Система двухкоординатного программного управления с коррекцией программы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 451059
Автор: Рудов


Текст
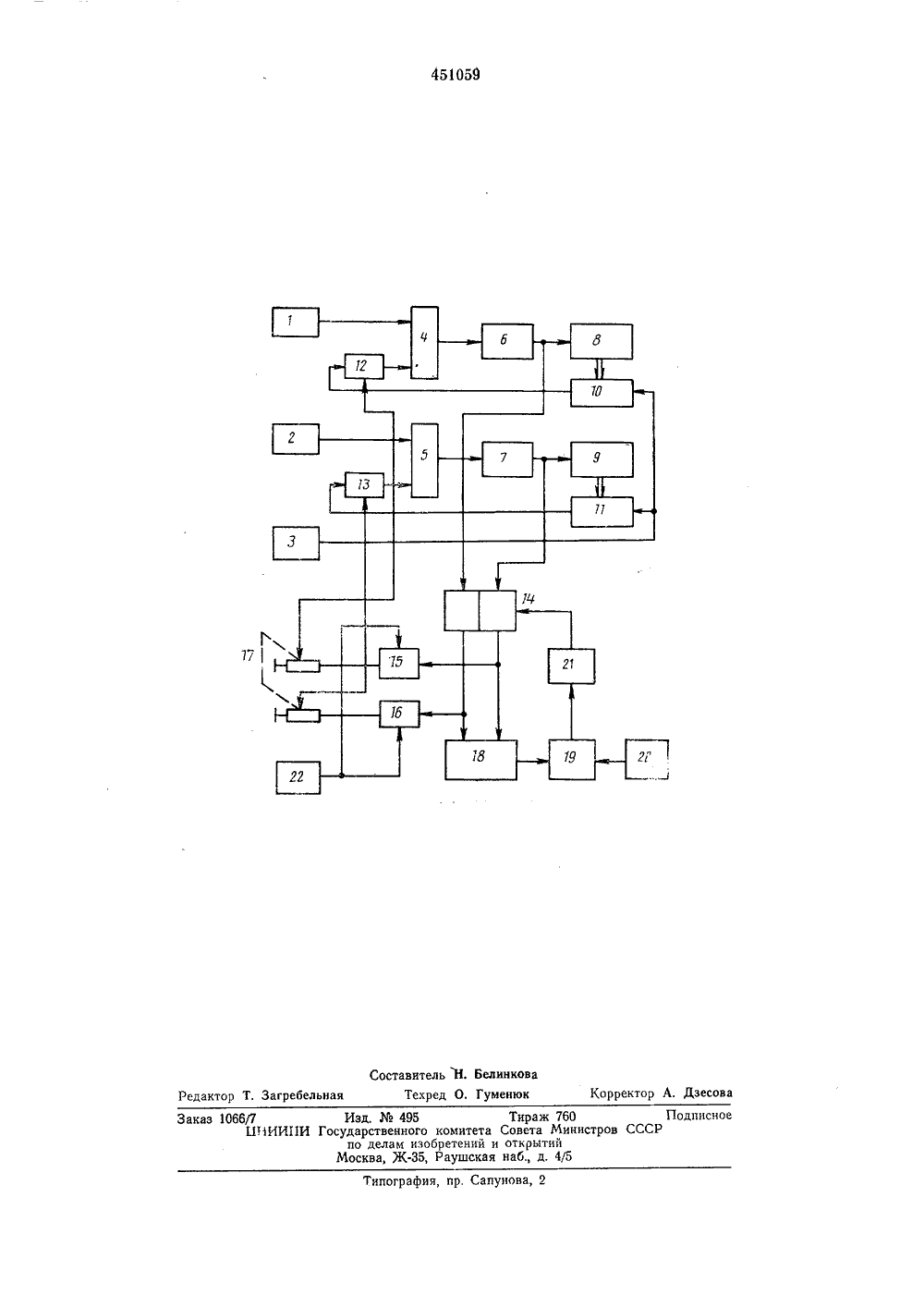
О П И С А Н И Е (11) 45 О 59ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(51) Я 6 05 Ь 19 Государственнын комитет Совета Министров СССР(53) 21-503.55088.8) по делам изобретений и открытий) Автор изобретения ПТБ А, Руд ФМ 3 3 ЙЯУЯ 3(71) Заявител 54) СИСТЕМА Д УПРАВЛЕН ХКООРДИНАТНОГО ПРОГРАММНОГО С КОРРЕКЦИЕЙ ПРОГРАММЫ Изобретение относится к области автоматики и вычислительной техники и, в частности, к системам программного управлениястанками с записью информации на магнитную ленту. 5Известны системы двухкоординатного программного управления с коррекцией программы, содержащие блок считывания технологической информации, блок считывания опорного сигнала и по каждой координате последовательно соединенные блок считывания управляющей информации, детектор отклонения,блок управления приводом, привод, датчикобратной связи, подключенный к блоку считывания опорного датчика, и блок ввода коррекции, подключенный к детектору отклонения,ельно соединенные дву асштабирования, блоки п коррекции и регулятор и подключены к блокам угой координаты. редставлена блок-схемачерез последова нальный блок м ключения знаколичины коррекци да коррекции др На чертеже п ка- ресисение трудоемко в систему введе рекции, последотчик эталонного ок обратной свясштабирования и ения, подключен по каждой коорзнаков коррексчитывания техпричем блоки упждой координате 3 Цель изобретения - снисти подготовки программы.Это достигается тем, чтоны регулятор величины кова тельно соединенные задсигнала, блок сравнения, бзи, двухканальный блок маблок геометрического сложный к блоку сравнения, идинате блоки переключениции, подключенные к блокунологической информации,равления приводами по ка темы.Система содержит блоки 1, 2, 3 считывания сигналов с магнитной ленты соответственно для координат х, у управляющей информации и опорного сигнала, детекторы 4, 5 отклонения, блоки 6, 7 управления приводом, приводы 8, 9, датчики 10, 11 обратной связи, блоки 12, 13 ввода коррекции, двухканальный блок 14 масштабирования, блоки 15, 16 переключения знаков коррекции, регулятор 17 величины коррекции, блок 18 геометрического сложения, блок 19 сравнения, задатчик 20 эталонного сигнала, блок 21 обратной связи и блок 22 считывания технологической инфор.мации.Сигнал с магнитной ленты поступает на блоки считывания 1, 2 и 3, выходные сигналы которых поступают соответственно на детекторы 4 и 5 отклонения, а опорный сигнал через датчики обратной связи 10 и 11 и блоки 12 и 13 ввода коррекции - на вторые входы детекторов 4 и 5 отклонения. При совпадении управляющих и опорных сигналов, т. е. при отсутствии перемещений по программе, сигнал с выходов детекторов отклонения равен нулю, С выходов блоков 6 и 7 управления в этом случае также нет сигналов, и приводы не перемещаются.