Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 703776
Автор: Васильев
Текст
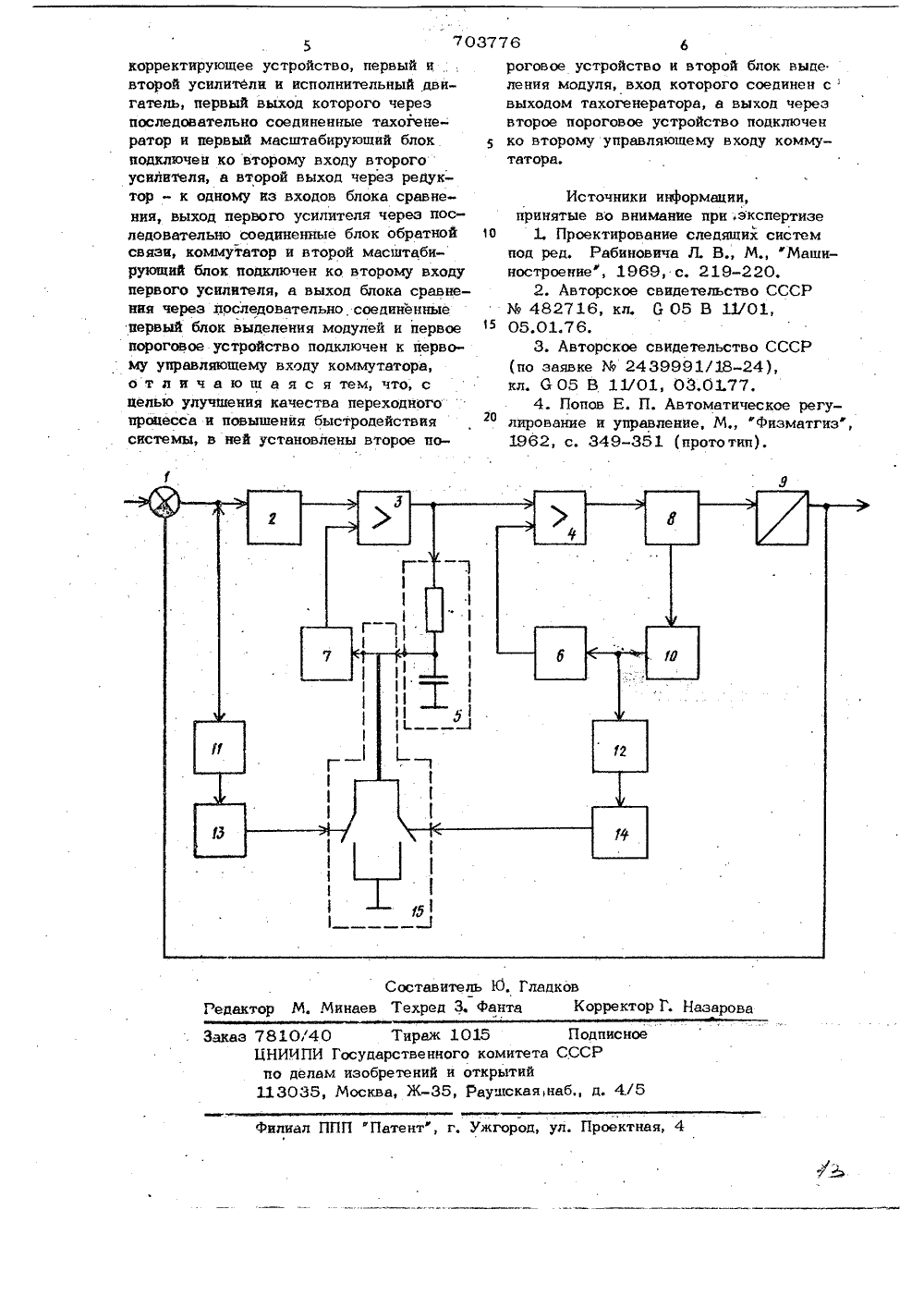
СПИ ИЗОЬ К АВТОРСКО Союз Сове Соцналистичес республик Т СВИ(54) СЛЕ ИСТЕМА и при дине Изобретение относится к области автоматического регулирования и может быть использовано в радиотехнике и при- боростроении.Известны следящие системы, содержащие блок сравнения, корректируктпее уст- ф ройство, первый и второй усилители и исполнительный двигатель, охваченный скоростной обратной связью, в которых осуществляется переключение коаффициента обратной связи в зависимости от уровня10 модуля сигнала рассогласования И -3,31.Иэ известных следящих систем, наиболее близкой по технической сущности является следящая система, содержащая3 последовательно соединенные блок сравнения, корректирующее устройство, первый и:второй усилители и исполнительный двигатель, первый выход которого через последовательно соединенные тахо- генератор и первый масштабирукщий блок подключен ко второму входу второго усилителя, а второй выход через редуктор подключен к одному из входов 2блока сравнения, выход первого усилителя через последовательно соединенные блок обратной связи, коммутатор и второй масштабирующий блок подключен ко второму входу йервого, усилителя, а выход блока сравнения через последовательно соединенные первый блок выделения модуля и первое пороговое устройство подключен к первому у 33 равлякщему входу коммутатора 43Недостатком известной следя 3 йейсистемы является плохое качество переходного процесса и его большая дли тельность в режиме синхронизации ступенчатом входном воздействии,Целью настоящего изобретения является улучшение качества переходного процесса й повышение быстродействия системы. Эго достигается тем, что в предлагаемой системе установлейы второе пороговое устройство и второй блок выделения модуля, вход которого соен с выходом тахогенератора, а выход через второе пороговое устройство703776 3подключен ко второму управлякщему вхо ду коммутатора.Блок-схема устройства представлена иа чертеже, где приняты следующиегобозначения: блок, 1 сравнения, корректирукйее устройство 2, первый и второй усилители 3, 4, блок 5 обратной связи первый и второй масштабирукщий блоки 6, 7, исполнительный двигатель 8, редуктор 9, тахогенератор 10, первый и 1 О второй блоки 11, 12 выделения модуля, первое и второе пороговое устройства 13, 14 коммутатор 15.Следящая система работает следующим образом. 15В режиме слежения с усилителя 3 (усилителя напряжения) снимается сигнал компенсации. Через блок 5 обратной связи (инерционное звено) этот сигнал постунает на вход второго масштабирую щего блока 7, с выхода которого сигнал, масштабированный до величины скоростной ошибки, подается со знаком (+) на вход усилителя 3. При этом происходит компенсация скоростной составляющей ошибки системы.