Система программного управления для робота-манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
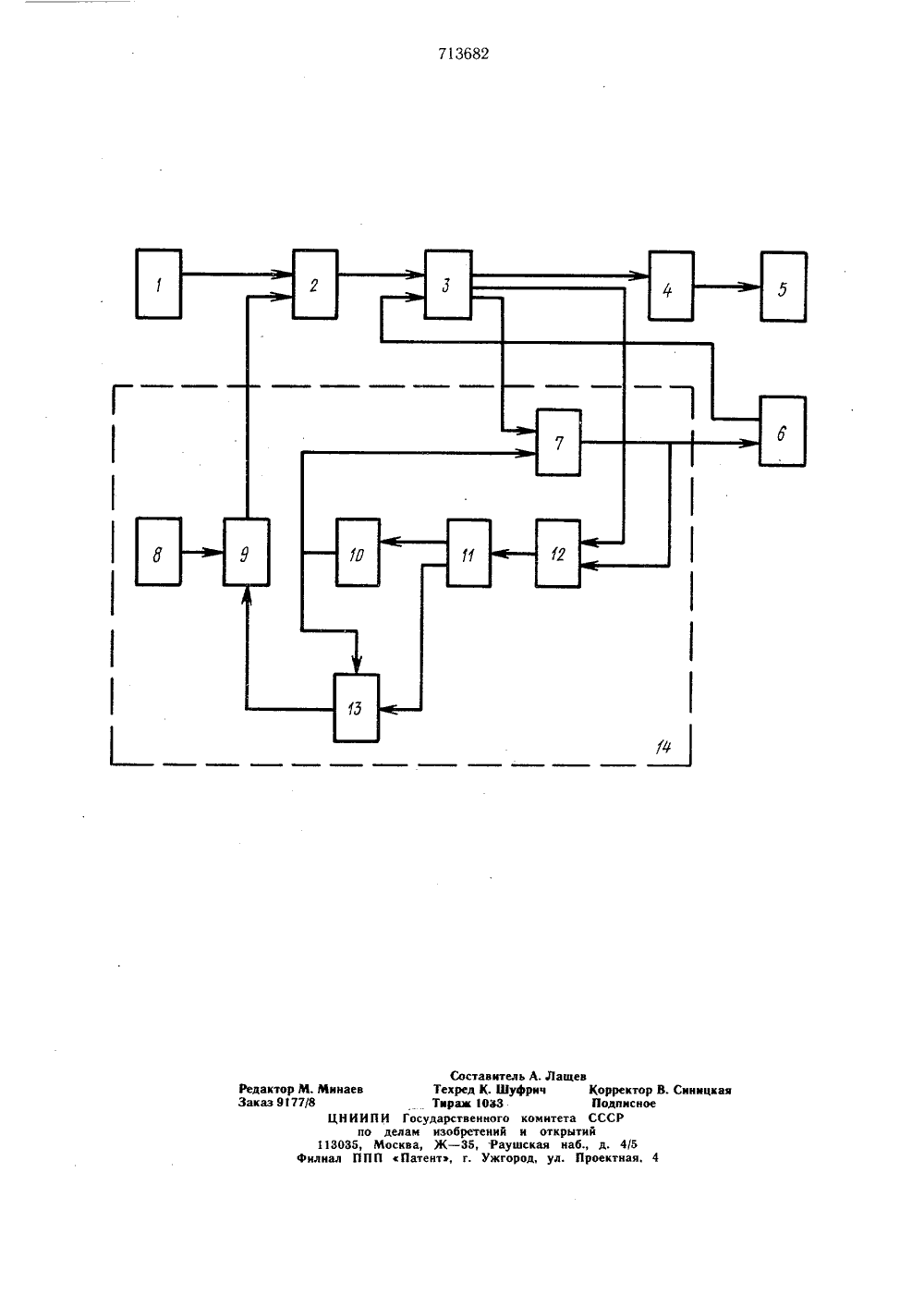
Сотоз Советских Социалистицеских РеслубликОП ИСАНИ ИЗОБРЕТЕН И К АВТОРСКОМУ СВИДИТЕЛЬСТ 3682 1Ы,1 9/О присоединением заявки-23) Приоритет -Опубликовано 05.02.80. БюллетеньДата опубликования описания 15,02.8 асударотааиныи намитет СССР по делам изооретений и открытий2-50 72) Авторы изобретения оро Г. Тимошенко и(71) Заявител ени асного Ордена Ленина и ордена Трудовогоинститут электросварки имени Е. О аинской С она А ЕМА ПРОГРАММНОГО УГ 1 РАВЛЕЧЯ РОБОТА-МАНИПУЛЯТОРА(54) Изобретение относится к области програм. много управления многокоординатными устроиствами и может быть использовано для управления движениями рабочего органа промышленного робота, например при точечной сварке.Известная система программного управления роботами-манипуляторами, содержащая штеккерный барабан, узлы сравнения, приводы, датчики положений, блок цифровой индикации и цифро-печатающий блок 1, имеет низкую точность, а процесс обучения ее сложен.Наиболее близким техническим решением к данному изобретению является система 2, содержащая последовательно соединенные блок ручного управления, управляемый генератор, блок каммутации, шаговый привод и исполнительный орган и элемент И, выход которого подключен к первому входу реверсивного счетчика и ко входу блока памяти, выход блока памяти соединен со вторым входом блока коммутации, второй выход которого подключен ко второму входу реверсивного счетчика, а третий выход к первому входу элемента И. 2Эта система обладает низкими точностьюи быстродействием из-за колебаний рабочего органа при позиционировании, так как при выполнении точечной сварки сварочный инструмент необходимо перемещаТь с частотой 60 точек в минуту и выше. Приводы при этом работают в тяжелом старт-стопном режиме, а наибольшее влияние на качество переходного процесса оказывает исполнительный орган, представляющий собой колебательное звено второго порядка с до- В вольно большими величинами постоянныхвремени.Целью изобретения является повышениеточности и быстродействия системы. Это достигается тем, что предлагаемая система содержит блок эталонного сигнала и последовательно соединенные цифроаналоговый преобразователь, нуль-орган, блок запоминания амплитуды и регулируемый усилитель, выход которого подключен ко второму входу управляемого генератора, а второй вход 20 к выходу блока эталонного сигнала, входцифроаналогового преобразователя соединен с выходом реверсивного счетчика, а второй его выход - со входом блока запоминания амплитуды, выход нуль-органа подключен ко второму входу схемы совпадения.