Система управления электрогидравлическим манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
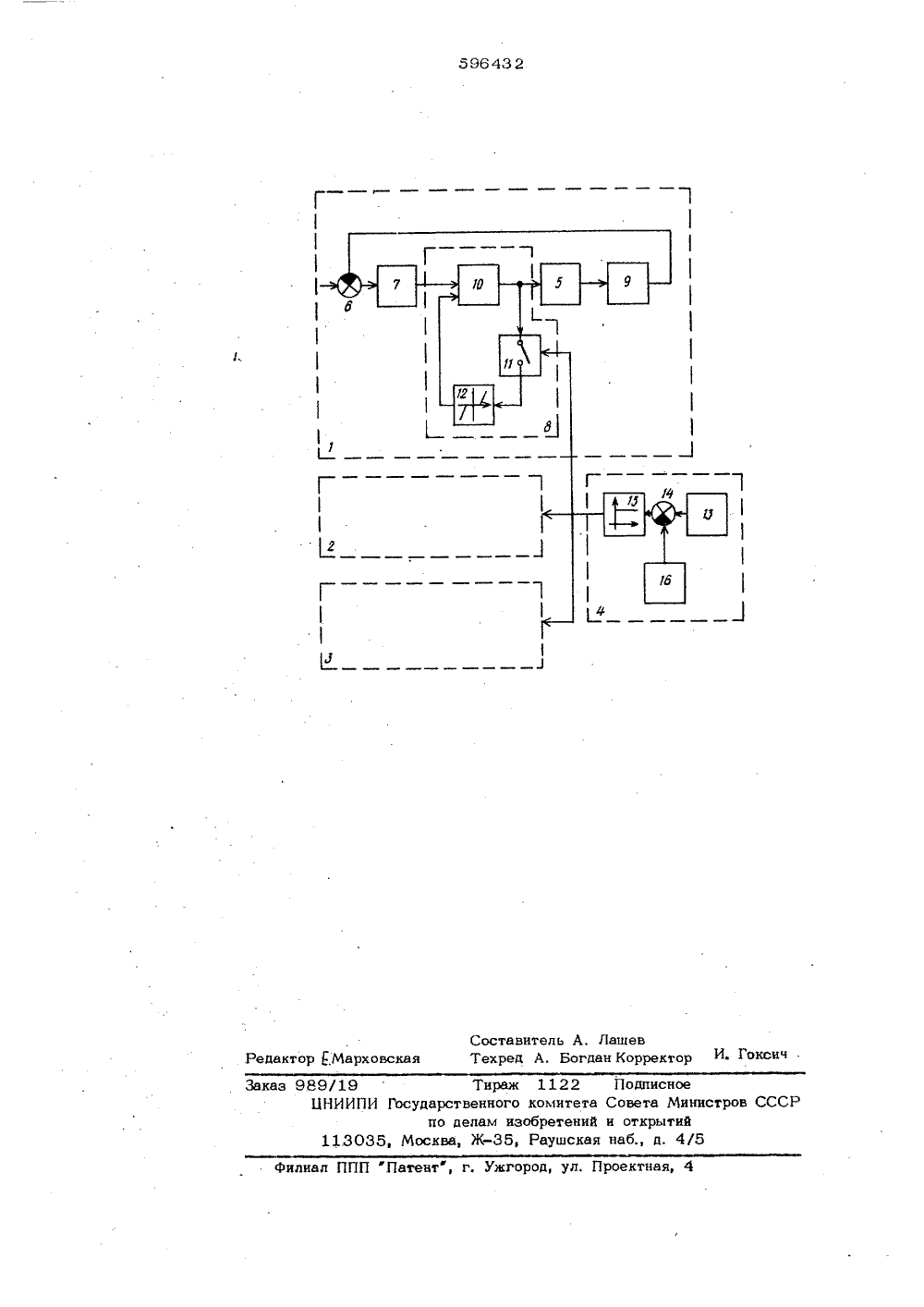
Союз СоветскихСоциалистицескихРеспублик ОП ЙСАНЙЕ(61) Дополните (22) Заявлено 0 ое к авт. свид-ву 76(21) 2364258/25-2 М, Кл,. 5 1 13/00 аявкимоедннен суДврственный комет оввтв Ннннстрав ССС по делам нзоаретеннйн открмтнй(45) Дата опубликования описания 07.02,7 3) УДК 62-50(08(72) Авторы изобретени В Илюхин, А, В, Кочетко и А, А, Цветков И, Лобаче Центринст альный научно-иссттдательский т итут механизации и энергетики леси ковское ордена Ленина и ордена Т высшее техническое училише им, проектно-конструктои промышпенностудового КрасногоН, Э. Баумана рский(54) СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ. МАНИПУЛЯТОРОМ Однако для этой системы характограниченная область применениянадежность, обусловленные возможрезкого падения давления питаниярегрузки источника питания по сумпотребляемому расходу при одноврработе нескольких приводов. Это вфункциональный отказ системы привтребует от оператора большой ости внимания, что, в свою очередь,производительность труда,низкая н остьюиз-за пе,но зоп ому меннойзываетодов,рожност еньшает о органа по высот низм установки реж датчик угпар ускнитВ этой системе д поочередно подключа к другому механизм водитепьность машин ль и переключа Целью изобретения области применения и сти системы,йля этого система управляюшего сигнала мой координате, датчи и последовательно сое маркого расхода рабоч сумматор и пороговое торого подключен к пе читепей управляющего которых соединен с вь выход со входом гиявляется расширение овышение надежноик угла и усилитель .ются то к одному, то что снижает произ- тв Наиболее бзобретениктрогидравжашая попоследова силитель и г ез датчик об им иэ входо мат ора 121,Изобретение относится к системам управления электрогидравпическими приводами манипулятора и может быть использована манипуляторах лесосечных машин, груодъемных устройств, экскаваторов и т. и,Известна система управления электро- гидравлическими манипуляторами, используемая в лесосечной машине дпя установки в заданное положение режущего органа и включаюшая механизм горизонтирования, меха лизким по технической сушности является система у правления лическим манипулятором, со каж дой регулируемой коор динаельно соединенные сумматор, идропривод, выход которого чератной связи соединен с одсодержит ограничитель по каждой регупируек эталонного ситнала диненные датчик сумей жидкости, второй устройство, выход ко. рвому входу - ограни- сигнала, второй вход кодом (сцпителей, а дроприводов, выходдатчика эталонного сигнала подключен ковторому входу второго сумматора,На чертеже представлена функциональная схема системы управления электрогидравлическим манипулятором,5Система содержит приводы 1-3 и командное устройство 4 управления системой этихприводов, Каждый следующий привод состоитиз гидропривода. 