Способ определения параметров движения изображения со случайным распределением яркостей
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
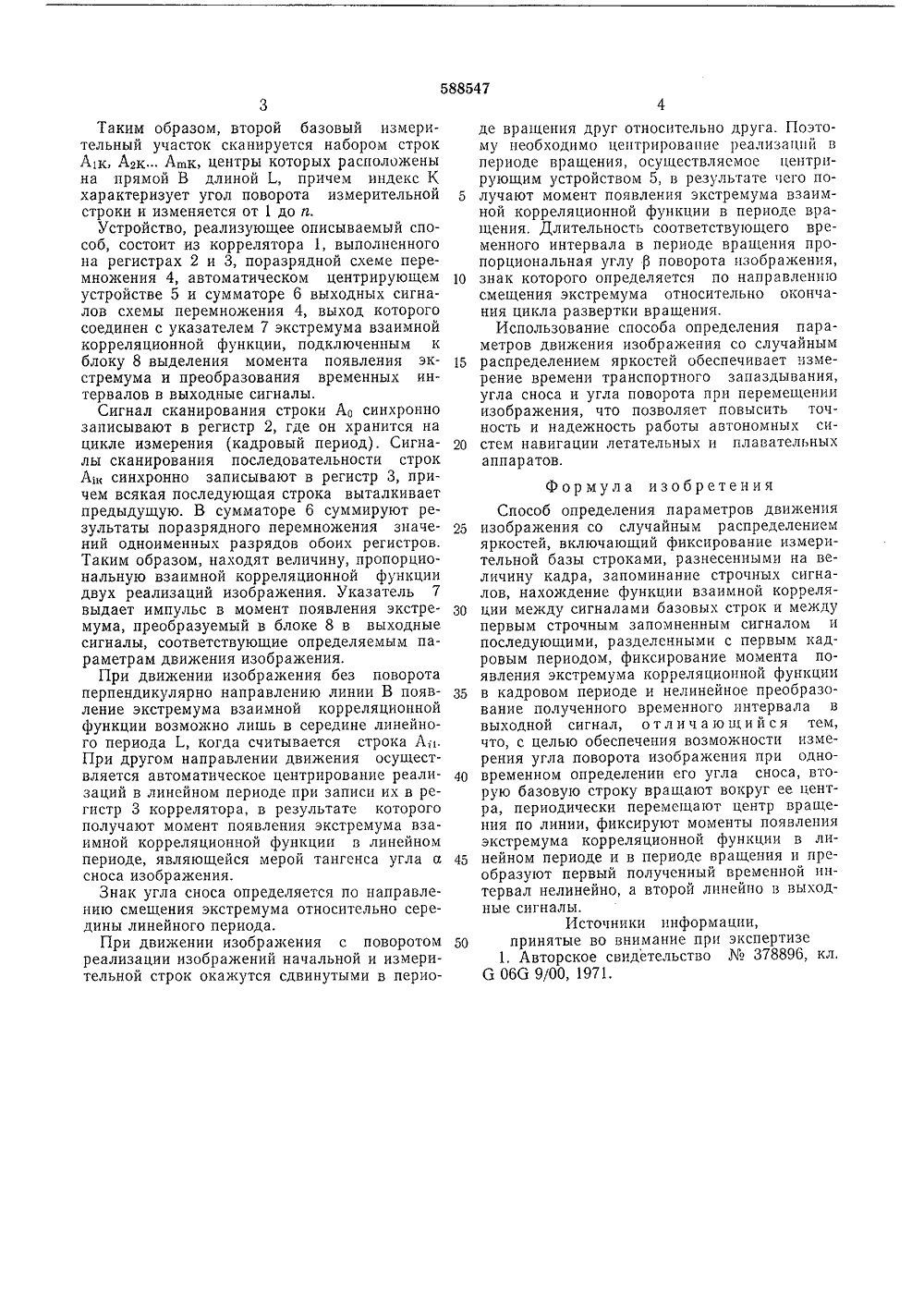
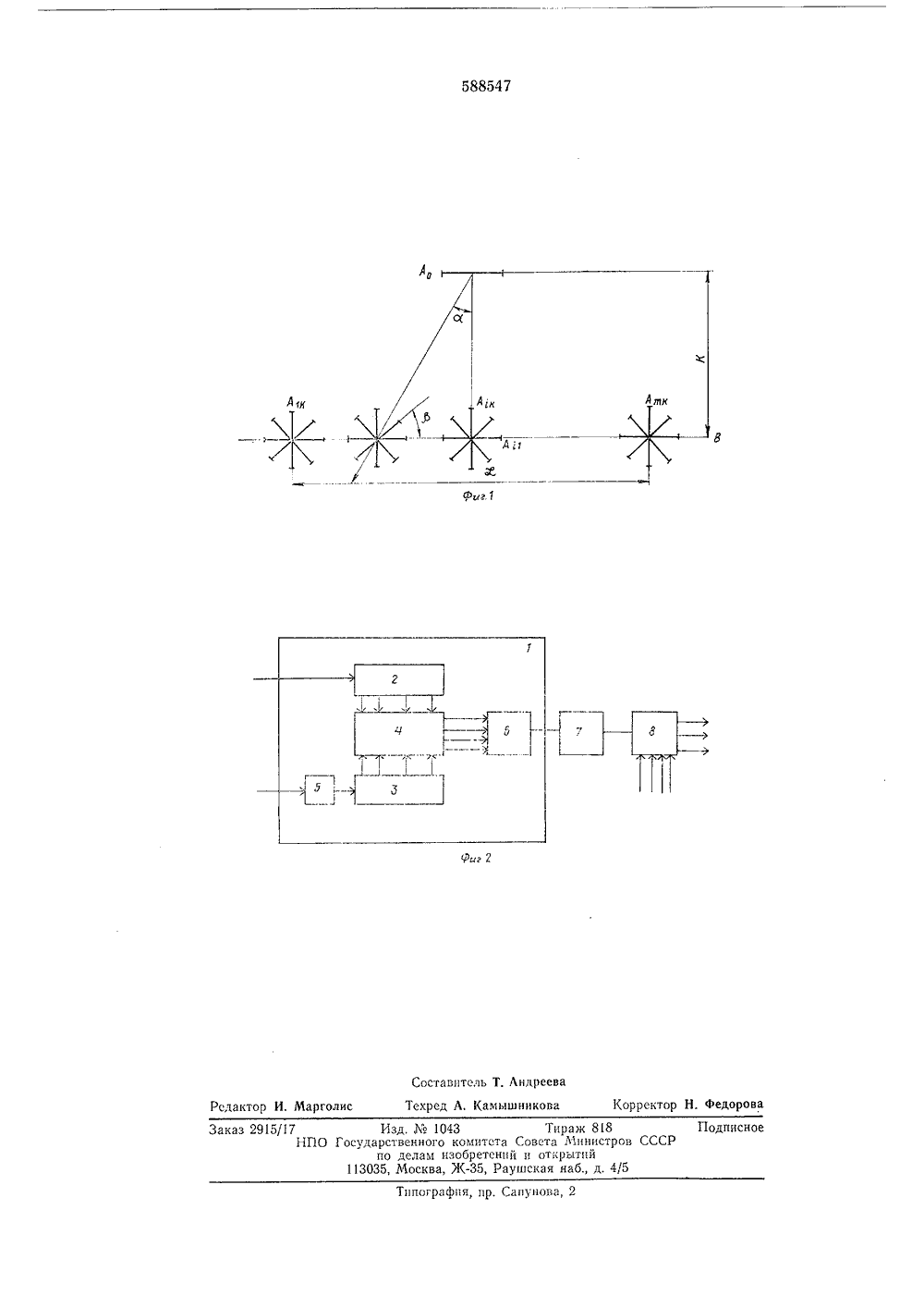
(22) Заявлено 21.05,76 (21) 2367222/18-23 51) М, Кл. б 066 9/00 аявкис присоединением осудерственный комитет овете Министров СССР(43) Опубликовано 15,01,78 Бюллетень2 ло лелем изобрете и открытий 45) Дата опубликова гя описан 01.02.(8(72) Авторы изобретения Н. И. Назаров и В. В. Сбродов шевский политехнический институт им. В. В, Куйбышева(54) С ПО ИЗОБРА ОПРЕДЕЛЕНИЯ ПАРАМИЯ СО СЛУЧАЙНЪМЯРКОСТЕЙ РОВ ДВИЖЕНИЯ СП РЕДЕЛ ЕН И ЕМ На фиг. 1 покадвижущегося изобсхема устройствемый способ.Изображение ской Ао и измеритещейся вокруг своянной скоростьюпо прямой В, отстна кадровое расст ана картина ражения; на реализуюканирования тг. 2 - блокго описываканируется нач льной строкой го центра, кото периодически п оящей от начал ояние К. альнои стро- А;, вращаюрый с постоеремещается ьной строки Изобретение относится к области вычислительной техники, применяемой для измерения параметров движения, и может быть использовано при создании автономных систем навигации летательных и плавательных аппаратов относительно подстилающей поверхности или неподвижной среды, устройств для бесконтактного измерения параметров движущихся сред,Известен способ измерения параметров движения изображения со случайным распределением яркостей, заключающийся в фиксировании измерительной базы строками, разнесенными на величину кадра, запоминании строчных сигналов, нахождении функции взаимной корреляции между сигналами базовых строк и между первым запомненным строчным сигналом и последующими, разделенными с первым кадровым периодом, фиксировании момента появления экстремума корреляционной функции в кадровом периоде, сдвиге второго строчного сигнала на величину интервала задержки экстремума корреляционной функции в кадровом периоде, фиксировании момента появления экстремума корреляционной функции в строчном периоде и нелинейном преобразовании интервалов задержки в выходные сигналы - скорость движения и угол сноса