На чертеже показана блок-схема системы программного управления роботом-манипулятором, на котором указаны блок 1 ручного управления, управляемый генератор 2, блок 3 коммутации, шаговый привод 4, исполнительный орган 5, блок 6 памяти, элемент 7 И, блок 8 эталонного сигнала, регулируемый усилитель 9, нуль-орган 10, циф роаналоговый преобразователь 11, реверсивный счетчик 12, блок 13 запоминания амплитуды, блок 14 обучения.Система работает следующим образом.В процессе обучения оператор, воздействуя на рукоятку блока 1 ручного управления перемещает исполнительный орган 5 в необходимую точку пространства, при этом импульсы с генератора 2 поступают одновременно на привод 4 и реверсивный счетчик 12, где происходит алгебраическое суммирование информации о координатных перемещениях. Величины покоординатных перемещений, зафиксированные в реверсивном счетчике 2, через цифроаналоговый преобразователь 11, поступают на блок 13 запоминания амплитуды, который подключен к регулируемому усилителю 9, и устанавливают на нем коэффициент усиления, пропорциональный величине перемещения, зафиксированной в счетчике 12. Сигналы нуль-органа 10, подключенного к цифроаналоговому преобразователю 11, поступают на один из входов элемента 7 И,Информацию из блока 14 обучения можно переносить в блок 6 памяти, в качестве носителя информации в котором может быть использована магнитная лента. Оператор, нажав кнопку запускает блок 8 эталонного сигнала. Этот блок вырабатывает сигналы оптимального перемещения от точки к точке по каждой координате, которые поступают на усилитель 9, а затем на управляемый генератор 2. Последний вырабатывает импульсы с частотой, пропорциональной сигналу, поступающему на его вход, которые через блок 3 коммутации, элемент 7 И поступают в блок 6 памяти. Одновременно эти импульсы поступают на вычитающий вход реверсивного счетчика 12. После того, как вся информация о перемещении исполнительного органа 5 из точки в точку вычтется из реверсивного счетчика, нуль-орган 10 закроет элемент 7 И. Одновременно нуль-орган 10 сбросит на нуль блок 13 запоминания амплитуды, После этого ведут программирование перемегцений до следующих точек. В автоматическом режиме блок 4 обучения отключается и программа с блока 6 памяти поступает через блок 3 коммутации на приводы 4, перемещая исполнительный орган 5 по подготовленной программе.В эксплуатации робот-манипулятор комплектуется системами по количеству его степеней подвижности, и блок обучения при этом может быть выполнен в виде отдельного узла для одного робота или целой группы роботов.Примечение изобретения позволит получить. производительность до 100 точек в минуту, тогда как производительность современных зарубежных образцов роботов составляет до 50 точек в минуту.