Устройство для программного управления шаговым приводом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
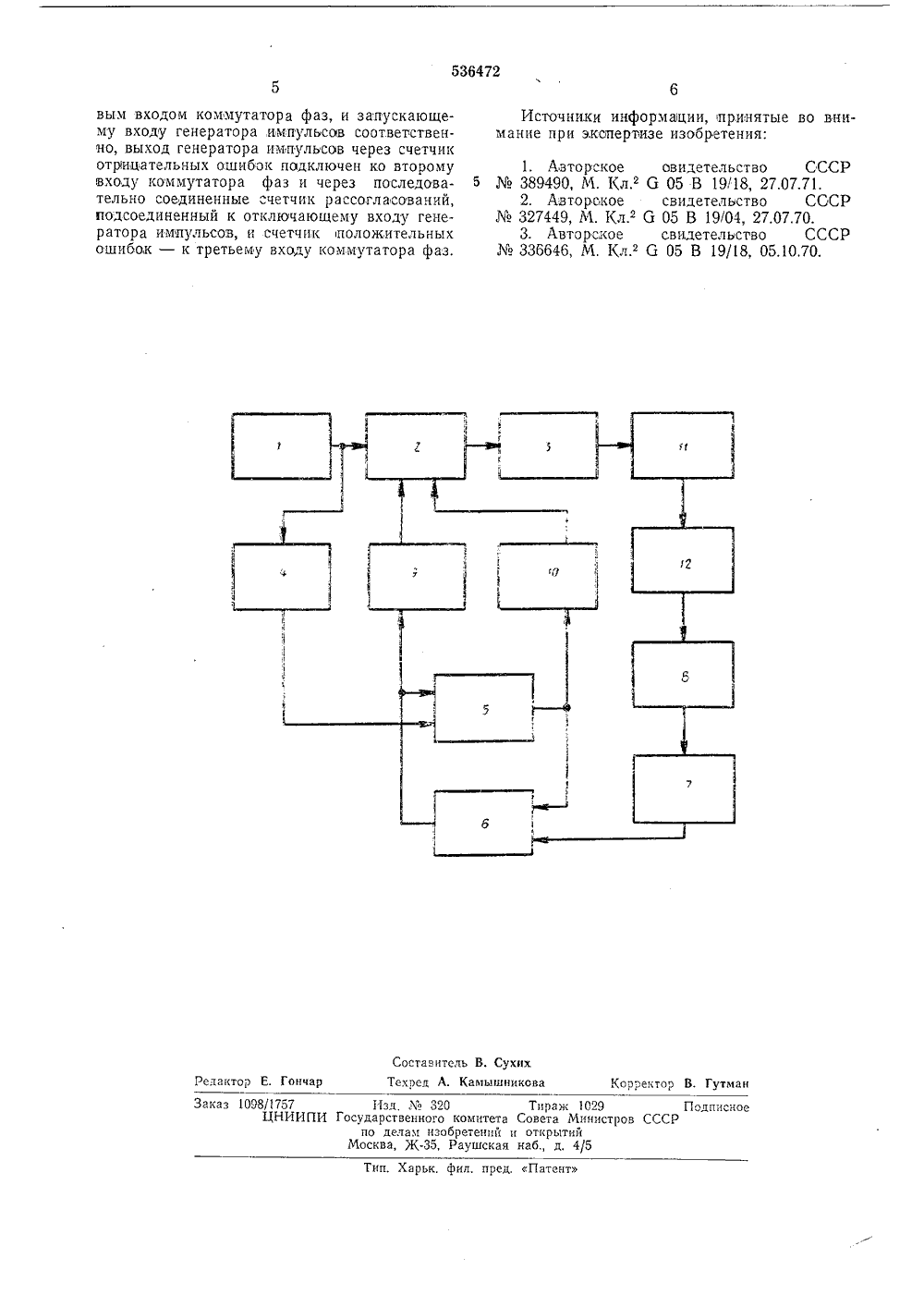
ф 1 ффнКЧ н .л , фью ОП ИСАН И Е ИЗОБРЕТЕН И Я К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ11536472 Союз Советских Социалистических Республик. овид-ву полнительное к а 19/40 М.Кл 22) Заявлено 18.08.75 (21) 2166120/24 исоединением заявк Гесударственный комитет Совета Министров СССР 3) Приорит 53) УДК 621-503.5) Заявител 54) УСТРОЙС"ВО ДЛЯ ПРОГРАММНОГОУПРАВЛЕНИЯ ШАГОВЫМ ПРИВОДОМ рограммномстанками и рограммноупх с шаговым тмное устройвляющая ин- непрерывной Известны устроиства программного управления, содержащие датчик, контролирующиц положение объекта, и блок сравнения заданногопрограммой положения с действительньм. При этом коррекция положения ооъекта производится после остановки отработки программы путем подачи на шаговый привод необходимого числа дополнительных импульсов, вырабатываемых соответтствующими вычислительными устройствами. Таким образом, предусматривается коррекция только отрицательных ошибок, т, е. когда после отработки программы, перемещение объекта це достигнет заданного положения, Однако положительная ошибка, т. е. когда объект в процессе отработки программы перемещается на расстояние больше заданного, в таких устройствах может быть компенсирована путем перемещения объекта,в обратном направлении, что в процессе отработки на станках с программным управлением недопустимо 111,и 21. Изобретецие относится к п управлению металлорежущими может быть использовано в и равляемых силовых установка приводом, содержащих програ ство, на выходе которого уира формация представлена в виде последовательности импульсов. Наиболее близким к данному изобретениютехническим решением является устройстводля программного управления шаговым приводом, содержащее блок ввода программы,коммутатор фаз, генератор .импульсов и датчик перемещений, подключенный через формирователь иипульсов ко входу счетчика рассогласования 131,В этом устройстве уменьшение ошибок пе 10 ремещений объекта, вызванных динамическими свойствами привода, производится путемснижения частоты регулируемого генератора,и только при отсутствии ошибок частота цмпульсов управления может быть увеличена.15 Это обстоятельство приводит к существенномуснижению производительности обработки цастанке. Следует отметить также, что в этомизвестном устройстве невозможно устранениеошибок, вызванных наличием зазоров в кице 20 матической паре ходовой винт в гай столастанка, так как датчнк перемещений установлен на ходовом винте и не контролирует действительное положение объекта управления,а также положительных ошибок, Эти обстоя 2 тельства существенно снижают точность устройй сто а. Цель изобретения - повышение точностиустройства путем уменьшения систематических О и случайных погрешностей, вызванных дицамнческими свойствасми привода и изменениемусилий в приводе в процессе обработки. Достигается это тем, что в устройство введены счетчики положительной и отрицательной ошибок и блок задержки, вход и выход которого подключены к выходу блока ввода программы, соединенному с первым входом ,коммутатора фаз, и запускающему входу генератора импульсов соотвесвенно. Выход генератора импульсов через счетчик отрицательных ошибок подключен ко второму входу коммутатора фаз и через паследовательно соединенные счетчик раосогласований, подсоединенный к отключающему входу генератора импульсов, и счетчвк положительных ошибок - к третьему входу коммутатора фаз. 5 1015 20 25 30 На чертеже изображена функциональная схема предлагаемого устройства. Она содержит блок ввода программы 1, коммутатор фаз 2, шатовый привод 3, блок задержки 4, генератор импульсов 6, счетчик раосогласований 6, формирователь импульсов 7, датчик перемещений 8, счетчики положительной ошибки 9 и отрицательной ошибки 10, гидроусилптель мощности 11 и объект управления 12. 