Устройство для программного регулирования технологических параметров
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
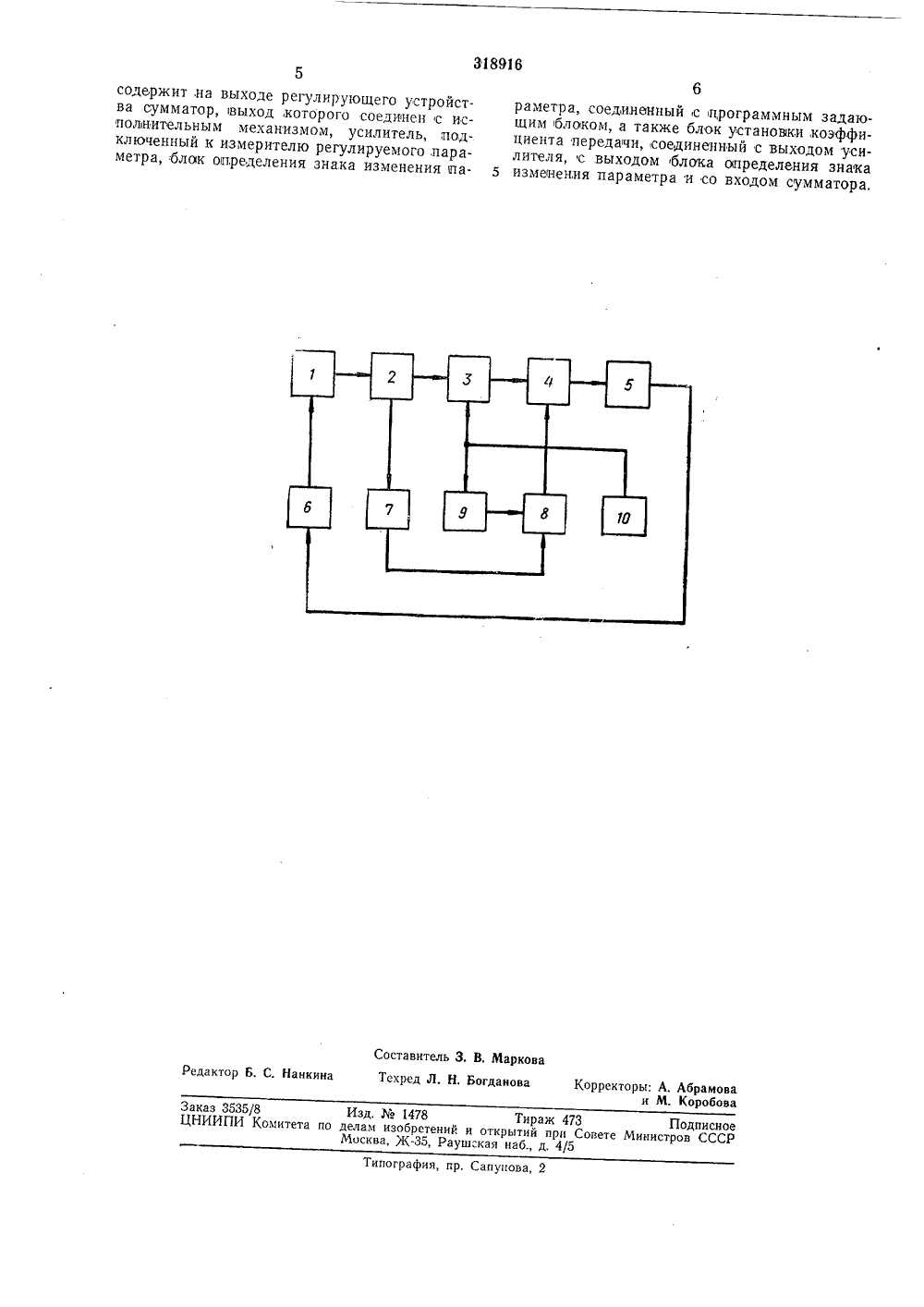
3896 Союз Саветскик Социалистических РеспубликЗависимое от авт, свидетелЗаявлено 12,Ч 11.1969 (с присоединением заявки МПриоритетОпуоликовано 28,Х.1971. Б тва356148/18-24 Ь 19 МП Комитет па аелзм изобретений и открытий при Совете Министров СССРДК 621;316.71-503,5 (088,8) теньага опубликования описания 22.Х 11.197 Авторызобретени Г. А. Заблоцкий, В, Ш. Чернухин и Ю. В. Футрицки О;Дя иф Л,с,п , 1, Г" ститут полупроводников АН СССР явител УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВИзобретение относи регулированию техно и может найти,примен большого числа объек ектов, обладающих зн стью. тся к автоматическому логических параметров ение для автоматизации тов, .в особенности объачительной инерционноВ настоящее время для этого широко используются системы двухпозиционного регулирования, которые в общем случае более просты и дешевы, чем другие системы автоматического регулирования.Известны устройства программного,регулирования, содержащие программный задающий блок, соединенный с двухпозиционным регулирующим устройством, второй вход, которого через измеритель регулируемого параметра соединен с датчиком, установленным на выходе объекта регулирования, который связан с исполнительным устройством.Основным недостатком автоматического двухпозиционного регулирования является наличие колебаний регулируемой величины. При наличии запаздывания в объекте регулирования или дагчике параметры этих колебаний (амплитуда и частота) зависят не только от :параметров объекта регулирования и регулирующего устройства, но и,в значительной степени от разницы между установленными значениями поступающей к объекту регулирования мощности (максимальным и минималь 2ным) и,потребляемой мощностью (от избытка или перепада мощности). Чем больше перепад мощности, тем больше аввплитуда автоколебаний и выше их частота.5 Очень часто регулируемый параметр долженменяться во времени по заданной закономерности (программе). При двухпозиционном программном регулировании в ходе выполнения программы происходит непрерывное изме нение уровня регулируемой величины. В соответствии с этим меняется величина мощности, потребляемой объектом регулирования, Таким образом, перепад мощности и параметры автоколебаний также меняются в соответст вии с изменением регулируемой величины попрограмме. При малых значениях величины регулируемого параметра отклонения в сторону увеличения будут значительно больше отклонений в сторону уменьшения; при больших 20 значениях величины регулируемого параметрабудет иметь место обратная картина. Такая односторонность колебаний заставляет снижать величину максимального перенада мощ.ности с целью ограничения предельной вели чины отклонения регулируемого параметрапри колебаниях, но во многих случаях это неприменимо, так,как цри этом удлиняется время,выхода на заданный режим.Несимметричность колебаний обуславли вает также появление дополнительной статичеокой ошибки остаточного отклонения, которое будет меняться,по диапазону регулирования.Предлатаемое устройство отличается тем, что оно содержит на выходе регулирующего устройства сумматор, выход которого соединен с исполнительным механизмом, усилитель, подключенный к измерителю регулируемого параметра, блок определения знака изменения параметра, соединенный с программным задающим блоком, а также блок установки коэффициента,передачи, соединенный с выходом усилителя, с выходом блока определения знака изменения параметра и со входом сумматора.