изображения 1. Недостатком известного способа являетсяневозможность определения угла поворотапри перемещении изображения, информацияо котором необходима для надежной и точнойработы автономных навигационных системлетательных и плавательных аппаратов,Для обеспечения возможности измеренияугла поворота изображения при одновременном определении его угла сноса предлага 1 О емым способом вторую базовую строку вращают вокруг ее центра, периодически перемещают центр вращения по линии, фиксируютмоменты появления экстремума корреляционной функции в линейном периоде и в периоде15 вращения и преобразуют первый полученныйвременной интервал нелинейно, а второй линейно в выходные сигналы - угол сноса иугол поворота изображения,Таким образом, второй базовый измерительный участок сканируется набором строк Ак, Ак". Ак, центры которых расположены на прямой В длиной 1., причем индекс К характеризует угол поворота измерительной строки и изменяется от 1 до и.Устройство, реализующее описываемый способ, состоит из коррелятора 1, выполненного на регистрах 2 и 3, поразрядной схеме перемножения 4, автоматическом центрирующем устройстве 5 и сумматоре б выходных сигналов схемы перемножения 4, выход которого соединен с указателем 7 экстремума взаимной корреляционной функции, подключенным к блоку 8 выделения момента появления экстремума и преобразования временных интервалов в выходные сигналы.Сигнал сканирования строки А, синхронно записывают в регистр 2, где он хранится на цикле измерения (кадровый период). Сигналы сканирования последовательности строк А;, синхронно записывают в регистр 3, причем всякая последующая строка выталкивает предыдущую. В сумматоре б суммируют результаты поразрядного перемножения значений одноименных разрядов обоих регистров. Таким образом, находят величину, пропорциональную взаимной корреляционной функции двух реализаций изображения. Указатель 7 выдает импульс в момент появления экстремума, преобразуемый в блоке 8 в выходные сигналы, соответствующие определяемым параметрам движения изображения.