Формула изобретенияСистема программного управления дляробота-манипулятора, содержащая последовательно соединенные блок ручного управления, управляемый генератор, блок коммутации, шаговый привод и исполнительныйорган, и элемент И, выход которого подключен к первому входу реверсивного счетчикаи ко входу блока памяти, выход блока памяти соединен со вторым входом блока коммутации, второй выход которого подключенко второму входу реверсивного счетчика, атретий выход - к первому входу элементаИ, отличающаяся тем, что, с целью повышения точности и быстродействия, система содержит блок эталонного сигнала и последовательно соединенные цифроаналоговый преобразователь, нуль-орган, блок запоминания амплитуды и регулируемый усилитель,выход которого подключен ко второму входу управляемого генератора, а второй входк выходу блока эталонного сигнала, входцифроаналогового преобразователя соединен с выходом реверсивного счетчика, а второй выход - со входом блока запоминанияамплитуды, а выход нуль-органа подключен ко второму входу элемента И.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР377230, кл. В 259/00, 02.10.71.2. Авторское свидетельство СССР541147, кл. б 05 В 19/42, 11.02.72 (прототип).Составитель А. Лащев Редактор М. Минаев Техред К. Шуфрнч Корректор В. Синицкая Заказ 9177/8 Тираж 933 Подписное КН И И ПИ Государственного комитета СССР по дедам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 Филиал ППП Патентэ, г. Ужгород, ул, Проектная, 4
СмотретьЗаявка
2447236, 25.01.1977
ОРДЕНА ЛЕНИНА И ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА АН УКРАИНСКОЙ ССР
ТИМОШЕНКО ВСЕВОЛОД ГЕОРГИЕВИЧ, ФЕДОРОВ ВАЛЕРИЙ СЕРГЕЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: программного, робота-манипулятора
Опубликовано: 05.02.1980
Код ссылки
<a href="https://patents.su/3-713682-sistema-programmnogo-upravleniya-dlya-robota-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления для робота-манипулятора</a>
Реверсивный десятичный счетчик

Номер патента: 822381
Опубликовано: 15.04.1981
Автор: Баранов
МПК: H03K 27/00
Метки: десятичный, реверсивный, счетчик
...начиная с второго разряда млад. шей тетрады, переписываются без изменениячто дает н результате код0000,0001 (один) .Если, например, с выхода регистра сдвига 4 считывается двоично"десятичный код 0000,0111 (семь), то в его инвертированном коде первая еди. ница сформируется н четвертом разряде младшей тетрады, после которой двоичный код второй тетрады переписывается в прямом коде. В результате сформируется дноично-десятичный код 0000.1000 (носемь)Следовательно, в младшей тетраде двоично-десятичного кода осуществляется двоичный счет благодаря управлению блоком обращения кода 4 сигналами прямого выхода триггера 7Блок коррекции 3 в режиме дноичного счета от О до 9 выполняет функцию регистра сдвига на два разряда,дополняя регистр сдвига 8 до...