При появлении сдвига фазы в какой-либо из координат по отношению к опорному сигналу на выходе детектора отклонения соответствующей координаты появляется сигнал, пропорциональный этому сдвигу фаз, и блок управления соответствующей координаты начинает перемещать привод, связанный с датчиком, в таком направлении, чтобы управляющий и опорный сигналы на входах детектора отклонения были равны.При наличии перемещений по координатам сигналы с блоков 6 и 7 управления поступают также и на входы двухканального блока 14 масштабирования, с выходов которого они поступают на входы блока 18 геометрического сложения, направляющего сигнал на блок 19 сравнения, где производятся его сравнения с сигналом эталонного задатчика 20. Сигнал отклонения с выхода блока 19 сравнения через блок 21 обратной связи устанавливает выходную величину двухканального блока 14 масштабирования, равную эталонному сигналу. Величина эталонного сигнала выбирается такой, чтобы обеспечить максимальную величину коррекции,С выходов двухканального блока 14 масштабирования сигналы поступают через блоки 15 и 16 переключения знака коррекции, ручной регулятор 17 величины коррекции на блоки 12 и 13 ввода коррекции, причем сигнал с одной координаты поступает на блокввода коррекции другой координаты.5 Предмет изобретенияСистема двухкоординатного программногоуправления с коррекцией программы, содержащая блок считывания технологической ин формации, блок считывания опорного сигнала и по каждой координате последовательно соединенные блок считывания управляющей информации, детектор отклонения, блок управления приводом, привод, датчик обратной 15 связи, подключенный к блоку считыванияопорного сигнала, и блок ввода коррекции, подключенный к детектору отклонения, о т л ич а ю щ а я с я тем, что, с целью снижения трудоемкости подготовки программы, в сис тему введены регулятор величины коррекции,последовательно соединенные задатчик эталонного сигнала, блок сравнения, блок обратной связи, двухканальный блок масштабирования и блок геометрического сложения, под ключенный к блоку сравнения, и по каждойкоординате блоки переключения знаков коррекции, подключенные к блоку считывания технологической информации, причем блоки управления приводами по каждой координате 30 через последовательно соединенные двухканальный блок масштабирования, блоки переключения знаков коррекции и регулятор величины коррекции подключены к блокам ввода коррекции другой координаты.Подписи оров СССР 66/7 Ш 4 ИИПИ аказ Типография, пр. Сапунова, 2 Изд.495 осударственного комитета по делам изобретений и Москва, Ж, Раушская