5, сумматора 6, усилителя 7, ограничителя 8 управляющего сигнала ч и датчика обратной связи 9, Управляемый ограничитель 8 состоит из вспомогательного усилителя 10, охваченногоотрицательной обратной связью, в которуювходят контакты элемента включения 11 инелинейный элемент типа "зоны нечувствительности" 12 Командное устройство 4 состоит из последовательно соединенных датчике 13 суммарного расхода рабочей жидкости, второго сумматора 14 и порогового щустройстве 15 и из датчика эталонногосигнала 16, подключенного своим выходомко второму входу второго сумматора 14,Система управления алектрогидравлическим манипулятором работает следующим образом,Если сигнал О датчика 13 суммарногорасхода превысит, сигнал Я датчика эталонного сигнала 16 то на выходе второгосумматора 14 появляется положительный ЗОсигнал, срабатывает пороговое устройство15 и замыкаются контакты элементов включения 11 ограничителей 8 всех следящихприводов 1 3,Если управляющие сигналы М превышают уровни ограничения, сигналынавходах гидроприводов 5 ограничиваются.Разрешенные величины сигналов М в режиме ограничения достато",но малы,. поэтомузолотники движутся к нейтральному поло Оженпю, е расходы, потребляемые каждым изгидроприводов 5 уменьшаютсяУменьшается, следовательно, и суммарный расход,Как только 0, станет меньше Ц, контакты элементов включения размьпсаотся,и ограничители 8 работе 10 Р в режиэ усиления, не вызывая ограничения сигналовКЕсли затем рост суммарного расхода вызовет превышение разрешенного сигнале О д,вновь происходит ограничение входных сигналов гидроприводов 5.1 аким обрезом, на входах гидрогриводов5 .-.-.блюцаются колебания входных сигналовЪ",. срецние составляющие которых соответствуют допустимой величине суммарного55расходе, Колебания прекратятсякогда врезультате обработки рассогласований Еслецяшие приводы будут иметь сигналы М не вызывающие превышения разрешенногоуровня суммарного расхода, заданного сигналомЦ,п датчика аталонного сигнала 16,В этом случае контакты элементов включения постоянно разомкнуты, и приводы работают обычным образом, При другом числеприводов принцип действия устройства неменяется,Система управления электрогидравлическим манипулятором при работе от гидравлической станции питания ограниченноймощности позволяет исключить перегрузкиисточника питания и функциональные отказы системы, что повысит ее надежность,расширит область применения и увеличитее ресурс работы, Кроме того повышаетсяэффективность использования энергетических возможностей источника питания, таккак он более длительное время работает намаксимальных расходах, потребляемых системой приводов, Повышается производительность труда оператора, так как всеприводы непрерывно выполняют задачи слежения и обеспечивают более согласованноедвижение исполнительного органа манипулятора,Формула изобретенияСистема управления алектрогидравлическим манипулятором, содержащая по каждойрегулируемой коор динате последовательносоединенные сумматор и усилитель и гидропривод, выход которого через датчик обратной связи соединен с одним из входовсумматора, отличающаяся .