Это позволяет уменьшить амплитуду .и частоту автоколебаний и величину остаточного смещения.На чертеже изображена блок-схема устройства, где обозначены: 1 - датчик регулируемого параметра; 2 - измерители регулируемого параметра; 3 - двухпозиционное регулирующее устройство; 4 - сумматор; 5 - исполнительный механизм; б - объект регулирования;7 - усилитель; 8 - блок установки коэффициента передачи; 9 - блок определения знака изменения параметра; 10 - ,программный задающий блок,С помощью блоков 1, 2, 3, б, б, 10 осуществляется обычное двухпозиционное программное регулирование. В предлагаемом устройстве к управляющему сигналу, поступающему на вход исполнительного механизма, добавляют составляющую, пропорциональную измеренному значению регулируемой величины. Этот сигнал снимают с реохорда дистанционной передачи в измерительном приборе 2, затем усиливают усилителем 7 до нужной величины и суммируют в устройстве 4, с управляющим сигналом, поступающим с выхода двух позиционного регулирующего устройства д. В результате этого к объекту регулирования подводят мощность, пропорциональную регулируемому параметру во всем диапазоне его изменения, Теперь необходимо значительно меньшее максимальное установленное значение мощности, так как имеет место постоянный,приток энергии к объекту регулирования. Для каждого объекта регулирования подбирают такой коэффициент введения пропорциональной составляющей, при котором обеепечивается изменение значения регулируемой величины, требуемое по программе. При этом к максимальному значению мощности в моменты включения добавляется пропорциональная составляющая.Вследствие уменьшения перепада мощности произойдет пропорциональное уменьшение амплитуды:колебаний и уменьшится их частота. Так как цропорциональная составляющая мощности будет в определенном соотношении с измеренным значением регулируемого параметра, колебания в значительной степени станут более симметричными, В итоге величина остаточного смещения уменьшится,как из-зауменьшения амплитуды колебаний, так и из-за их большей симметрии.Для некоторых объектов, например дляэлектрических нагревательных печей, условия, при которых, происходит увеличение регулируемого параметра (нагрев), поддержание постоянного значения регулируемого параметра (выдержка),и уменьшение регулируемого параметра (охлаждение) различны. Постоянные времени печи при нагревании и охлаждении также различныпричем,при охлаждении постоянная времени имеет большее значение,Если коэффициент введения цропорциональной составляющей будет иметь достаточно большое значение, то при больших скоростях уменьшения температуры в соответствии с программой регулируемый параметр (т, е. температура) не будет успевать следовать за задающим сигналом (т. е. температурой, определяемой программой). В то же время на участках программы с возрастанием температуры желательно иметь достаточно большой,коэффициент введения пропорциональной составляющей, особенно при больших скоростях изменения температур, так как при этом может быть уменьшено требуемое максимальное установленное значение мощности, а следователь.но, и перепад мощности.