Позиционная система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 282018
Автор: Симецкий
Текст
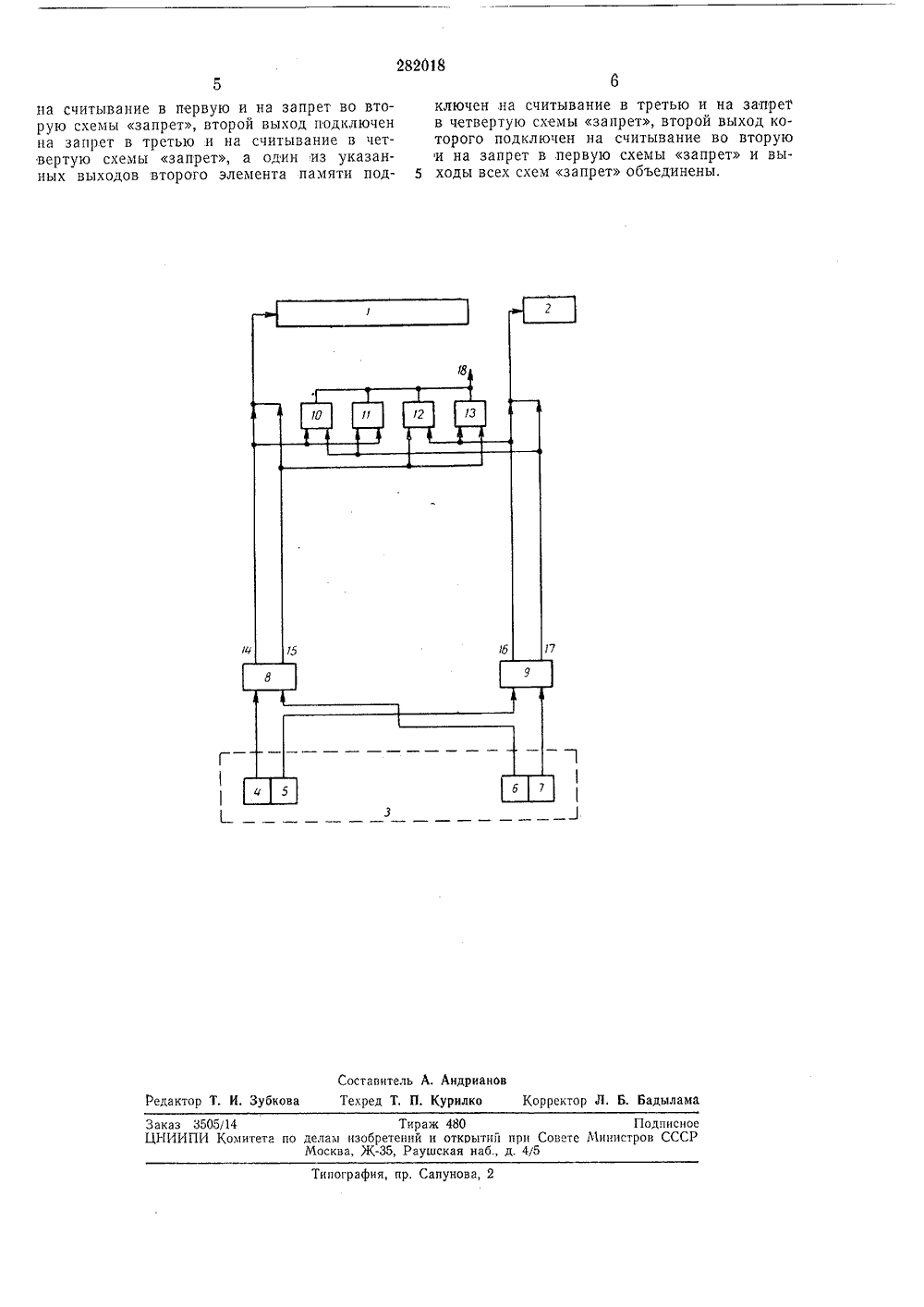
Союз Соеетоиив Социалиотичеокив РеоотСлив(Ь 05 ЬДК 62-503.55(088.8) иотвитет оо делавю ооретеиий и отирыти ри Совете Миииотро СССР. Симецкий явите ИЦИОННА АММНО АВЛЕНИЯ ЕМ П ю схемы а запрет ю схемы дов втоа считытую схе- подклюзапрет в сех схем в первую и на запрет во вторурет; второй выход подключен нетью и на считывание в четвертурет, а один из указанных выхо5 рого элемента памяти подключен нванне в третью и на запрет в четвермы запрет, второй выход которогочен на считывание во вторую и напервую схемы запрет и выходы вО запрет объединены.На чертеже изображена предлагаемая схема позиционной системы программного управления.Она состоит из вводного устройства (на чер теже не показано), связанного с позиционируюшим счетчиком 1 и контрольным счетчиком 2; датчика обратной связи 8, содержащего четыре фотоэлектрических преобразователя 4 7, объединенных в две группы (4 и б - пре- О образователи первой группы, б и 7 - преобразователи второй группы); двух элементов памяти 8 и 9; схемы непрерывного контроля работы датчика обратной связи, содержащей четыре логические схемы запрет 10 - 13. ниезапв трзап В датчике оора4 подключен на тель б на запись разователь б подк О образователь 7 на Изобретение относится к ооласти программного управления станками.Известна позиционная система программного управления с относительным отсчетом координат, в которой позиционирующий и контрольный счетчики связаны с вводным устройством, а к входу позиционирующего счетчика подсоединены выходы датчика ооратной связи, выполненного в виде поочередно возбуждающихся преобразователей.Основным недостатком таких систем является то, что возможно появление накопленных ошибок и несвоевременное их обнаружение.Цель изобретения - повышение надежности работы позиционной системы программного управления.Для этого в предлагаемую систему введены элементы памяти и логические схемы запрет так, что выход первого преобразователя датчика обратной связи подключен на считывание, а выход второго - на запись первого элемента памяти, выходы которого подсоединены ко входу позиционирующего счетчика; ко входу контрольного счетчика подсоединены выходы второго элемента памяти, переключение которого производится третьим и четвертым преобразователями, работающими параллельно с соответственно первым и вторым; кроме того, один из указанных выходов первого элемента памяти подключен на считываной связи преооразователь читывание, а преобразоваэлемент памяти 8; преобючен на считывание, а презапись в э,лемент памяти 9,45 50 55 60 65 Оба выхода 15 и 14 элемента памяти 8 подсоединены ко входу позицпонирующего счетчика 1, а оба выхода 1 б и 17 элемента памяти 9 подсоединены ко входу контрольного счетчика 2. Кроме того, выход 14 элемента памяти 8 подключен на считывание в схему запрет 10 и на запрет в схему 11, выход 15 подключен на считывание в схему запрет 12 и на запрет в схему 13. Выход 1 б элемента памяти 9 подключен на запрет в схему запрет 12 и на считывание в схему 13, выход 17 подключен на запрет в схему запрет 10 и на считывание в схему 11. Выходы 18 схемы запрет 10, 11, 12, 13 объединены.