35 40 45 50 55 60 65 Устройство работает следующим образом. Каждый импульс .программы, поступающий с выхода блока ввода программы 1 на вход коммутатора фаз 2, вызьювает поворот шагового привода 3 на один шаг. Шагавый привод через пидроусилитель мощности 11 перемещает объект управления 12 (стол станка) на определенное дискретное расстояние, которое измеряется датчиком 8, и на выходе формирователя 7 появляется последовательность импульсов, число которых пропорционально отношению величины дискретного, перемещения стола (шага привода) и разрешающей способности датчика,перемещений 8. Таким образом, после каждого импульса управляющей программы на выходе формирователя импульсоз 7 появляемся последовательность импульсов, которые:фиксируются в счетчике рассогласований 6, число разрядов которого определяется указанным выше отношением, Сигнал переполнения на выходе счетчика 6 появляется только при нормальной отработке шага и поступает на откл 1 ачающий,вход генератора импульсов 6, на запуокающий вход которо;о через элемент задержчси 4 поступает импульс запуск с выхода блока ввода программы 1. Время выдержки регулируется в зависимости от периода следования импульсов управляющей программы, При отоутствии импульса переполнения с выхода счетчика рассогласозаний 6 импульс с выхода блока задерж 1 си 4 запускает генератор импульсов 6, на выходе которого появляется последовательность импульсов, поступающих на второй вход счетчика,рассогласований 6. Сигнал переполнения счетчика раосогласований 6 останавлвлвает работу генератора илвпульсов 6, а число импульсов, необходимое для переполнения, фитссируется в счетчике отрицательнойошибки 10, число разрядов которого равно числу разрядов счетчика 6. Таким образом, в счетчике 10 накапливается число импульсов, пропорциональное отрицательной ошибке. Сигнал переполнения на выходе счетчика 10, соответствующий моменту достижения ошибки, равной дискретности перемещений, поступает на один из дополнительных вхадав коммутатора фаз 2 и далее отрабатььвается шаговым приводом 3, как дополнительный импульс программы.Появление двух иъвпульсав переполнения иа выходе счетчика рассогласований 6 соответствует моменту .достижения положительной ошибки, равной дискретности перемещений. Эти импульсы фиксируются в счетчике положительной оцпибки 9, выходной сигнал которого поступает на другой дополнительный вход коммутатора фаз 2, Этот сигнал запрещает прохождение очередного импульса программы через коммутатор фаз 2. Запрет отработки одного им 1 пульса исходной программы позволяет устранить положительную ошибку, равную дискретности шага, привода именно в момент накопления такой ошибки, причем для этого пе требуется изменение направленля дзижения на обратное.