Поэтому для таких объектов регулирования оптимальным будет изменение коэффициента введения пропорциональной составляющей в зависимости от знака изменения. задающего воздействия согласно программе.Для этой цели, предназначены устройство 9, определяющее знак изменения задающего воздействия, и устройство 8, релейно (скачкообразно) меняющее коэффициент введения пропорционального сигнала. Устройство 9 может быть,выполнено на базе любого дифференциатора медленно меняющихся сигналов, по- скольжу знак изменения задающего воздействия однозначно определяется знаком его первой производной по времени; устройство 8 - на базе любого устройства, имеющего релейный выход с двумя или тремя устойчивыми состояниямиЗначения, коэффициентов введения пропорциональной составляющей сигнала для всех трех тиунов участкав программы (возрастания, убывания и стабильного значения) устанавливают при настройке системы под конкретный объект регулирования. 5 10 15 20 25 30 35 40 45 5055 60 65 Предмет изобретенияУстройство для программного регулирования технологических параметров, содержащее программный задающий блок, соединенный с двухпозиционным регулирующим устройством, второй вход которого через измеритель регулируемого параметра соединен с датчиком, установленным на выходе объекта регулирования, который связан с исполнительным механизмом, отличающееся тем, что, с целью уменьшения амплитуды и частоты автоколебаний и величины остаточного смещения, оноЗаказ 3535/8 Изд. Юа 1478 Тираж 473 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий прп Совете Министров СССРМосква, Ж, Раушская наб., д. 4/5 Типография, пр. Сапунова, 2 содержит на выходе регулирующего устройства сумматор, выход,которого соединен с исполнительным механизмом, усилитель, подключенный к измерителю регулируемого, параметра, блок определения знака изменения лараметра, соединенный с программным задающим блоком, а также блок установки,коэффициента передачи, соединенный с выходом усилителя, с выходом блока определения знака 5 изменения параметра и со входом сумматора.
СмотретьЗаявка
1356148
Г. А. Заблоцкий, В. Ш. Чернухин, Ю. В. Футрицкий, Институт полупроводников СССР, ЬИБ ИОТЕНА
МПК / Метки
МПК: G05B 11/16, G05B 19/33
Метки: параметров, программного, технологических
Опубликовано: 01.01.1971
Код ссылки
<a href="https://patents.su/3-318916-ustrojjstvo-dlya-programmnogo-regulirovaniya-tekhnologicheskikh-parametrov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного регулирования технологических параметров</a>
Устройство для измеренияя величины и знака статического заряда

Номер патента: 444983
Опубликовано: 30.09.1974
Автор: Бородовский
МПК: G01R 5/28
Метки: величины, заряда, знака, измеренияя, статического
...конденсаторов, второй вход которого подключен к изолированному зажиму 7 контактами 8 и 9, соединяемыми тумблером 10. Входом устройства служит съемный патрон 11, заземляемый вместе с другим входйым зажимом 12.устройство для измеренйя величины и знака заряда работает следующим образом.При измерений величины заряда Ох подвижный контакт устанавливают на заземленном конце потенциометра 5 и к входу прибора с помощью патрона 11 или без него подключают соответствующий приемник статистического заряда, Поскольку блок конденсаторов оказывается при этом подключенным параллельно зажимам 7 и 12, увеличивается емкость С устройства и по шкале3 444 поибора отсчитывается потенциал О известной емкости С относительно земли. По значениям С и 0 опеделяют...