Позиционная система работает следующим образом:В датчике ооратной связи преобразовате,ти объединены в две группы, которые возбуждаются поочередно, т. е. вначале возбуждается первая группа преобразователей 4, 5 и выключается, а затем возбуждается вторая группа преобразователей б, 7 и выключается и т. д. Поочередное возбуждение обеих групп преобразователей обеспечивается смещением диафрагмы или шторки одной группы преобразователей относительно другой на половину шага между штрихами или щелями диска или линейки датчика.При переключении преобразователями 4 и б элемента памяти 8 на выходах 14 и 15 появляются сигналы, которые подаются на выход позиционирующего счетчика, а на вход контрольного счетчика 2 подаются сигналы с выходов 1 б и 17 элемента памяти 9, который переключается преобразователями 5 и 7.Так как выходные сигналы с каждого элемента памяти появляются только при переключении последнего, то создается электрический люфт в пределах дискретности датчика обратной связи, Это позволяет полностью исключить ошибки, связанные с возможностью их появления при многократном возбуждении одного и того же преооразователя от вибраций датчика или флюктуаций света и напряжения питания.Схема контроля с раздельными каналами в позиционирующий и контрольный счетчики позволяет обнаружить ошибку в работе датчика или позиционирующего счетчика в конце обработки координатного перемещения при р ассогласов анни состояний позиционирующего и контрольного счетчиков, Эта схема контроля позиционирования применима для систем, управляющих такими станками, как координатно-сверлильные, расточные и другие, у которых во время позиционирования не происходит обработки детали,На фрезерных, токарных и других станках, обрабатывающих детали во время координатного перемещения, ошибка работы датчиков обратной связи должна быть оонаружена в момент ее появления, чтобы предотвратить брак.Для этого применена схема непрерывного контроля работы датчика обратной связи, со 5 10 15 20 25 30 35 40 стоящая из четырех логических схем запрет 10, 11, 12, 13.Сигнал с выхода 14 элемента памяти 8 производит считывание в схеме 10 и запрет в схеме 11, а сигнал с выхода 1 б элемента памяти 9 произведет считывание в схеме 13 и запрет в схеме 12, При считывании выходные сигналы в схемах 10 и 13 отсутствуют, так как в них был осуществлен запрет сигналом предварительной установки при включении системы или же при работе датчика сигналами с выходов 15 и 17.