тем,что, с цепью расширения области примененияи повышения надежности системы, она содержит ограничитель управляющего сигналапо каждой регулируемой координете, датчикэталонного сигнала и последовательно соединенные датчик суммарного расхода рабочей жидкости, второй сумматор и пороговоеустройство, выход которого подключен кпервому входу ограничителей управляющегосигнала, второй вход которых соединен свыходом усилителей, а выход - со входомгидроприводов, выход датчика ателонногосигнала подключен ко второму входу второго сумметора,Источники информации, принятые во внимание при экспертизе:1, Авторское свидетельство СССР298299, кл. А 018 3/08, 04.12. 2, Авторское свидетельство СССР446256, кл, А 01 6 23/08,05.03.73,59643 2 Составитель А. ЛашевРедактор Марховская Техред А. Богдан Корректс Гоксич Заказ в ССС лиал ППП "Патент", г. Ужгород, ул. Проектная Г9/19 Тираж 1122 ЦНИИПИ Государственного комитета по делам изобретений 11.3035, Москва, Ж, Раушская
СмотретьЗаявка
2364258, 07.05.1976
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО КОНСТРУКТОРСКИЙ ИНСТИТУТ МЕХАНИЗАЦИИ И ЭНЕРГЕТИКИ ЛЕСНОЙ ПРОМЫШЛЕННОСТИ, МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
ИЛЮХИН ЮРИЙ ВЛАДИМИРОВИЧ, КОЧЕТКОВ АЛЕКСАНДР ВИКТОРОВИЧ, ЛОБАЧЕВ ВЯЧЕСЛАВ ИВАНОВИЧ, ЦВЕТКОВ АНАТОЛИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 13/00
Метки: манипулятором, электрогидравлическим
Опубликовано: 05.03.1978
Код ссылки
<a href="https://patents.su/3-596432-sistema-upravleniya-ehlektrogidravlicheskim-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления электрогидравлическим манипулятором</a>
Датчик массового расхода

Номер патента: 1167433
Опубликовано: 15.07.1985
МПК: G01F 1/12
Метки: датчик, массового, расхода
...турбинку и упругосвязанную с ней ведущую турбинку,установленную в подшипниках .на од-ном валу, тонкостенный цилиндр, охватывающий лопастную решетку ведущей турбинки, два магнитных отметчика, укрепленных соответственнона турбинках, две индукционные катушки, установленные снаружи корпуса у турбинок, перед измерительнойтурбинкой на входе потока жидкостисоосно размещена цилиндрическаявтулка, жестко закрепленная на валу и имеющая наружный диаметр, равныйвнешнему диаметру ступицы измерительной турбинки, при этом цилиндр,связанный с ведущей турбинкой, имеет длину, большую длины обеих турбинок, и передняя торцовая поверхность цилиндра и цилиндрическойвтулки расположены в одной плоскости.з 1167433На чертеже представлена конструкция...