Устройство для управления асинхронным частотно-регулируемым электродвигателем

Номер патента: 1128361
Опубликовано: 07.12.1984
Авторы: Галкина, Лакс, Ланген, Сениковский, Суханова
МПК: H02P 7/42
Метки: асинхронным, частотно-регулируемым, электродвигателем
...параметрам ин 61 4дуктивного сопротивления рассеяния ротора и активного сопротивления ротора в каждой фазе модели, выход пер- .вого интегратора через первый блок перемножения, второй вход которого соединен с блоком определения частоты вращения, соединен со свободным зажимом резистора с параметром, эквивалентным активному сопротивлению ротора во второй фазе, выход второго интегратора через инвертор.подключен к второму блоку перемножения, второй вход которого соединен с блоком определения частоты вращения, а выход второго блока перемножения соединен со свободным зажимом резистора с параметром, эквивалентньи .активному сопротивлению ротора в первой фазе, при этом выходы интеграторов подклочены к блоку вычисления модуля...
Устройство для реверса асинхронного частотно-регулируемого электродвигателя

Номер патента: 1418881
Опубликовано: 23.08.1988
Автор: Волков
МПК: H02P 7/42
Метки: асинхронного, реверса, частотно-регулируемого, электродвигателя
...управление электродвигателем 1 при постоянстве магнитного потокосцепления (Е/Есопят). Установившемуся режиму работы "Вперед" соответствуют следующие логические сигналы на выходах элементов устройства: компаратор 14 - "1"; логическая схема И-НЕ 20 - "0", датчик 12 нулевой частоты вращения - "0"; элемент 11 совпадения типа ИНЕ - "1"; первый синхронный триггер 13 - "1", "0"; формирователь 15 импульсов - "0"; логическая схема И-НЕ 21 - "1"; асинхронный триггер 18 " "0", второй синхронный триггер 19 - "1" "0" передаточный коэффициентЭ 881 4блока 6, задания полярности равен+1, кгпоч 30 (фиг.2) закрыт.Режим реверса электродвигателяосуществляется в устройстве в дваэтапа (с интервалами времени Т -Сзи г. -г. ). Командой на реверс...
Устройство для управления асинхронным частотно-регулируемым электродвигателем

Номер патента: 1793526
Опубликовано: 07.02.1993
Авторы: Лакс, Ланген, Портупеев
МПК: H02P 7/42
Метки: асинхронным, частотно-регулируемым, электродвигателем
...эквивалентные сопротивления взаимоиндуктивности и сопротивления рассеяния ротора выполнены регулируемыми, два входа по току и напряжению первого фазового дискриминатора 38 соединены с соответствующими инфар-ф мационными выходами инвертора напряжения, а его выход через первый блок 39 сравнения модели асинхронного электродвигателя соединен с входами первого 43 и второго 44 масштабных усилителей, второй фазовый дискриминатор 37 соединен входами по току и напряжению с соответствующими информационными выходами модели инвертора 36 напряжения, а его выход соединен с вторым входом первого блока 39 сравнения модели асинхронного электродви"ателя, входы по току первого 38 и втоасинхронного электродвигателя соединены с входами третьего 45,...
Устройство для регулировки сдвига фаз между напряжением у источника электрического переменного тока и напряжением у приемника этого тока без изменений величины напряжения у приемника

Номер патента: 19275
Опубликовано: 28.02.1931
Авторы: Бонч-Бруевич, Кугушев
МПК: H03H 7/20
Метки: величины, изменений, источника, между, напряжением, переменного, приемника, регулировки, сдвига, фаз, электрического, этого
...два полных сопротивления, последовательно и параллельно приемнику; фиг. 2 - форму выполнения обкладки конденсаторов.На схеме фиг, 1 цифрами 1 и б обозначены соответственно источник и приемник переменного тока, цифрами 2 5, 7 и 10 - катушки самоиндукции, входящие в состав полных сопротивлений и цифрами 3. 4 и 8, 9 - конденсаторы, механически связанные попарно.Изменению емкости одного конденсатора, например 4, включенного параллельно приемнику, соответствует одновременное изменение емкости конденсатора 3, включенного последовательно с нии. Обкладкам этих конденсаторов придается форма, определяемая уравнением, выраженным в полярных коордидля пластин конденсатора 4. Здесь 1" и 01 - радиусы векторы для пластин конденсаторов 3 и 4, а а,в, 1;,...
Предыдущий патент: Устройство для автоматического управления тепловой обработкой железобетонных изделий
Следующий патент: Устройство переблокировки программ регулирования
Случайный патент: Прибор для получения обрывной дуги в установке спектрального анализа