Способ компенсации люфта исполнительного устройства системы управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
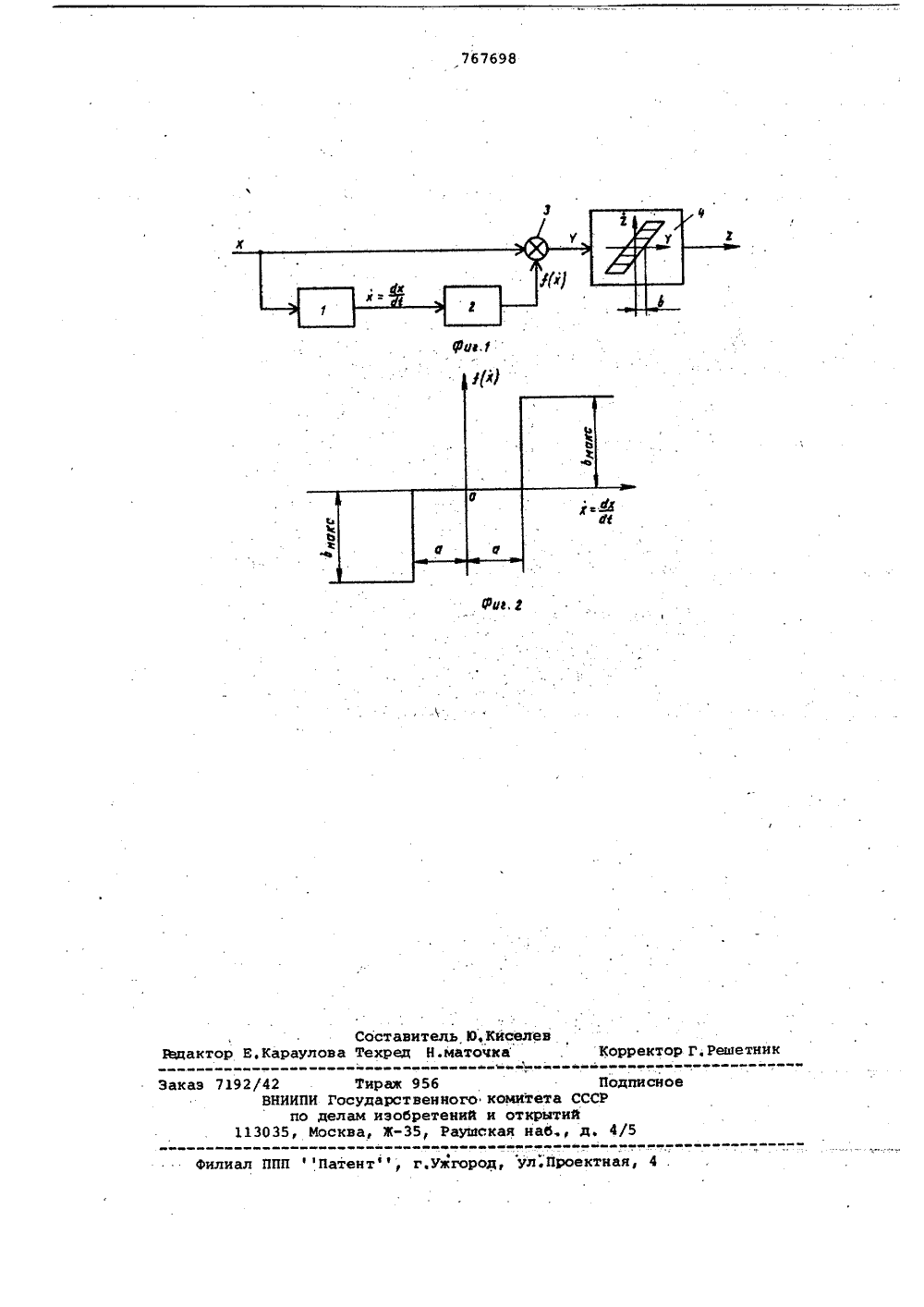
Союз Советских Социалистических РеспурликОПИСИЗОБРЕК АВТОРСКОМУ 76769 1) Дополнительное к 2) Заявлено 29,12.77 05 В 5/01 присоединением заяв Госудатет рствеииый комиСССРлам изобретеиии открытий. 23) Приоритет Опубликовано 30 Дата опубликован У 50.8) В.П.Вл 72) Авторы изобретени ов, Ю.Ф. Киселев, Н, А. Любимов и М. С. Чикулае 1) Заявитель 4) СПОСОБ КОМПЕНСАЦИИ ЛЮФТА ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА СИСТЕМЫ УПРАВЛЕНИЯИзобретение относится к способам компенсации нелинейности типа люфт, свойственной электромеханическим, механическим, пневматическим и гидравлическим элементам систем автоматического управления, и может приме-няться в системах автоматического управления (САУ) современными высокоманевренными самолетами.Известен способ компенсации люфта 10 в механической передаче, заключающийся в суммировании сигнала управления с сигналом коррекции, причем сигнал коррекции формируют путем преобразования сигнала, пропорционального разности углов поворота входного и вы- ходного валов механической передачи, в сигнал с тем же знаком и с постоянной амплитудой, равной полузоне люфта Г 13, ЮНаиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является способ компенсации люфта исполнительного устройства, заключающийся в 25 том, что оценивают знак производной сигнала управления, Формируют ступенчатый сигнал коррекции, амплитуда которого равна полуэоне люфта, а знак соответствует знаку производной сиг нала управления, и смещают сигнал управления на входе исполнительного устройства на величину сигнала коррекции 2).Недостатком этого способа является невозможность точной компенсации люфта исполнительного устройства из-за изменения в процессе эксплуатации истинной ширины полузоны люфта, которая зависит бт температуры окружающей среды, колебаний напряжения питания, степени износа и материала элементов исполнительного устройства, Таким образом,ри использовании данного способа на практике может иметьместо перекомпенсация люфта исполнительного устройства, когда величина сигнала коррекции превышает истинную величину полузоны люфта, и 1 недокомпенсация 1, когда величина сигнала коррекции мейьше йстинной величины полузоны люфта. В замкнутой системе самолет-САУ 1 существенная перекомпенсация 1 приводит к возникновению автоколебаний, частота которых близка к частоте изгибных колебаний конструкции самолета, что может привести к разрушению самолета, а при существенной недо- компенсации возможно возникновениеавтоколебаний недопустимо большой ам-,плитуды, что ухудшает точность управления,Целью изобретения является повыше-ние точности компенсации люфта и тем" самым увеличение точности управления.