Электромагнитный датчик соотношения расходов

Номер патента: 444061
Опубликовано: 25.09.1974
Авторы: Кайв, Мороховский, Мясс, Фикс
МПК: G01F 5/00
Метки: датчик, расходов, соотношения, электромагнитный
...установлены измерительные электроды 4, выводы из которых цоочередно через сбегающее устройство подключены на вход устройства сравнения,Конструктивно все мерные участки объединены в одно устройство с возможностью поворотакаждого из них вокруг своей про дольной оси. При эксплуатации к мерным участкам подключают трубопроводы, по которым протекают потоки контролируемой жидкости.Датчик работает следующим образом. щ Магнитное поле, возбуждаемое магнитной системой, пронизывает все мерные участки, на электродах каждого из которых возникает разность потенциалов, равная произведению скорости жидкости, протекающей ц через этот участок, на чувствительность преобразования данного мерного участка.Последняя пропорциональна индукции магнитного поля...
Телевизионный датчик системы наблюдения за быстродвижущимися объектами

Номер патента: 1534757
Опубликовано: 07.01.1990
Автор: Грязин
МПК: H04N 7/18
Метки: быстродвижущимися, датчик, наблюдения, объектами, системы, телевизионный
...объектами работает следующим образом.Внутри поля зрения первого объектива 2 (на чертеже заштриховано) располагается визирная линия - проекция строки фотопреобразователя 5.При пересечении быстродвижущимися объектами визирной линии на выходе фотопреобразователя 5 формируется видеосигнал, который после усиления в видеоусилителе 7 поступает на вход блока 8 формирования импульсов фото- преобразователя. Назначение последнего заключается в выделении видео-. сигнала, поступающего от фотопреобразователя 5 по заданному признаку, связанному с характерным признаком подлежащего обнаружению объекта.Структура блока 8 формирования импульсов фотопреобразователя определяется критерием, по которому производится выделение заданных признаков. В...
Датчик массового расхода жидкости или газов

Номер патента: 139098
Опубликовано: 01.01.1961
Метки: газов, датчик, жидкости, массового, расхода
...давления расход газа через дроссель 4 приводит к возникновению потока газа через дроссель 13. По величине давления в междроссельной камере 14, образованной дросселем 13, и соплом 10, определяют расход газа через дроссель 4.При расходе газа через дроссель 4, пропорциональном расходу через шайбу 7, давление на выходе 11 будет пропорционально массовому расходу газа или жидкости, протекающим по трубопроводу. Температурная компенсация обеспечена применением термостата, не изображенного на чертеже, служащего для поддержания постоянной температуры потока, поступающего через следящее сопло в проточную камеру с линейным дросселем. Упрощение системы термокомпенсации может139098 быть достигнуто выполнением корпуса и сопла линейного дросселя...
Датчик массового расхода диэлектрическойжидкости

Номер патента: 292068
Опубликовано: 01.01.1971
Авторы: Борисова, Бударева, Моносов, Рский
МПК: B64D 37/16, G01F 3/00
Метки: датчик, диэлектрическойжидкости, массового, расхода
...с орциональный массовому ез датчик е, и преторичное ропорциоеменно со рический трической и,т. е.ееэти сигнимается расходу. редмет изобретени Датчик мас О жидкости, скрыльчатку и чаюи 1 ийся тек сти измерения конструкции д 5 выполнен в ви да диэлектрической струевыпрямитель, ее устройство, отлиповышения точноасхода и упрощения т струевыпрямитель того конденсатора. сового расхоодержащнйпреобразующ, что, с цельюмассового ратчика, в невде пластннча едлагаемыи датДатчи пластинчмассовогоый стр расхода вклю выпрямительт в себ спирал Изобретение относится к области приборостроения и может быть использовано для измерения расхода диэлектрической жидкости, например топлива, в двигателях летательных аппаратов.Известны массовые расходомеры,...
Предыдущий патент: Фрикционный ключ
Следующий патент: Устройство для мерной резки и укладки на подложку легкодеформируемых изделий
Случайный патент: Устройство для ультразвуковой локации головного мозга