Система автоматического управления режимом работы горной машины
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
О П И С А Н И Е 562654ИЗОБРЕТЕН ИЯ Сома Советских Социалистических Республик(51) М.Кл.- Е 21 С 35/24 и за присоединен Государственный комитет овета Министров СССР(45) Дата опубликования описания 23.08.77 22.232.7 ДК по делам изобретени и открытийУПРАВЛЕНАШИНЫ 54) СИСТЕМА АВТОМАТИЧЕСКО РЕЖИМОМ РАБОТЫ ГОРйО ся к горной промыш нно к системам автрежимами работ олин вход начальных метра, а сравнения, амплитудно раполятор, тель начал параметра тимизацпц,На черте мы автомат боты горной которого соединен с цз значений оптцмцзирус другой - с выходом к входам которого по -временной сцнхронцзат причем экстраполятор ьных значений оптцмц соединены с выходом,об верителем ого параэлемента включены р п экст 1 цзмеризцр)емого ъекта опражсна блок-схс: а сист- управления режимом рас изоо цческого маш,цнь Изобретение относитленности, преимушестве оматического управления ы горных машин.Известны системы автоматического управления режимом работы горной машины, содержащие объект управления, электронный блок и схемы сравнения 1. Такие системы не учитывают изменений параметров объекта управления и поэтому не могут существенно улучшить динамические характеристики машин,Известна система автоматического управления режимом работы горной машины, содержащая объект оптимизации, эталонную модель, вычислительный блок ц элемент сравнения 12,Недостаток данной системы состоит в том, что при изменениях параметров объекта в должной мере не обеспечивается инвариант- ность динамических свойств системы относительно изменений указанных параметров.Цель изобретения - улучшение динамических характеристик машины,Для этого предлагаемая система снабжена измерителем начальных значений оптимизируемого параметра, например нагрузки, экстраполятором и амплитудно-временным синхронизатором, подключенным к выходу вычислительного блока с эталонной моделью,Система имеет объект оптимизации 1, из меритель 2 начальных значений оптимизируемого параметра, вычислительный блок 3 с эталонной моделью, экстраполятор 4, элемент сравнения 5 п амплитудно-временной синхронизатор б. Прц этом выход объекта оптцмц О зацпи 1 соединен через измеритель 2 начальных значений оптимизируемого параметра с вычислительным блоком 3 и с экстраполятором 4, вход первого цз которь 1 х соединен также с выходом элемента сравнения 5. Олин вход элемента сравнения 5 соединен с выходом экстраполятора 4, а другой - через амплитудно-временной синхронизатор б с первым выходом вычислительного блока 3, второй выхол,которого воздействует на объект ЗО оптимизации 1.Выходом объекта оптимизации 1 являетсяошибка регулирования е=/в - /,5 1 О 15 20 где /, - уставка по току электродвигателя горной машины; У - фактический ток электродвигателя горной машкины,При изменении параметров объекта 1 автоматического упр явления в системе возникает переходной процесс. Измеритель 2 выделяст только начальные значения(оошибки е и ее производных ес Полученные значения подаются на первый вход вычислительного блока 3 с эталонной моделью, которые формируют идеальную траекторию системы и приращения параметров регулятора. Значения приращений параметров регулятора с вычислительного блока 3 пода 1 отся на вход объекта оптимизации 1, После этого вычислительный блок 3 формирует координаты идеальной траектории системы для некоторого фиксированного момента времени 1, значения которых через амплитудно- временной синхронизатор б подаются на второй вход элемента сравнения б. Амплитудно- временной синхронизатор согласовывает время работы вычислительного блока 3 и время протекания переходного процесса в реальной системе. Он включает элемент сравнения 5 и подает па его второй вход сформированные значения координат идеальной траектории в момент времени 1 - б, где б - шаг экстраполятора 4,25 30 35 40 45 50 Первый вход элемента сравнения 5 соединен с выхсдом экстраполятора 4, вход которого соединен с выходом объекта оптимизации. Шаг экстраполятора (о) подбирается с учетом быстродействия вычислительного блока 3, а число шагов (число точек экстраполирования) выбирается таким, чтобы предсказанная с заданной точностью координата реального переходного процесса, соответствующая моменту времени 1, появилась на выходе экстраполятора в момент времени 1 - 6. Этим создается возможность корректировать параметры регулятора точно в заданной координате траектории движения реальной системы.