Предлагаемое устройство программного управления шаговым приводам позволяет уменьшить как отрицательные, так и положительные ошибки в отработке программы, без импульсно-фазового преобразования управляющей информации, до значения дискретности шага привода, что в конечном итоге суще твенно повышает точность, обработки на существующих непрецезионных станках с программным управлением, а также позволяет использовать шаговый привод при оптимальных скоростях подачи, апределяемых режимами резания, что существенно повышает производительность обработки.Технико-экономическая эффективность внедрения предлагаемой системы определяется как результат сокращения потерь от брака, снижения эксплуатационных расходов на наладку станков, повышения производительности обработки.Формула изобретенияУстройство для программного управления шаговым приводом, содержащее блок ввода программы, коммутатор фаз, генератор импульсоз и датчик перемещений, подключенный через формирователь импульсов ко входу счетчика рассогласования, о тл и ч а ю щ е е с я тем что, с целью повышения точности устройства, в него введены счетчики положительной и отрицательной, ошибок и блок задержки, вход и выход которого подключены к выходу блока ввода программы, соединенному с пер536472 Составитель В. Сухихедактор Е. Гончар Техред А. Камышииксва Коарек тман Заказ 1098/175ЦНИ Тираж 1029комитета Совета Министровретенпй и открытийРаушская наб., д, 4/5 11 зд, Мв 320 Государственного по делам изо Москва, Ж.35, ПодписноеССР Тип. Харьк. фил. пред. ; Патент вым входом коммутатора фаз, и запускающему входу генератора импульсов соответственно, выход генератора импульсов через счетчик отр 1 ицательных ошибок подключен ко второму входу коммутатора фаз и через последовательно соединенные счетчик рассогласований, подсоединенный к отключающему входу генератора импульсов, и счетчик положительных ошибок - к третьему входу коммутатора фаз. Источники информации, принятые во внимание при экспертизе изобретения: 1. Авторское свидетельство СССР5 М. 389490, М. Кл в 6 05 В 19/18, 27.07.71. 2. Ааторское свидетельство СССР Мв 327449, М. Кл6 05 В 19/04, 27.07.70. 3. Авторское свидетельство СССР Мв 33 бб 46, М, Кл.в Сз 05 В 19/18, 05.10,70.
СмотретьЗаявка
2166120, 18.08.1975
ПРЕДПРИЯТИЕ ПЯ А-3903
ПИСКЛОВ СЕРГЕЙ АЛЕКСАНДРОВИЧ, СОПИН ВЛАДИМИР ГЕОРГИЕВИЧ
МПК / Метки
МПК: G05B 19/40, G05B 19/41
Метки: приводом, программного, шаговым
Опубликовано: 25.11.1976
Код ссылки
<a href="https://patents.su/3-536472-ustrojjstvo-dlya-programmnogo-upravleniya-shagovym-privodom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления шаговым приводом</a>
Счетчик импульсов с контролем ошибок

Номер патента: 841125
Опубликовано: 23.06.1981
Авторы: Андрущенко, Бекеша, Глушков, Петренко, Сахно
МПК: H03K 29/00
Метки: импульсов, контролем, ошибок, счетчик
...ну-.левой сигнал, а на его следующем,)+1-ом,выходе - единичный сигнал.Для того, чтобы на К-выходе расширителя сигналов 5 установился единичный сигнал, на его вход нужно подать К импульсов.Дешифраторы б и 7 на и и щ выходов представляют собой прямоугольныедешифраторы, на выходах каждого изкоторых поочередно появляются сигналы.Предлагаемый счетчик работаетследующим образом.Перед началом работы основнойсчетчик 1, контролирующий счетчик 2,и расширитель сигналов 5 устанавливаются в исходное, нулевое состояние(на чертеже не показано),По шине 8 на входы основного счетчика 1 и контролирующего счетчика 2поступают импульсы счета, Заполнениесчетчиков начинается одновременно,и на входы дешифраторов б и 7 поступают одинаковые комбинации...