СмотретьЗаявка
1826168, 08.09.1972
ПРЕДПРИЯТИЕ ПЯ М-5344
РУДОВ ВЛАДИМИР АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 19/16
Метки: двухкоординатного, коррекцией, программного, программы
Опубликовано: 25.11.1974
Код ссылки
<a href="https://patents.su/3-451059-sistema-dvukhkoordinatnogo-programmnogo-upravleniya-s-korrekciejj-programmy.html" target="_blank" rel="follow" title="База патентов СССР">Система двухкоординатного программного управления с коррекцией программы</a>
Устройство для автоматической коррекции статической характеристики измерительного преобразователя, охваченного обратной связью

Номер патента: 712788
Опубликовано: 30.01.1980
Автор: Губанова
МПК: G01R 35/00
Метки: автоматической, измерительного, коррекции, обратной, охваченного, преобразователя, связью, статической, характеристики
...которого установлен третий выкл:очатсль.На чертеже показана функциональн 30 схема предложенного устройства для авмапиеской соррссции статической характеристики измерительного преобразователя, охваченного обратной связью.Устройство содержит однополюсный выключатель 1, измерительный прсобразователь 2 с прямой цепью 3, элементом обратпой связи 4 и вычитающими блоками 5, 6,двухполюсный выключатель 7, запоминающий блок 8, вычнтающий блок 9 и однопол осный выключатель 10, 101 абота устройства происходит следующим образом,Входной сигнал Х, через замкнутый контакт выключателя 1 подается на вход измерительного преобразователя 2. На выходс преобразователя 2 получается сигнал Х,значение которого определяется какКХа - Х 41. К 3, 20где К -...
Способ передачи и приема дискретной информации для систем связи с решающей обратной связью

Номер патента: 650243
Опубликовано: 28.02.1979
Авторы: Афанасьев, Замрий, Захаров, Рожков, Фролов
МПК: H04L 1/10
Метки: дискретной, информации, обратной, передачи, приема, решающей, связи, связью, систем
...комбинаций через синхронный распределитель 15, начиная с комбинации, имеющей первый условный номер. Затем передается комбинация, имеющая второй условный номер, и т. д.Синхронный распределитель 15 работает синхронно и синфазно с синхронным распределителем 17.Каждая й-элементная комбинация, поступающая с выхода синхронного распределителя 15, через элемент ИЛИ 10 записывается в накопитель 11 и одновременно кодируется с помощью кодирующего блока 1, после чего полученная Й-элементная комбинация подается на вход дискретного канала связи 2, с выхода которого информационные элементы комбинации записываются в накопитель 3. Одновременно все Й элементов комбинации поступают в блок 4 обнаружения ошибок, где по каждой комбинации принимается...