Если в результате сравнения реальной и идеальной траекторий движения системы в момент времени 1 окажется, что нх координаты полностью совпадают, то на выходе элемента сравнения б сигнал отсутствует и никаких корректировок параметров регулятора не производится,Если же координаты не совпали, то на выходе элемента сравнения 5 появится сигнал рассогласования, который подается на второй вход вычислительного блока 3. В вычислительном блоке 3 соответствующим образом корректируются сформированные ранее приращения параметров регулятора, Затем формируются координаты идеальной траектории с учетом этих корректировок для нового фиксированного момента времени ")1. Вся процедура сравнения и корректировки повторяется до тех пор, пока оптимизируемая система не придет в установившееся состояние. При возникновении нового возмущенного состояния системы весь процесс оптимизации повторяется аналогичным образом. Формула изобретения Источники информации, принятые во внимание при экспертизе,1. Авторское свидетельство317794, кл, Е 21 С 27/00, 1969.2. Авторское свидетельство442459, кл. 6 05 В 17/02, 1972. СССР Система автоматического управления режимом работы горной машины, содержащая объект оптимизации, эталонную модель, вычислительный блок и элемент сравнения, о т л и ч а и щ а я с я тем, что, с целью улучшения динамических характеристик машины, она снабжена измерителем начальных значений оптимизируемого параметра, например нагрузки, экстраполятором и амплитудно-временным синхронизатором, подключенным к выходу вычислительного блока с эталонной ,моделью, один вход которсго соединен с измерителем начальных значений оптимизируемого параметра, а другой - с выходом элемента сравнения, к входам которого подключены амплитудно-временной синхронизатор и экстраполятор, причем экстраполятор и измеритель начальных значений оптимизируемого параметра соединены с выходом объекта оптимизации.562654 оставитель М. СмиттенТехред М. Семенов Рсдакто ашков ПодписноССР Тираж 778Совета Министи открытийнаб., д, 45 каз 498/1155ЦНИ Тип. Харьк. фил. пред, Патент Изд.58 И Государственного комитет по делам изобретений Москва, Ж, Раушска
СмотретьЗаявка
2194681, 24.11.1975
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "АВТОМАТГОРМАШ"
ЛЕВИТАН МАРК ЕВСЕЕВИЧ, РЕЗНИКОВ ВЛАДИМИР АЛЕКСАНДРОВИЧ, ШАРАЙ ЗИНАИДА ИВАНОВНА
МПК / Метки
МПК: E21C 35/24
Метки: горной, работы, режимом
Опубликовано: 25.06.1977
Код ссылки
<a href="https://patents.su/3-562654-sistema-avtomaticheskogo-upravleniya-rezhimom-raboty-gornojj-mashiny.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления режимом работы горной машины</a>
Преобразователь амплитудных значений периодических импульсных сигналов

Номер патента: 712764
Опубликовано: 30.01.1980
Автор: Круглов
МПК: G01R 19/04
Метки: амплитудных, значений, импульсных, периодических, сигналов
...6 и 7.Если на входе пикового детектора 1 действует периодическая последовательность электрических импульсов с постоянной амплитудой, то на его выходе имеет место на пряжение постоянного тока, уровень которого пульсирует с частотой сигнала вследствие конечного значения сопротивления разрядной цепи пикового детектора 1, Это напряжение с выхода сумматора 5 поступа ет на конденсатор 3 через резистор 2, Конденсатор 3 в момент прихода очередного импульса полностью разряжается ключом 4, а затем вновь заряжается через резистор 2. 0 Если постоянная времени интегрирующе ЯС-цепи равна постоянной времени разряд712764 Составител ев д А. Камышникова Корректор Л. Орл дактор Е. Караул Изд. Мо 100 Тираж 1074 Подписноеосударственного комитета СССР...