С помощью масштабирующего блока 6 (делителя напряжения) устанавливается необходимая глубина отрицательной об- ратной связи, которая уменьшает ошибку от ухода параметров усилителя 4 (усилителя мощности) и исполнительного двигателя 8 при изменении внешних условий до требуемой величины.Когда на вход следящей системы сигнал не поступает, на второй управляющий вход коммутатора 15 поступает открываю- щее напряжение и конденсатор блока 5 обратной связи (инверционного звена)40 разряжается. При этом корректирующая . положительная обратная связь отключается, что благоприятно сказывается на устойчивости следящей системы.При подаче на вход следящей системы единичного ступенчатого воздействия, переходный процесс будет соответствовать переходному .процессу следящей сйстемы с жесткой тахометрической отрицательной обратной связью, так .как коррек 50 тирующая положительная обратная связь в начальный момент отключена.При подаче на вход больших рассогласований (в десятки и сотни раз превышающих зону линейности следящей системы), а также при синхронизации следящей системы с больших углов рассогласования на первый управляющий вход коммутатора 15 поступает открывающее,4напряжение, конденсатор блока 5 обратной связи (инерционного звена) разряжается. При этом корректирующая положительная обратная связь отключается, а подключение ее произойдет, когда ошибка системы уменьшится до величины, не превышающей зоны линейности следящей системы с отключенной корректирующей положительной обратной связью, Качество переходного процесса и быстродействия значительно улучшаются. В известной следящей системе с добротностью по скорости Кп = 30 с, постоянной времени инерционного звена 5 Т ; 0,1 с, постояннойвремени двигателя с учетом жесткой тахометрической обратной связью Тцв 0004 е при синхронизациисистемы с угла 8 величина перерегули 3рования составила 200%, длительностьпереходного процесса 1,5 с. Использование предлагаемого технического решения позволяет уменьшить перерегулирование в 8-10 раз, а длительность пере-.ходного процесса в 7-8 раз,Блок 12 выделения модуля предназначен для выдачи сигнала одной и той жеполярности при изменении знака скоростиобработки, необходимого для срабатывания порогового устройства 14.Блок 11 выделения модуля предназначен для выдачи сигнала одной и тойже полярности при изменении знака ошибки следящей системы, необходимого длясрабатывания порогового устройства 13,Корректирующее устройство, в качестве которого применяется усилительнопреобраэовательное устройство, предназначено для подавления квадратурной сос- .тавляющей сигнала рассогласования иМожет содержать предварительный усилитель, фазовый детектор и модулятор.