Регулятор положения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
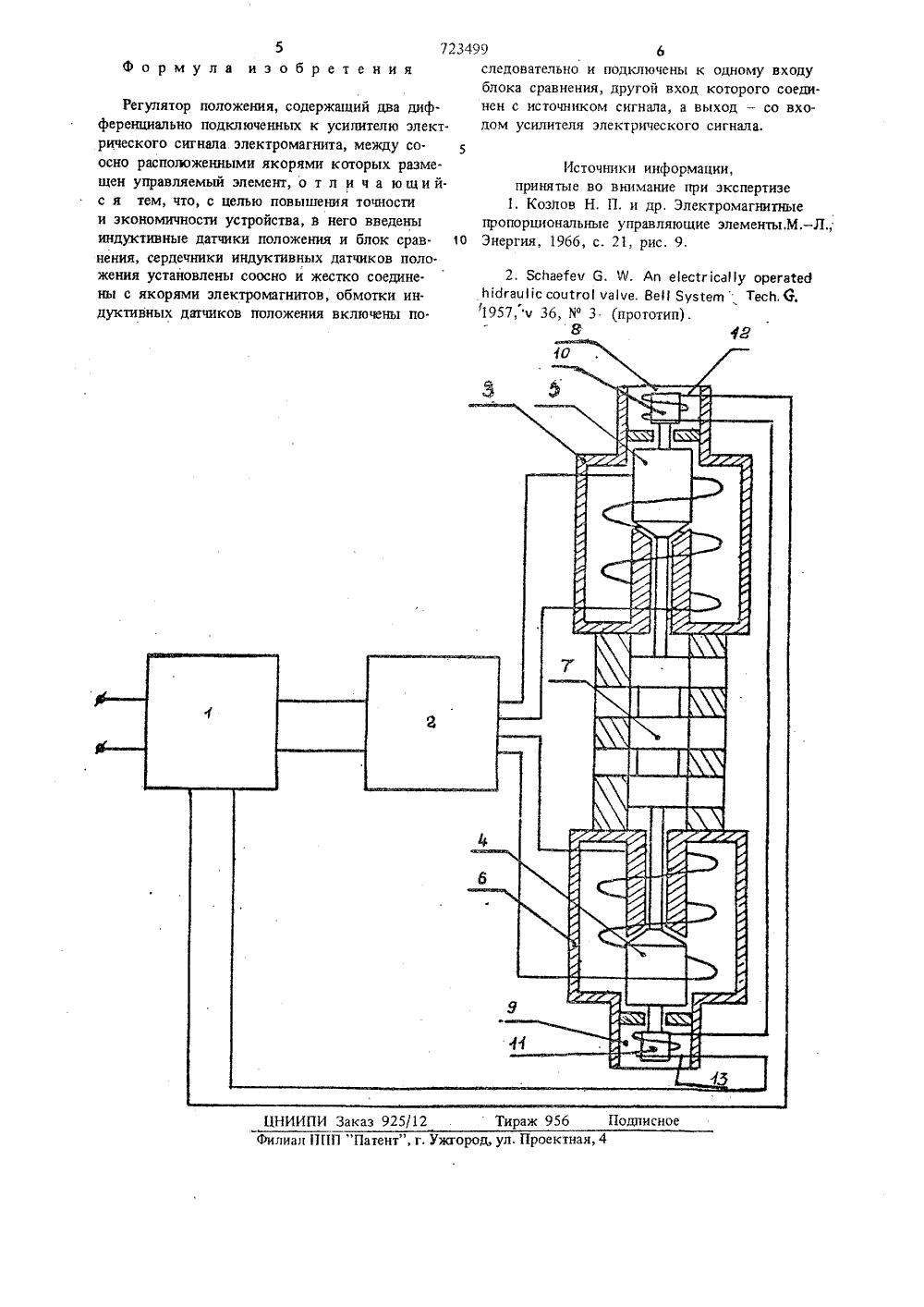
Союз Советски кСоциалистическихРеспублик ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 1723499.39 (088.8) Дата опубликования описания 25.03.80(54) РЕГУЛЯТОР ПОЛОЖЕНИЯ Изобретение относится к приборостроению и автоматике и может быть использовано в системах автоматического управления раз 11 ичными производственными процессами, в частности в электрагидравлических механизмах.Известны регуляторы положения, неподвижная часть которых содержит магнитную систему из одного или нескольких электромагнитов, а подвижная часть подключена к выходу усилителя управляющего сигнала и соединена с уп 1 О равляемым элементом. В этих устройствах пропорциональность преобразования обеспечивает.ся использованием уравновешивающих элементов 111.Наиболее близким к предложенному явля 15 ется регулятор положения, содержащий два дифференциально подключенных к усилителю электрического сигнала электромагнита, между соосно расположенными якорями которых раз. мешен управляемый элемент. Устройство снабжено уравновешивающей пружиной, обеспечивающей пропорциональность между задающим сигналом и перемещением якорей электромаг.нитов совместно с управляемым элементом 2. Ьыстродейстиие и точность такого регулятора положения зависят от характеристик уров. новешивающей пружины. Для уменьшения ошибок по положению подвижной системы преоб. разавателя, возникающих при воздействии на нее внешних возмущений, следует увеличить жесткость пружины, однако, это приводит к увеличению токов управления электромагнитов, т.е, к потерям мощности и уменьшению коэффициента полезного действия. Таким образом точность данного преобразователя, его способ. ность подавлять внешние возмущения ограниче. ны допустимым током управления и заланнай величиной коэффициента полезного действия.Недостаток устройства состоит в том, что необходимо поддерживать электрический так в обмотках электромагнитов даже при установившемся положении подвижной системы (если она установлена не в среднем положении), т.е. в момент, когда никакой полезной рабаты не совершается. Кроме того, наличие пружин уменьшает надежность преобразователя,Цель изобретения - повышение точности и экономичности устройства.72349 3Цель достигается тем, что в устройство введены индуктивные датчики положения и блок сравнения, сердечники индуктивных датчиков положения установлены соосно и жестко соединены с якорями электромагнитов, обмот. ки индуктивных датчиков положения включены последовательно и подключены к одному входу блока сравнения, другой вход которого соединен с источником сигнала, а выход - со входом усилителя электрического сигнала. 10Сущность изобретения поясняется чертежом, ра котором изображена схема устройства, управляемым элементом которого является золотник гидроусилителя.Устройство содержит блок 1 сравнения, уси литель 2 электрического сигнала, электромагни ты 3 и 4 толкающего типа с якорями 5 и б, управляемый элемент 7 (золотник гидроусилителя) и индуктивные датчики 8 и 9 положения с сердечниками 10, 11 и обмотками 12, 13.