При движении изображения без поворота перпендикулярно направлению линии В появление экстремума взаимной корреляционной функции возможно лишь в середине линейного периода Е, когда считывается строка А,ч. При другом направлении движения осуществляется автоматическое центрирование реализаций в линейном периоде при записи их в регистр 3 коррелятора, в результате которого получают момент появления экстремума взаимной корреляционной функции в линейном периоде, являющейся мерой тангенса угла а сноса изображения.Знак угла сноса определяется по направлению смещения экстремума относительно середины линейного периода.При движении изображения с поворотом реализации изображений начальной и измерительной строк окажутся сдвинутыми в перио 5 10 15 20 25 30 35 40 45 50 де вращения друг относительно друга. Поэтому необходимо центрирование реализаций впериоде вращения, осуществляемое центрирующим устройством 5, в результате чего получают момент появления экстремума взаимной корреляционной функции в периоде вращения, Длительность соответствующего временного интервала в периоде вращения пропорциональная углу р поворота изображения,знак которого определяется по направлениюсмещения экстремума относительно окончания цикла развертки вращения.Использование способа определения параметров движения изображения со случайнымраспределением яркостей обеспечивает измерение времени транспортного запаздывания,угла сноса и угла поворота при перемещенииизображения, что позволяет повысить точность и надежность работы автономных систем навигации летательных и плавательныхаппаратов.Формула изобретенияСпособ определения параметров движенияизображения со случайным распределениемяркостей, включающий фиксирование измерительной базы строками, разнесенными на величину кадра, запоминание строчных сигналов, нахождение функции взаимной корреляции между сигналами базовых строк и междупервым строчным запомненным сигналом ипоследующими, разделенными с первым кадровым периодом, фиксирование момента появления экстремума корреляционной функциив кадровом периоде и нелинейное преобразование полученного временного интервала ввыходной сигнал, отл и ч а ю щи й ся тем,что, с целью обеспечения возможности измерения угла поворота изображения при одновременном