Использование предлагаемого технического решения позволяет улучшить качество переходного процесса в режимесинхронизации и при ступенчатом входном воздействии и повысить быстродействие системы,Кроме того, при останове системыпроисходит отключение корректирующейположительной обратной связи, что приводит к увеличению устойчивости сисформула изобретения Следящая система, содержащая последовательно соединенные блок сравнения,Источники информации,принятые во внимание при экспертизе10 1 Проектирование следящих системпод ред, Рабиновича Л. ВМ"Машиностроение, 1969, с, 219-220,2, Авторское свидетельство СССРЖ 482716, кл, 0 05 В 11/01,05.01.76.3. Авторское свидетельство СССР7810/40 Тираж 1015ЦНИИ ПИ Государственного комитетапо делам изобретений и открытий113035, Москва, Ж, Раушскаян дписноеСР ака б., д, 4. П "Патент", г, Ужгород, ул. Проектная, 4 ли 5 703 корректирующее устройство, первый и второй усилители и исполнительный двигатель, первый выход которого через последовательно соединенные тахогенератор и первый масштабирующий блок подключен ко второму входу второгоусилителя, а второй выход через редуктор - к одному из входов блока сравнения, выход первого усилителя через последовательно соединенные блок обратной связи, коммутатор и второй масштабирующий блок подключен ко второму входу первого усилителя, а выход блока сравнения через последовательно, соединенные первый блок выделения модулей и первое пороговое устройство подключен к первому управляющему входу коммутатора, о т л и ч а ю щ а я с я тем, что, с целью улучшения качества переходного процесса и повышения быстродействия системы, в ней установлены второе по 776 6роговое устройство и второй блок выде ления модуля, вход которого соединен свыходом тахогенератора, а выход через второе пороговое устройство подключен ко второму управляющему входу коммутатора,
СмотретьЗаявка
2513727, 02.08.1977
ПРЕДПРИЯТИЕ ПЯ А-7162
ВАСИЛЬЕВ СЕРГЕЙ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящая
Опубликовано: 15.12.1979
Код ссылки
<a href="https://patents.su/3-703776-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Устройство для управления включенными параллельно по входу и выходу n статическими преобразователями частоты

Номер патента: 1665479
Опубликовано: 23.07.1991
Авторы: Артюхов, Величкина, Желев, Серветник, Томашевский
МПК: H02M 5/44
Метки: включенными, входу, выходу, параллельно, преобразователями, статическими, частоты
...случае появляется сигнал логической единицы:на выходе компаратора 16 и происходит подача импульса на вычитающий вход счетчика 31. Соответствующий выход логического блока 26 обнуляется, что приводит к выключению преобразователя.После каждой выдачи команды на вклю чение или отключение преобразователей производится повторный опрос компараторов 15 и 16, Для обеспечения устойчивой работы системы этот опрос производится с некоторой задержкой, определяемой эле ментом 25. Если за это время какой-либо из компараторов не изменил свое состояние, то происходит выдача команды на включение (или отключение) еще одного преобразователя. Импульсы на первый 27 и второй 28 входы логического блока 26 поступают до тех пор, пока будет выполняться одно из...