Блок 1 сравнения электрически связан с усилителем 2, в выходные цепикоторого включены обмотки электромагнитов 3, 4. Электромагниты 3, 4 не связаны между собой в магнитном отношении и выполнены в отдельных д корпусах, Магнитная цепь каждого из электромагнитов 3, 4 выполнена с зазором с полюсами конической формы и подмагничена током, поступающим в обмотки указанных электромаг-. нитов от усилителя 2. 30Между расположенными соосно якорями 5, б закреплен управляемый элемент 7. Благодаря .подмагничиванию, якоря 5, 6 плотно поджаты к элементу 7, образуя единую подвижную систему. 35В единых с электромагнитами 3, 4 корпусах расположены индуктивные датчики 8, 9 положения. Обмотки 12 и 13 датчиков 8, 9 подклю.чены к блоку 1 сравнения.Устройство работает следующим образом. 40Входной сигнал и сигнал датчиков 8, 9 положения сравниваются в блоке 1 сравнения, а затем их разность (сигнал рассогласования)поступает на вход усилителя 2, представляющего собой активный фильтр с заданными частотными характеристиками. Здесь сигнал рассогласования усиливается и поступает на обмоткиэлектромагнитов 3, 4.Через обмотки электромагнитов 3, 4 протекает ток, задаваемый усилителем 2, которыйусловно можно разделить на две составляющих.Первая составляющая, называемая синфазнымтоком, одинакова для обоих электромагнитов 3, 4 и обеспечивает их подмагничивание. Вторая составляющая, называемая дифференциальным током, также одинакова для обоих элект.ромагнитов 3, 4, ее величина пропорциональнасигналу рассогласования, но подается она таким образом, что в одном из электромагнитов 3, 4 9 4синфазный и дифференциальный токи суммируются, а в другом вычитаются.Подача входного сигнала приводит к появлению равных и противоположно направленныхизменений дифференциальных токов обмотокэлектромапппов 3, 4, т.е. в обмотке одногоиз электромагнитов 3, 4 ток уменьшается нанекоторую величину, а в обмотке другого увеличивается на точно такую же величину,При изменении знака входного сигнала ме.няется и направление дифференциального тока.При нулевом сигнале рассогласования, т,е.при полном соответствии положения элемента 7и якорей 5, 6 задающему сигналу,.дифференциальный ток отсутствует, и в обмотках элект.ромагнитов 3, 4 протекает только синфазныйток, подмагничивающий указанные электромагниты и обеспечивающий надежное соединениеякорей 5, 6 с элементом 7.При изменении входного сигнала на выходеблока 1 сравнения появляется сигнал рассогласования, приводящий к возникновению диффе.ренциального тока, вследствие чего электромагниты 3, 4 развивают различные по величинеусилия, Разностная сила, приложенная к подвиж.ной системе преобразователя, приводит к леремещению этой системы в направлении, действиясилы до того момента, когда сигнал датчикОв8, 9 положения сравняется с задающим спгна.