Адаптивная система управления нестационарным линейным объектом

Номер патента: 1277067
Опубликовано: 15.12.1986
МПК: G05B 13/02
Метки: адаптивная, линейным, нестационарным, объектом
...)..рЬ, ВЕН Т, Т 6(с, С)КоэФФициенты а , Ь; в процессе эксплуатации объекта могут изменять, = йая 113-1)ся в широких пределах. При этом на номинальном (расчетном) режиме, например, при пуске системы, параметры объекта управления имеют значения а Ь,(ЕГ, и) Для обеспечения желаемых характеристик системе управ(5) 9-11 (3., з)мм Ь 0 ОЬмь 1 мг 1 м1 Ь 1, Ь мы Мг - мг-г О Ьм,1 мх.1 0 0 1,(А =(1,2 п+2),3ления необходимо, чтобы параметрыС С, С блока вычисления сигналаадаптйвного управления, представляющего собой ПИД-регулятор, описываемый уравнениеми=С Е (с) + СаЕйфСзЕ 4(г ) ф (3)были равны номинальным величийам) Смгю СмВ уравнении (2)Е = я - у,йЕ фф ЕИСМИоЕЕгде я -сигнал управления системы,у = С"11,0Ох - выхоцнойсигнал системы.Номинальные...
Устройство стабилизации системы автоматического регулирования для объектов с самовыравниванием

Номер патента: 711544
Опубликовано: 25.01.1980
МПК: G05B 23/02
Метки: объектов, самовыравниванием, системы, стабилизации
...коэффициента, управляющий входкоторого связан с выходом блока изменения структуры, и, кроме того,тем, что блок переключения коэффи711544 0 при 9 Я ) 0а1 при уЯ О,( ) и Формула изобретения 30 циента содержит масштабный блок,ключ и сумматор, первый вход которого соединен с входом, а второй входчерез ключ соединен с выходом масштабного блока, причем управляющийвход ключа, выход и первый вход сумматора соединены соответственно суправляющим входом, выходом и входомблока переключения коэффициента.На чертеже дана структурная схемасистемы.Она содержит сумматор 1, регулятор 2, сумматор 3, объект 4 регулирования, масштабные блоки 5 и б,блок 7 изменения структуры, ключи 8и 9,. блок 10 переключения коэффициента.15При подаче на вход системы...
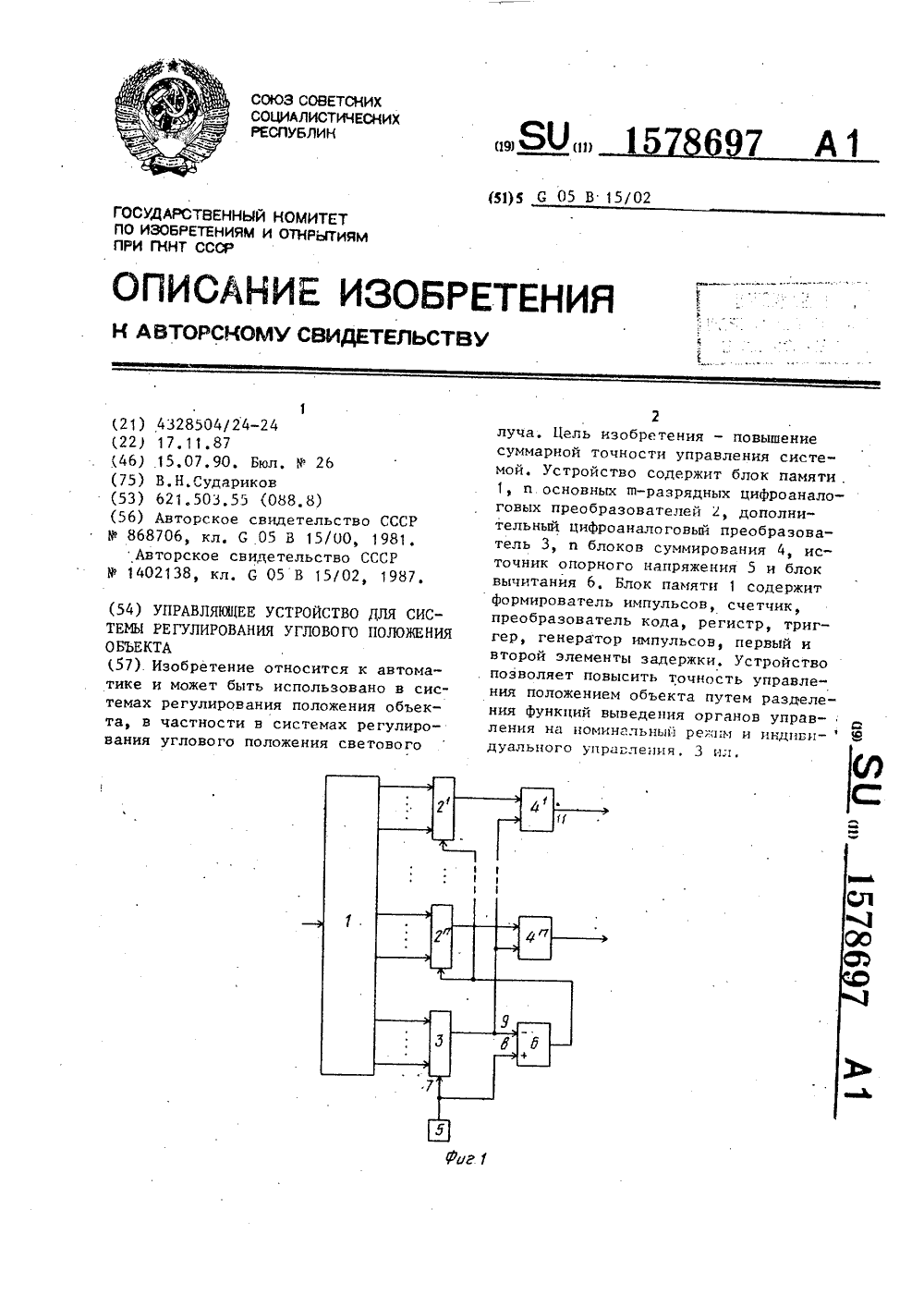
Управляющее устройство для системы регулирования углового положения объекта