Счетчик импульсов с контролем ошибок

Номер патента: 356793
Опубликовано: 01.01.1972
МПК: H03K 21/40
Метки: импульсов, контролем, ошибок, счетчик
...контроля, шину 11 подачи импульсов счета и шины 12 и 13 съема сигналов переноса.Основной и разрядный счетчик 1 импульсов осуществляет счет входных сигналов, поступающих по шине 11, дополнительный пт разрядный счетчик осуществляет контрольный счет входных импульсов.Элементы ИЛИ 3, 4 и 5 служат для обеспечения сигналов переноса из младших разрядов в старшие, поступающие по шинам 12 и 13. Элемент ИЛИ б объединяет выработанные сигналы контроля, выдаваемые по шине 10 на схему фиксации, а элементы И 7, 8 формируют контрольные сигналы. Элемент 9 расширения сигнала переноса из старшего разряда контрольного счетчика предна356793 П р едм ет из о бр етен ия Составитель С, ПронинТехред Е, Ворисова Редактор Т. Морозова Корректоры; В. Петрова и Е....
Счетчик импульсов с контролем ошибок

Номер патента: 822374
Опубликовано: 15.04.1981
Авторы: Андрущенко, Бекеша, Глушков, Петренко, Сахно
МПК: H03K 21/34
Метки: импульсов, контролем, ошибок, счетчик
...8 дешифратором 4Если единичное состояние в младшемразряде Основного счетчика 1. подтвер822374 О О Исх онтроль онтроль О О О тановка к О нтроль 1 1 установка кодаконтроль О .,О установка. коконтроль О О О ановка кода О О роль О О нтрольтановка к 1 1 конт ОО 1 ее1 1 1 ановка онтрольстановка кода1, 11 а контроль имппереполнен О О Фждается, то на выходе дешифратора 4 формируется сигнал фИсправноф, который помимо своего основного назначения поступает на вход контролирующего счетчика 2 для установки в его разрядах следующего состояния.В паузе между 2-м и 1-м счетными импульсами состояния малоразрядио" го счетчика 2 с приходом тактового импульса 9 дешифруются дешифратором 5, и сигналы с его выкода устанавливают в разрядах основного...
Устройство для записи и коррекции программ

Номер патента: 1149268
Опубликовано: 07.04.1985
Авторы: Барметов, Боев, Евтеев, Колядко, Уваров
МПК: G06F 11/28
Метки: записи, коррекции, программ
...первого элемента И блока записи в постоянную память и с вторым информационным входом коммутатора блока задания режима, выход дешифратора блока записи в постоянную память соединен с вторым10 блок 5 1 постоянной памяти, выход 52 мультиплексора 42, выход 53 мультиплексора 46, выход 54 схемы сравнения, вход/выход 55 блока 51, выход 56 преобразователя 50 уровня, счетчик 57, регистры 58 и 59, схему 60 сравнения, сумматор 61, коммутаторы 62 и 63, входы 64-66 занесения информации счетчика и регистров, входы 67 и 68 коммутаторов, коммутатор 69, элемент 70 задержки, элементы И-НЕ 71 и 72, элемент 73 задержки, элемент И 74, элемент ИЛИ 75, триггер 76, переключатель 77, входы 78- 82.Блок 9 обеспечивает стирание, запись, хранение и выдачу по...
Преобразователь числа импульсов в фазу
Номер патента: 279200
Опубликовано: 01.01.1970
Автор: Галанский
МПК: G06J 3/00
...относительно выхода И, и появится сдвиг го фазе. Схема преобразования выполнена так, что при положительном знаке сдвига фазы частота сигнал:в с выхода 12 будет больше частоты выхода 13, а при отрицательном знаке - меньше. Это достигается логической схемой на входе счетчика 3, которая или суммирует импульсы с источника 11 и импульсы с источника 1 опорных сигналов при положительном знаке сдвига, или не пгопускает, т. е. вычитает импульсы с источника 1 при поступлении управляющих импульсов при отрицательном аяаке сдвига. Счетчики 2 и 3 имеют одинаковый коэффициент деления.Правильность сдвига фазы определяется контрольным устройстзом, принцип действия которого основан на сравнении фаз последовательности импульсов опорного и рабочего...