Устройство для преобразования циклического (п, к)-кода в системах с обратной связью

Номер патента: 860329
Опубликовано: 30.08.1981
Автор: Келлер
МПК: H03M 13/51, H04L 1/12
Метки: к)-кода, обратной, преобразования, связью, системах, циклического
...с начальным состоянием при шифрации, то это свидетельствует оправильности передачи сообщения. Если имеютместо ошибки, то в результате дешифрацииустройство приходит в нулевое состояние, свидетельствующее о необходимости повторениясообщения. Например, если по обратной линииприходит квитанция (11), то элемент И 7закрыт и после сдвига устройство приходит внулевое состояние,Рассмотрим использование устройства на приемной стороне в системе КОС при 1 - ЯГ:фна примере передачи того же сообщения с номером ЧПредварительно устройство переводится врежим дешифрации, для чего все ячейки устанавливаются в состояние "1. Если ошибокнет,то на выходы прямой линии связи поступает последовательность (1 О) (11), дешифрациякоторой занимает два такта. На первом...
Устройство для контроля системы телемеханики с решающей обратной связью

Номер патента: 1029208
Опубликовано: 15.07.1983
Авторы: Петренко, Сахно, Фролов
МПК: G08C 25/02
Метки: обратной, решающей, связью, системы, телемеханики
...входыэлементов И 34 и 35, на выход 53-иблока 3 и через элемент ИЛИ 41 навыход 54 блока 3.В случае, когда встроенный контроль закончился, т,е, система телемеханики работает в режиме функционирования, на входе 44 блока 1(фиг.2) присутствует сигнал отрицательной полярности, поступающейна вход элемента И 18. Тогда и на 4 Овыходе элемента И 18 присутствуетсигнал отрицательной полярности,поступающий на входы установки вноль счетчиков 28 и 29 и запрещающийих функционирование. 45В случае, если предлагаемое устройство работает в режиме контроля,через вход 44 блока 1 на вход элемента И 18 поступает сигнал положительной полярности, снимаемый с выхода элемента ИЛИ 41 блока 3.На входе 43 блока 1 всегда присутствует сигнал отрицательной...
Система управления вибростендом
Номер патента: 1117588
Опубликовано: 07.10.1984
Авторы: Гусев, Ксенофонтов, Маленький, Прохоров
МПК: G05B 19/02, G05D 19/00
Метки: вибростендом
...входом первого блока управления усилением, и генератор импульсов, соединенный выходом с его тактовым входом, введены второй предварительный усилитель и второй блок управления усилением, подключенный выходом -к управляющему входу первого усилителя с регулируемым коэффициентом передачи, вход которого связан с выходомалгебраического сумматора, а выход -с входом усилителя мощности, задающийвход второго блока управления усилением подключен к источнику регулируемого опорного напряжения, тактовыйвход - к выходу генератора импульсов,а вход фактического значения сигна-ла - к выходу первого предварительного усилителя, вход фактического значения сигнала первого блока управления усилением подключен к выходу усилителя обратной связи и к...
Аналоговый оптимизатор числа запасных блоков технической системы

Номер патента: 1285496
Опубликовано: 23.01.1987
Авторы: Бороденко, Зиборов, Зубков, Казарцев, Пшеничный
МПК: G06G 7/48
Метки: аналоговый, блоков, запасных, оптимизатор, системы, технической, числа
...подается на первый вход блока 4, на второй вход которого подается значение приведенной стоимости с вь;хода узла 25. С выхода блока 4 снимается сигнал, пропорциональный значению Ь .(О), ко 4торый сравнивается с установленным .85496 5 12 пасных блоков 1-го типа на один блок, и решение аналогично продопжается до тех пор, пока не окажется, что Ь (О)с Ь, .тогда срабатывает коммутатор 22, отключая блок 10 от источника 23 напряжения и подключает к нему блок 9 "Установить и - 1". При этом коммутатор 22 подключает первый выход узла 2 к входу блока 5. В результате напряжение на блоке 5 увеличивается на величину, пропорциональную Т (и). Аналогично определяется чис ло запасных блоков каждого типа,После выполнения М шагов решения на выходе...
Предыдущий патент: Устройство для определения функций чувствительности системы автоматического управления
Следующий патент: Гидравлический изодромный регулятор
Случайный патент: Вибрационный водонодъемник погружного типа