Номер патента: 1578697
Опубликовано: 15.07.1990
Автор: Судариков
МПК: G05B 15/02
Метки: объекта, положения, системы, углового, управляющее
...уменьшаться (фиг,Зл),По мере дальнейшего поступленияимпульсов генератора 17 блок памяти1 работает аналогичным образом, вос-.производя на своих выходах 1 О программу эксперимента, записанную в егопостоянное запоминающее устройство 14.При достижении напряжением на выходе блока суммирования 4 предусмотренногопрограммой уровня И и фиг.Зи,Зк), соответствующего выходу внешнихрегулирующих органов из зоны нечувствительности на номинальной рабочийрежим, программное изменение числа навыходах 10 " блока памяти 1 прекращается, вследствие чего напряжениена выходе дополнительного цифроаналогового преобразователя 3 фиг,Зз) исоответственно на выходе блока вычитания 6 (фиг,Зл), стабилизируется,а дальнейшее управление внешними орга-нами...
Аналого-цифровой преобразователь амплитудных значений радиоимпульсов

Номер патента: 1317659
Опубликовано: 15.06.1987
МПК: H03M 1/44
Метки: амплитудных, аналого-цифровой, значений, радиоимпульсов
...защелкой компаратора до конца 15 импульса управления. Соответствующийкпюч 2 Размыкается, Отключая цепьсигнала От входа компаратора и ключа11 схемы формирования разности. Двоичный код О, ,О 1 . выхода шифратора 20 по шинам 8 поступает на выход преобразователя и Формирует на выходедешифратора 10 код 1101. Сигналом"0" Открывае.тся ключ 11, аналоговыйвход которого через ключ 2 подключен 2-ф к выходу предпоследнего усилителя.Остальные ключи 11 закрыты , Навыходную шину 7 поступает сигнал с(эпюры 1,2 и 2.2, Фиг,2), ЗО Если амплитуды радиоимпульсов навыходах двух усилителей превышаютпороговые уровни компараторов 3 (отрезок времени Т ), срабатывает двакомпаратора, размыкаются два послед них ключа 2, обнуляются входы срабатывающих...
Предыдущий патент: Гидродомкрат
Следующий патент: Способ определения прочности пород в скважинах
Случайный патент: Воздушная линия электропередачи