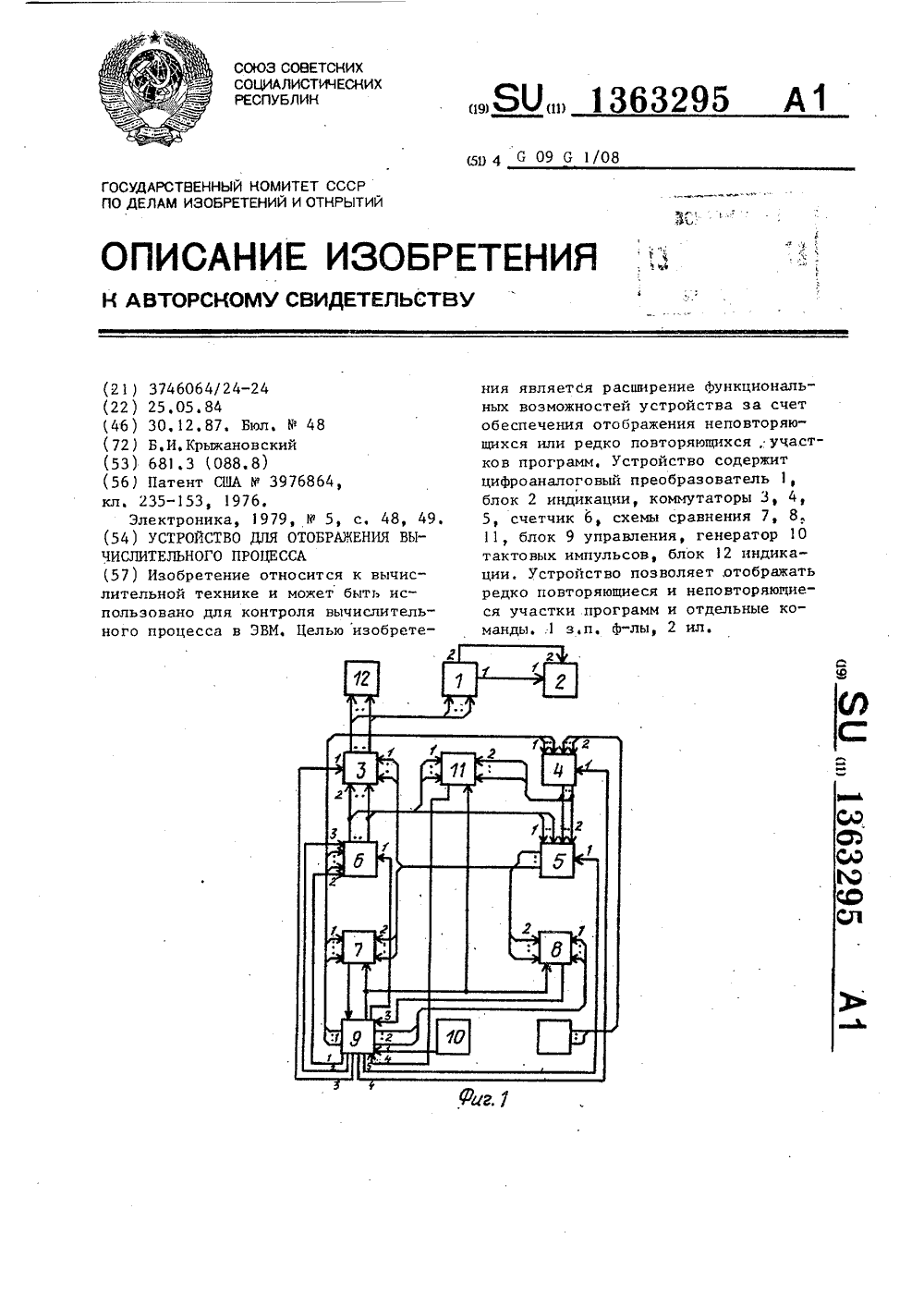
Номер патента: 1363295
Опубликовано: 30.12.1987
Автор: Крыжановский
МПК: G09G 1/08
Метки: вычислительного, отображения, процесса
...исходное состояние. При этом открываетсяэлемент И 22 и синхроимпульсы черезпервый выход блока 9 проходят навторой вход счетчика 6 и на соответствующие входы триггеров 24 и 23,45.Нажатием второго переключателя 19 осуществляется пуск устройства. Приэтом синхроимпульсы через шестойвыход блока 9 поступают на первыевходы первой 7, второй 8 и третьей 11 схем сравнения. При реализации анализируемого участка программы на группе входов устройства последовательно во времени будут сформированы коды адреса, соответствующие началу и концу этого участка, Код адреса начала анализи-, руемого участка программы через вторую группу входов коммутатора 4, через его группу выходов, через вто45 Фор мула 5 1363 рую группу входов коммутатора 5, через его группу...
Аналоговое запоминающее устройство

Номер патента: 244717
Опубликовано: 01.01.1969
Авторы: Нисневич, Порудоминска
МПК: G11C 11/08, G11C 27/00
Метки: аналоговое, запоминающее
...ток,За начало отсчета принимается момент времени, в который поле, совдаваемое входным сигналом, достигает значения поля трогания,Отставание напряжения на выходе детектора от напряжения на его входе для каждого данного, момента времени характеризуется величиной ЛУотст причем величина эта тем больше, чем больше крутизна огибающей входных импульсов.Если в какой-то момент времени перестройка трансфлюксора прекратится и на вход,детектора станет поступать последовательность импульсов с одинаковой амплитудой, напряжение на выходе детектора не останется неизменным и равным напряжению настройки, а будет расти, пока не достигнет установившегося значения:1 вых, уст - Кд 1 и где К - коэффициент детектирования,Уи - амплитуда импульсов на входе...
432549

Номер патента: 432549
Опубликовано: 15.06.1974
Автор: Чубарь
МПК: G06K 7/14
Метки: 432549
...напряжений 6 единен с ключом 3; регистр 4 соединен с ходами счетчика опорных импульсов 1, схе задержки 2 и ключа 3.Предназначенное для ввода фотоизображение размещается на транспортной ленте передатчика фототелеграфного аппарата 7 и с помощью протяжного механизма передатчика подводится к линии оптического луча, осуществляющего построчный анализ фотоизображения. Выходное напряжение электронного блока передатчика фототелеграфного аппарата 7, пропорциональное оптической плотности фотоизображения, детектируется детектором выходных напряжений б. Амплитуда продетектированного выходного напряжения с белого ноля фотоизображения является разрешающим уровнем электронного ключа 8, а с черного поля - запрещающим, Из напряжения опорного...
340076

Номер патента: 340076
Опубликовано: 01.01.1972
МПК: H03M 1/50
Метки: 340076
...начала и конца измерения подают на счетный вход триггера, который управляет прохождением импульсов стабильной частоты с генератора через схему 1,Импульсом начала измерения триггер уста,:авлнвастся з рабочее положенне, пр: этом запускается одновибратор и разрешается прохождение импульсов стабильной частоты через схему 11 на счетчик и на вход дополнительной схемы И. С помощью одновиоратора вырабатывается контрольный сигнал, продолжительность которого равна максимально возможному измеряемому интервалу и который блокирует прохождение импульсов стабильной частоты через дополнительную схему И во время измерения интервала.В случае пропадания одного нз пары входных импульсов устройство работает следующим ооразом. Оставшийся импульс...
Предыдущий патент: Устройство для управления реверсивным электроприводом
Следующий патент: Способ контроля аналоговых пневматических исполнительных механизмов
Случайный патент: Устройство для регулирования состава смеси