лом. Тогда сигнал рассогласования, дифференциальный ток и, следовательно, разностная сила электромагнитов 3, 4 примут нулевое значение,Аналогичным образом работает устройство и при воздействии на его подвижную систему внешних возмущений, например, гидродинамических сил, приводящих к смещению подвижной системы из заданного положения. Однако в этом случае появление дифференциального тока приводит к компенсации внешних возмущений разностной силой электромагнитов 3, 4, Смещение подвижной системы, соответствующее необходимому для компенсации возмущений дифференциальному току, является ошибкой устройства, которая тем меньше, чем больше коэффициент передачи усилителя 2.Высокая точность отработки задающего сигнала и уменьшение влияния внешних возмущений обеспечены испояьзованием чувствительного датчика положения и большим коэффициентом передачи усилительного устройства.Уменьшение потребляемой устройством мощности обусловлено тем, что ток управления протекает через обмотки электромагнитов только при наличии сигнала рассогласования на выходе устройСтва сравнения и прекращается с приходом подвижной системы устройства в заданное положение.723499 5Формула изобретения Регулятор положения, содержащий два дифференциально подключенных к усилителю электрического сигнала электромагнита, между соосно расположенными якорями которых размещен управляемый элемент, о т л и ч а ющи йс я тем, что, с целью повышения точности и экономичности устройства, в него введены индуктивные датчики положения и блок срав. нения, сердечники индуктивных датчиков положения установлены соосно и жестко соедине. ны с якорями электромагнитов, обмотки индуктивных датчиков положения включены по. следовательно и подключены к одному входублока сравнения, другои вход которого соединен с источником сигнала, а выход - со входом усилителя электрического сигнала. Источники информации,принятые во внимание при экспертизе 1. Козлов Н, П. и др. Электромагнитные пропорциональные управляющие элементы.М. - Л 10 Энергия, 1966, с. 21, рис. 9.2. Ясйае 1 еч 6. Ч/. Ап еестгсау орегатедЬдгац с соцтго чауе. Ве ЯуатепзТесп.6.1957,ч 36, У 3 (прототип).8 8
СмотретьЗаявка
2383234, 02.07.1976
ПРЕДПРИЯТИЕ ПЯ В-8624
ИВАНОВ ВАЛЕРИЙ НИКОЛАЕВИЧ, ГУТНЕР ИГОРЬ ЕВГЕНЬЕВИЧ
МПК / Метки
МПК: G05B 11/01
Опубликовано: 25.03.1980
Код ссылки
<a href="https://patents.su/3-723499-regulyator-polozheniya.html" target="_blank" rel="follow" title="База патентов СССР">Регулятор положения</a>
Устройство стабилизации контактов датчика сигнала рассогласования

Номер патента: 491337
Опубликовано: 15.11.1975
Авторы: Калаев, Калоев, Козаев, Сужаев
МПК: A01B 69/00
Метки: датчика, контактов, рассогласования, сигнала, стабилизации
...и связаны кинематически соответственно с маятником и подвижным контактом датчика.На чертеже показан тракторньш агрегат при движении поперек склона с устройством стабилизации контактов датчика рассогласования.,Чаятник 1, расположенный на раме трактора, содержит рычаг 2, который упирается в штоки 3 поршней 4 гидравлических цилиндриков 5, жестко связанных с рамой трактора. Гидравлические цилиндрики 5 соединены гибкими трубками 6 с гидравлическими цилиндриками 7, которые расположены ца раме копирующего механизма, Цилиндрики 5 и 7 и соединяющие их трубки 6 заполнены маслом. Штоки 8 поршнеи 9 упираются в рычаг 10 корпуса 11 датчика, ца котором имеются неподвижные контакты 12. Подвижный контакт 13 жестко связан со щупом 14.Во время движения...