Это достигается тем, что по пред,рагаемому способу сигнал коррекцииФормируют в момент превышения абсолютной величиной производной сигнала управления сигнала, пропорционального"величине полузонй люфта.При этом величина сигнала .коррекции ранна предельно допустимой ширинеполуэоны люфта,На Фиг.1 изображена блок-схемасйстемц, реализующей предлагаемыйспособ; на Фиг2 - характеристикаФормирбват еля сигнала коррекции,Сигнал Г(х)коррекции формируют изуправляющего сигнала х (фиг,1), дляйго"предварительно измеряют его " ;производную х с помощью измерителя1 производной, Знак сигнала коррек-, "гйи-устанавливают в соответствии сознаком производной сигнала управления (см, характеристику формирователя 2 на фиг.2),Затем суммируют сигнал й(х) коррекции с сигналом х уп- . " равления на сумматоре 3 и суммарныйсигнал у подают на звено 4 (исполнительное устройство), имеющее характеристику типа люфт с полузоной Ь,В отличие от способа по прототипусигнал коррекции формируют только.вмомент превышения абсолютной величиной производной /х/ сигнала х управ леЪмя сигнала, пройорционального величине Ь полузоны люфта, для чего"оржрователь 2 сигнала коррекции имеетполуэону несувствительности,по скорос,и изменения производнойсигнала управления равную а (фиг,2),ЯйУЖниеа зависит от конкретных характеристик исполнительного устройства и других элементов системы уп= равМения,а также от конкретных параметров объекта управления и определяется экспериментально, Целесообраз"нО"для систем управления вйбирать"а Ь. Кроме того, величина сформиро "ванногосигнала коррекции должнабыть ранна "заданной предельно допустимой ширине полузоны люфта ЬВ замкнутой системе управленияавтоколебания проявляются в процессе,стабилизации, который характеризуется малыми величинами сигнала управления х и его производной х. Вследствиевведения полузоны нечувствительностишириной а при формировании сигналакоррекции предлагаемый способ в процессе стабилизации может вызвать либо точную компенсацию люфта, когдаЬ Ьмакс и /х/)а, либо"недокомпенсацйю , когда Ь=Ь,С,. и /х(а,В первом случае автоколебания не имеют места, во-втором - частота их настолько мала.