определении его угла сноса, вторую базовую строку вращают вокруг ее центра, периодически перемещают центр вращения по линии, фиксируют моменты появленияэкстремума корреляционной функции в линейном периоде и в периоде вращения и преобразуют первый полученный временной интервал нелинейно, а второй линейно в выходные сигналы.Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство Ко 37889 б, кл.6 066 9/00, 1971,ген каз 2915/17 Тирагк 818овста Министров Си открытийшская наб., д. 4/5 Изд, М 1043 Государственного комитета по делам изобретений 113035, Москва, Ж, Рау
СмотретьЗаявка
2367222, 21.05.1976
КУЙБЫШЕВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
НАЗАРОВ НИКОЛАЙ ИВАНОВИЧ, СБРОДОВ ВЛАДИМИР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G06G 9/00
Метки: движения, изображения, параметров, распределением, случайным, яркостей
Опубликовано: 15.01.1978
Код ссылки
<a href="https://patents.su/3-588547-sposob-opredeleniya-parametrov-dvizheniya-izobrazheniya-so-sluchajjnym-raspredeleniem-yarkostejj.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения параметров движения изображения со случайным распределением яркостей</a>
Устройство для контроля угла и скорости поворота вала

Номер патента: 236103
Опубликовано: 01.01.1969
Авторы: Гульев, Институт, Карнаухов, Колесник, Сахновска, Сизенко, Соболев
МПК: G01P 3/44
Метки: вала, поворота, скорости, угла
...б подключен на вход блока управления 7 с тремя выходами. Первый выхсд подключен на вход шагового привода 8,кинематически связанного с валом 5, второй - на вход блока 9 для счета импульсов и третий - на вход датчика (блока) 10 фактиче. ской скорости в виде дифференцирующего звена йС. Выход блока 9 связан со входом задатчика угла 11, а выход блока 10 - с задатчиком скорости 12. Выходы задатчиков подключены на вход привода 13, кинематпчески связанного с валом 1. При повороте ьала 1 на угол и на тот ке у 1 ол повернется диск 3, в результате чсго в блок управления 7 от датчика б поступят импульсы,которые приведут в действие шаговый привод 8, блок 11 9 и 10. Привод 8 будет воздействовать на вал 5 с целью синхронизации его вращения с...