Автоматическое устройство для подачи сигнала “отсутствие абонента

Номер патента: 477555
Опубликовано: 15.07.1975
Автор: Барановский
МПК: H04M 1/64
Метки: абонента, автоматическое, отсутствие, подачи, сигнала
...через замкнутые переключающий 5 - 3 и размыкающий 5 - 1 контакты переключателя 5 и через нормально замкнутые контакты рычажного переключателя 20 20 с линией связи 3. При этом падение напряжения на шунте 15 не зависит от направления тока в линии, конденсаторы 9, 10 заряжаются от одинакового значения напряжения и ток через реле 13 не проходит.25 В случае отсутствия абонента переключатель 5 переводится вручную или автоматически в положение замкнутых переключающего 5 - 3 и замыкающего 5 - 2 контактов. При этом звонок 18 и конденсатор 19 соединены с 30 линией связи через диод 16, При поступленииотрицательной полуволны тока вызова диод. Теплов Курилко оставитеТехред Корректоры: инискинаалахова едактор Изд.1619 Тираж 74осударственного...
Устройство для приема сигнала времени

Номер патента: 1429341
Опубликовано: 07.10.1988
Авторы: Большаков, Каневский, Федоров, Шполянский
МПК: H04N 7/025, H04N 7/083
Метки: времени, приема, сигнала
...входам блока 1 индикации. Тактовые импульсы с выхода первого элемента ИЛИ 3 подаются такжеиа вход делителя 4 частоты импульсов,имеющего коэффициент деления, равный23, так как двадцатиразрядный код текущего времени имеет в своем составееще три проверочных разряда, Приэтом выходной сигнал делителя 4 частоты импульсов, поступающий на входФэлемента И 5, управляет подачей маркерного импульса, который заводитсяс выхода декодера 2 на вход элементаИ 5 и своим Фронтом производит записьинформации в электронные часы, Одновременно маркерный импульс используется для сброса делителя 4 частотытактовых импульсов, Для этого он подается на формирователь 8, где преобразуется в импульс, соответствующийего срезу, и через второй элемент ИЛИ9...
Устройство управления датчиком времени обучающей системы

Номер патента: 684597
Опубликовано: 05.09.1979
Автор: Соболевский
МПК: G09B 7/00
Метки: времени, датчиком, обучающей, системы
...сигнал, икод времени ф записывается в триггеры 14,Величина С 18 должна удовлетворять условию%9 2 Ст См, где Гг ИТ, - время пере 40ходкого процесса в триггере 14 и элементе И13 соответственно. Код о, с выходов триггеров14 через соответствующие элементы ИЛИ 15поступает на вход сумматоров 16, Через вре.мяЧф 1 +29 с момента поступления сигнала45от системы на вход 7, с выхода элемента задержки 19 единичный сигнал поступает на входэлемента ИЛИ 15 и с его выхода - на входпервого сумматора 16. В сумматорах 16 вычисляется значение Мс + 2 = (с . 1) вод Я"гдеп - число разрядов суммирования.Величина Г 1 выбирается такой, чтобы удовлетворялось следующее условие",СрС+2 Гтргде 2 ьгр взято из предположения, что времяпереходного процесса в...
Устройство для комплексного контроля дефектов в обмотке якоря электрической машины

Номер патента: 657527
Опубликовано: 15.04.1979
Автор: Чмищенко
МПК: H02K 15/00
Метки: дефектов, комплексного, обмотке, электрической, якоря
...6 на поступают на входыканалов индикатора, и егэ схема остаатсяв исходном положении, Горит лампа 16(" Годен" ), сигнвлизирующвя о годностипроверяемого якоря. Через 4-5 с посленачала работы устройства реле 2 времени отключает двигатель приводного механизма 1 от сати, а индуктор 4-от генервтэра 3, Устройство прекращает работу И БЭЗВРВШВЕТСЯ В НтВЧапЬНОЕ ПОЛОЖЕНИЕ.При проверке дефектного якоря в приемниках 5 и 6 возникают сигналы, индуктирэванные полем якоря,При малых ВиткэВБх замыканиях поле в якоре возникает В основном нв участках короткозамкнутых витков. При наличии крупных вцтковых замыканий в одной из возбуждаемых секций в обмотке якоря нарушается взвлмивя компенсация индуктцрэвзнных ЗДСу что прцводит к пэявл 8 нию тока не только в...
Предыдущий патент: Дискретный электропривод с импульсной системой фазирования
Следующий патент: Система автоматического управления технологическими параметрами
Случайный патент: Стабилизатор напряжения постоянного тока