(десятые доли герца),что не является помехой процесса управления,Использование данного способа15 обеспечивает но сравнению с известными способами увеличение точности:управления вследствие увеличения точности компенсации люфта и существенного уменьшения амплитуды автокое- -щ баний в замкнутой системе самолетСАу вплоть до полного их устранения Формула изобретения1, Способ компенсации люфта исполнигельного устройства системы управления, заключающийся в Формированиииз сигнала управления сигнала коррекЗО ции, знак которого соответствует зна ку производной сигнала управления, исуммировачии сигнала коррекции с сигналом управления, о т л и ч а ю щ и йс я тем, что, с целью повышения точ 35 ности компенсации люфта, сигналкоррекций формируют в момент превышения абсолютной величиной производной сигнала управления сигнала, пропорционального величине полузоны люф та2, Способ по п,1, о т л и ч а ющ и й с я тем, что формируют сигналкбррекции, величина которого равнапредельно допустимой ширине полуэонылюфта.Источники информации,йрййятые во внймайие при экспертизе1 Авторское свидетельство СССРР 531127, кл. 8 05 В 5/00, 1974.502, Авторское свидетельство СССРР 234010, кл. С 05 В 5/00, 1968 (прототип),тель Ю, КиселевН.маточка Корректор Г, Решетки 4 е еЬе ее Ев аэ 7192/42 Тираж ВНИИПИ Государс по делам иэ 113035, Москва, Ж
СмотретьЗаявка
2562768, 29.12.1977
ПРЕДПРИЯТИЕ ПЯ М-5904
ВЛАСОВ ВАСИЛИЙ ПЕТРОВИЧ, КИСЕЛЕВ ЮРИЙ ФЕДОРОВИЧ, ЛЮБИМОВ НИКОЛАЙ АЛЕКСЕЕВИЧ, ЧИКУЛАЕВ МАНУИЛ СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 5/01
Метки: исполнительного, компенсации, люфта, системы, устройства
Опубликовано: 30.09.1980
Код ссылки
<a href="https://patents.su/3-767698-sposob-kompensacii-lyufta-ispolnitelnogo-ustrojjstva-sistemy-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ компенсации люфта исполнительного устройства системы управления</a>
Устройство для обнаружения сигнала фазового пуска

Номер патента: 1760636
Опубликовано: 07.09.1992
Метки: обнаружения, пуска, сигнала, фазового
...сигнал фазового пуска поступает на обьединенные вход блока распознавания элементов сигналов 1, вход элемента задержки 5 и вход блока контроля достоверности 9, Назначение блока распознавания элементов 1 совпадает с назначением аналогичного блока устройства прототипа и состоит в оценке элементов СФП, С выхода блока распознавания элементов сигнала 1 оценки элементов сигнала фазового пуска поступают на вход анализатора символов сигнала 2, с выходного которого сигналы поступают на второй вход блока коррекции,Принимаемый сигнал поступает также на вход блока контроля достоверности 9. Если входной сигнал превышает верхний пороговый уровень, либо меньше нижнего порогового уровня, то на выходе блока контроля достоверности формируется сигнал...