Реверсивный десятичный счетчик

Номер патента: 319080
Опубликовано: 01.01.1971
Автор: Пытл
МПК: H03K 23/72
Метки: десятичный, реверсивный, счетчик
...триггера Т; выходной импульстриггера Т, подается на вход установки еди319080 Шийа сложенияЦНИИПИ Заказ 1027/16 Изд,457 Тираж 473 Подписное Типография, пр. Сапунова, 2 ницы триггера Т выходной импульс триггера Т подается на вход установки нуля управляющего триггера, При вычитании выходной импульс триггера Т, подается через схему Из на вход установки единицы триггера Т, и через схему Иа - на счетный вход триггера Т,; выходной импульс триггера Т, подается на вход установки нуля триггера Т 4, выходной импульс триггера Т подается на вход установки единицы управляющего триггера Т выходной импульс триггера Т, при совпадении с выходными напряжениями триггеров Та и Т (триггеры Тв - Т, находятся в состоянии О) через схему И подается на вход...
Устройство для считывания графической информации

Номер патента: 742981
Опубликовано: 25.06.1980
МПК: G06K 11/00
Метки: графической, информации, считывания
...разряда каждого изэтих счетчиков определяет знак, а20 остальных - абсолютную величину при-;ращений. При положительной величинеперемещений по осям Х и У триггерастаршего разряда счетчиков 22 и 23,работающих в обратном коде, находятд 5 ся в нулевом, а при отрицательнойв единичном состоянии,При нажатии кнопки 18 запускаетсяузел управления-ввода 17 блока16, подавая на соответствующие входыэлементов 25 И управляющий сигнал,до которому происходит перезаписьсодержимого счетчика 23 в регистр24, Затем блок 16 вырабатывает сигнал управления блоком 27 и осуществляется выход информации, хранящейсяв регистре 24 и в реверсивном счетчике 22, на перфоленту или перфокарту, На промежуточном носителе информации приращения координат фиксируют 40 ся в...
Устройство распознавания радиосигналов

Номер патента: 767676
Опубликовано: 30.09.1980
Автор: Рембовский
МПК: G01S 7/28, H04L 27/14
Метки: радиосигналов, распознавания
...в соответствии с таблицей, 3Если модулирующая функция радиосигнала представляет собой манипулированный сигнал, напряжение на пер вом входе блока 24 вычитания и на выходе блока 27 клиппирования (т.е. на втором входе блока 24 вычитания) представляет собой одну и ту же функцию времени. При этом напряжение на 5 О выходе блока 24 вычитания и, соответ ственно, на выходе решающего блока 25 равно нулю.На выходе компаратора нуля 28 в моменты времени, соответствующие переходам через нуль модулирующей функции, появляются "импульсы, поступающие на вход "Вычитание" реверсивного счетчика 31, На выходе дифференцирующего блока 29 появляется последователь- О ность импульсов, возникающих при дифференцировании переходов с "единицы" к "нулю" и с "нуля" к...
Устройство для управления вентильным преобразователем

Номер патента: 786817
Опубликовано: 30.08.1986
Авторы: Кутузов, Соколовский, Толстиков
МПК: H02M 3/10
Метки: вентильным, преобразователем
...подключен к второму входусумматора.На фиг,1 показана функциональнаясхема устройства управления вентильным преобразователем на фиг.2зпюры напряжений, поясняющие работуустройства управления.Устройство содержит датчик 1 тока, выпрямитель 2, звено 3 дифференцирования, первый нуль-орган 4, ограничительную цепочку 5, КБ-триггер6, второй нуль-орган 7, интегратор8 с цепью 9 ускоренного разряда,интегратор 10 с ключем 11 сброса,сумматор 12, арккосинусный фазосдвигающий блок 13, датчик 14 состояния тиристоров, подключенный кпреобразователю 15,На вход датчика 1 тока поступает якорный ток двигателя 16, выход датчика 1 тока подключен к входу выпрямителя 2, выход выпрямителя 3 подключен к входу звена 3 дифференцированиявыход которого подключен к...
Предыдущий патент: Приемное устройство
Следующий патент: Способ виброуплотнения жесткой бетонной смеси
Случайный патент: Приспособление для зажима уточной нити на бесчелночном ткацком станке