Устройство для вычисления корреляционной функции

Номер патента: 1352501
Опубликовано: 15.11.1987
Авторы: Артамонов, Городничев, Одинцов, Сапрыкин, Смирнов
МПК: G06F 17/15
Метки: вычисления, корреляционной, функции
...3 заранее (блок 3)аКйкУ (К) = У(К) соя --- 1 эмап - -1И И 1(19) И35 где К = 0,1,2; ( --- 1) Получение взаимных спектров В К), Я (К) путем комплексного перемнокч 1жения спектров по алгоритму (13): Вкк (К) = Х(К)(К) 8 (к) = х(к) (к) 45 И где К = 0,1,2 --- 1 (блоки 4 и 5). Вычисление смеси спектров Яку (К) и Бку, (К) по алгоритму (15) (работа 50 блока 6 смешивания спектров):К(к) = П (К) - Ч(К);К(И-К) = И, (К) + Чу (К),(21) Х21 считая К=О,где К = 0,1,2,ИИ-Кг для Вычисление по формуле (17) прямого 10 преобразования Фурье от спектра С (К)= =1(К) + 1 М(К) ( работа блока 7, на выходах которого вырабатывается комплексное значение Р Ь)ху Объединение вычисленных значений корреляционных функций С (с) иС (Т) в единый информационный массив С,(щ,...
Устройство для определения взаимной корреляционной функции

Номер патента: 1427383
Опубликовано: 30.09.1988
Автор: Обод
МПК: G06F 17/15
Метки: взаимной, корреляционной, функции
...Генератор 37 выдает на,своем выходе последовательность импульсов, которые проходят через элемент И 33 на входы элементов ИЛИ 23 и 30 и в дальнейшем на счетные входы счетчиков 24 и 31. Таким образом счетчики 24 и 31 начинают выдавать постоянно возрастающий код адреса блоков 38 и 28, 35 которые работают в этом случае на считьвание информации. Так как в первом случае счетчики 24 и 31 находились одинаково в нулевом состоянии, то с блоков 38 и 28 начинается счи тывание одноименных отсчетов входных сигналов, Эти отсчеты поступают с выходов блоков 38 и 28 на перемножитель 25, где перемножаются и поступают на накопитель, где производится накоп ление отсчетов ординаты взаимной кор, реляционной функции. По заднему фронту импульса с...
Способ контроля преобразователей угла поворота вала в код и устройство для его осуществления

Номер патента: 1656681
Опубликовано: 15.06.1991
Автор: Иванов
МПК: H03M 1/10
Метки: вала, код, поворота, преобразователей, угла
...представляют собой последовательность магнитных меток практически с теми же фазами, что и у сигналов контролируемого преобразователя,Сумма фаз сигналов, отражающих погрешность преобразователя, снятых на уг 360 ловых расстояниях друг от друга - , где п 1 - целое число, близкое к фазе сигнала с нулевой фазовой погрешностью, т,е, близка к фазе сигналов преобразователя, не имеющего фазовой погрешности,Таким образом, при считывании меток с магнитного носителя 8, например, одновременно гп-головками, можем получить сигналы, сдвинутые по фазе относительно фазы некоторого сигнала с нулевой фазой, как это показано на фиг.2 в, г, д, е; п 1 = 4,Суммируя эти сигналы, например, с помощью блока 16, можно получить сигналы, фазы которых будут...
Устройство для нахождения экстремума аддитивной функции многих переменных

Номер патента: 1765830
Опубликовано: 30.09.1992
Авторы: Зимин, Зубов, Шарашкин
МПК: G06F 15/31
Метки: аддитивной, многих, нахождения, переменных, функции, экстремума
...анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков; триггер, группа ключей, две группы сумматоров, две группы блоков вычисления значения функции, группа сумматоров-вычитателей, сумматор-вычитатель, блок задания приращения аргументов, блок задания ограничения, блок деления, блок задания количества аргументов и их связи с остальными элементами схемы.Таким образом, заявляемое устройство соответствует критерию изобретения "новизна".Сравнение заявляемого решения с другими техническими решениями показывает, что данные блоки известны 1,2,3.Однако при их введении в указанной связи с остальными элементами схемы в заявляемое устройство для нахождения экстремума аддитивной функции...
Предыдущий патент: Устройство для моделирования колебаний момента сопротивления гребного винта
Следующий патент: Оптическое устройство для умножения матриц
Случайный патент: Метиленбис ( -оксиалкил) фосфиновые кислоты