Устройство для сжатия сигнала по времени

Номер патента: 565399
Опубликовано: 15.07.1977
Автор: Казанцев
МПК: H04B 3/46
Метки: времени, сжатия, сигнала
...коэффициентом усиления, преобразователь 7 аналог - цифра, преобразователь 8 цифра - аналог, умножитель 9 веса, причем вход преобразователя 7 и выход преобра зователя 8 дополнительно соединены с входампвычитающего устройства 10, выход которого подключен к регулирующему входу усилителя б. Выход одного из блоков 4 соединен с входом одного из умножителей 9, а выходы по- ЗО следних соединены с соответствующими вхо.дами сумматора 11, выход которого соединен с входом усилителя 12.Устройство работает следующим образом.Информационный сипнал, подлежащий сжатию по времени, поступает на вход пресбразователя 1, работающего в двоичном коде. Остаток преобразования подводится непосредственно к одному из блоков 2, Значе. ния групп, разрядов подаются в...
Устройство для формирования сигнала передачи данных

Номер патента: 655080
Опубликовано: 30.03.1979
Авторы: Анисимова, Болдин, Виноградов, Соловьев
МПК: H04J 1/14
Метки: данных, передачи, сигнала, формирования
...24 - 26 и умножитель 27 - 29 подключен к входу выходного сумматора 3 (фиг. 1).Устройство работает следующим образом, Потенциальная синхронная двоичная последовательность, поступающая со скоростью Р бод на вход узла разделения подканалов, преобразуется в четыре потенциальные двоичные последовательности со скоростью Р/4 бод в каждой (фиг. 2).При этом характеристические моменты знакоперемен четырех последовательностей на выходах блока 1 разделения следуют поочередно через интервалы времени 1/Р,Сигналы с выходов блока 1 разделения поступают на входы четырех схем равнозначности каналов 5 - 8, на вторые входы которых поступает сигнал видаг- з 1 дп (соз 24) + 0,51где- частота переноса спектра. В результате на выходе каждой из четырех схем...
Устройство преобразования размаха сигнала цветовой поднесущей в постоянное напряжение

Номер патента: 1314483
Опубликовано: 30.05.1987
Авторы: Басий, Дементьева, Мельник, Сташкив, Татарин
МПК: H04N 9/72
Метки: напряжение, поднесущей, постоянное, преобразования, размаха, сигнала, цветовой
...к С-входу Р-триггера 3. 45 83 2ность поступает на счетный вход счетчика 9, изменяя таким образом, состояние на его выходах, которые управляют мультиплексором 11, к информационным входам которого подключены Я выходов линии 10 задержки, на вход которой подаются импульсы с выхода компаратора 8. Разница в задержках двух соседних выходов линии 1 О задержки составляет Тц /М, где Тц, - период цветовой поднесущей. Поскольку при изменении состояния на выходах счетчика 9 к выходу мультиплексора 11 подключается его следующий вход, то на С-вход 0-триггера 3 воэ" действуют импульсы, частота следования которых1 йГ = ----- =ГййТ, ц КТ +цвСледовательно, на выходе интегратора 4 будет сформировано напряжение,амплитуда которого равна...
Способ формирования сигнала для коррекции искажений телевизионного изображения и устройство для его реализации

Номер патента: 1109945
Опубликовано: 23.08.1984
Авторы: Бычков, Грудзинский, Кузнецов, Кузьмин, Сапожников, Тимофеев
МПК: H04N 5/14
Метки: изображения, искажений, коррекции, реализации, сигнала, телевизионного, формирования
...соединен с сигнальным вы- .ходом датчика видеосигнала.На фиг. 1 приведены временныедиаграммы; на фиг. 2 - структурнаяэлектрическая схема устройства.Способ осуществляется следующим образом.Получают видеосигнал Б(С) развертыванием оптического эталонного изображения в виде чередующихся по произвольному закону черных, серых и белых участков, Этому видеосигналу присущи яркостные, геометрические искажения и искажения спектра пространственных частот. Одновременно формируют электронным способом электрический эталонный сигнал (эталон) Б (й), т.е. сигнал, кото- . рый должна формировать идеальная ТВ камера от эталонного изображения в случае отсутствия в ней всех видов искажений (фиг. 1 а,для чернобелого эталонного изображения). Кроме...
Предыдущий патент: Оптоэлектронное пороговое устройство
Следующий патент: Нелинейное изодромное корректирующее устройство
Случайный патент: Устройство для сопряжения с абонентами