Устройство приема-передачи дискретной информации с решающей обратной связью

Номер патента: 930716
Опубликовано: 23.05.1982
Авторы: Карпов, Коричнев, Пылькин
МПК: H03M 13/51, H04L 1/16
Метки: дискретной, информации, обратной, приема-передачи, решающей, связью
...комбинации по сигналу ".Подтверждение" блок 5 стирает информацию в этом регистре,.что свидетельСтвует о безошибочном приеме первой комбинации, и осуществляет пера20 Формула изобретения 5 93071дачу следующей комбинации из буферного накопителя 10;Аналогично сигнал 1-й комбинациизаставляет блок 5 стирать информациюв Ь-м регистре Р -разрядного накопителя 3 при правильном приеме. Приобнаружении ошибок в принятой комбинации. и-й регистр не обнуляется, аинформация с этого регистра по сигналу с блока 5 выдается на повторную 1 опередачу через кодер 2 с одновременной записью:в первый регистр и-разрядного накопителя 3.Порядок записи очередной комбинации из буферного накопителя 10 в 15регистры блока 8 определяет блок 5в соответствии с сигналами на...
Система передачи информации с решающей обратной связью

Номер патента: 1167746
Опубликовано: 15.07.1985
Авторы: Житков, Кон, Лицын, Шеховцов
МПК: H04L 1/16
Метки: информации, обратной, передачи, решающей, связью
...алгоритму, причем результат операции "Ь запоминается. Сформированная кодовая комбинация по каналусвязи поступает на приемную сторону,где проверяется на наличие ошибок.Если ошибки отсутствуют, то информационная часть выдается получателю,,на передающую часть посылается сигналобратной связи, обеспечивающий передачу следующих 1 символов от источника. Вектор, представляющий собойобразующий смежного класса, стирается. Если принятый вектор содержитобнаруживаемую ошибку, то принятаякомбинация запоминается и сигналобратной связи, посланный на передаю 25щую сторону, обеспечивает вьдачу длякодирования следующих Ь информационных символов от источника. Вектор,полученный в результате их кодирования в коде В, суммируется с хранимымвектором...
Полосовой цепочечный фильтр с многопетлевой частотно независимой обратной связью

Номер патента: 660198
Опубликовано: 30.04.1979
Автор: Михайлов
МПК: H03H 7/02
Метки: многопетлевой, независимой, обратной, полосовой, связью, фильтр, цепочечный, частотно
...и частот полюсов, на входе фильтра, а также между звеньями фильтра включены вычитающие блоки, вторые входы которых соединены с выходом фильтра,На чертеже приведена функционал яская схема предложенного ф тсвязью содержит последовательно соединенные звенья 1 с передаточными функциями второго порядка и одинаковыми значениями добротностей и частот полюсов, на входе фильтра, а также между звеньями 1 фильтра включены вычитающие блоки 2, вторые входы которых соединены с выходом фильтра.Фильтр работает следующим образом.Сигнал обратной связи с выхода полосового цепочного фильтра с многопетлевой частотно-независимой обратной связью подается на вторые входы вычитающих блоков 2. Формирование заданной амплитудно- частотной характеристики...
Предыдущий патент: Устройство для автоматического останова в заданном положении рабочих органов машин
Следующий патент: Трехмерный интерполятор
Случайный патент: Способ лабораторной диагностики чумы у свиней, собак и пушных зверей