Сигнал с выхода 15 элемента памяти 8 произведет считывание в схеме 12 и запрет в схеме 13, а сигнал с выхода 17 элемента памяти 9 произведет считывание в схеме 11 и запрет в схеме 10. При считывании выходные сигналы в схемах 11 и 12 отсутствуют, так как в них был осуществлен запрет сигналами с выходов 14 и 1 б,Такое перекрестно-последовательное считывание и запрет в схемах 10 - 13 позволяет контролировать каждый выходной, импульс с датчиков обратной связи, например, если пропал импульс с выхода 14 элемента памяти 8 или в этом канале связи, то в схеме 11 не будет произведен запрет и при считывании следующим импульсом, на выходе схемы 11 появится сигнал 18. Если же на выходе 14 элемента памяти 8 или в этом канале связи появится лишний импульс или помеха, то произойдет повторное считывание в схеме 19, а так как запрет был произведен только перед первым считыванием, то при повторном считывании на выходе схемы 10 появится сигнал 18. Точно таким же образом контролируются сигналы с выходов 15, 1 б, 17 и их каналы связи, На объединенном выходе 18 всех систем запрет появляется сигнал ошибки, которым производится останов привода и отвод инструмента из зоны резания. Предмет изобретения Позиционная система программного управления, в которой позиционирующий и контрольный счетчики связаны с вводным устройством, а к входу позиционирующего счетчика подсоединены выходы датчика обратной связи, выполненного в виде поочередно возбуждающихся преобразователей, отличающаяся тем, что, с целью .повышения надежности работы системы, в нее введены элементы памяти и логические схемы запрет так, что выход первого преобразователя подключен на считывание, а выход, второго - на запись первого элемента памяти, выходы которого подсоединены ко входу позиционирующего счетчика, а ко входу контрольного счетчика подсоединены выходы второго элемента памяти, переключение которого производится третьим и четвертым преобразователями, работающими парллельно с соответственно первым и вторым; кроме того, один из указанных выходов первого элемента памяти подключен282018 Г Составитель А. АндриановИ. Зубкова Техред Т, П. Курилко Корректор Л. Б. Бадылам Редак Заказ 3505/14ЦНИИПИ Комитета п Тираж 480 Подписное лам изобретений и открытий при Совете Министров СССР осква, Ж, Раушская наб., д. 4/5 пография, пр. Сапунова на считывание в первую и на запрет во вторую схемы запрет, второй выход подключен на запрет в третью и на считывание в четвертую схемы запрет, а один из указанных выходов второго элемента памяти подключен на считывание в третью и на запрет в четвертую схемы запрет, второй выход которого подключен на считывание во вторую и на запрет в первую схемы запрет и вы ходы всех схем запрет объединены.
СмотретьЗаявка
1336725
Ю. А. Симецкий
МПК / Метки
МПК: G05B 19/19
Метки: позиционная, программного
Опубликовано: 01.01.1970
Код ссылки
<a href="https://patents.su/3-282018-pozicionnaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Позиционная система программного управления</a>
Способ диагностики отказов элементов контура обратной связи технических объектов и устройство для его осуществления

Номер патента: 1239688
Опубликовано: 23.06.1986
Авторы: Головенкин, Сницаренко
МПК: G05B 23/02
Метки: диагностики, контура, обратной, объектов, отказов, связи, технических, элементов
...контура обратной связи, а состояние технического объекта в целом оценивают по его вьгходному параметру.2, Устройство для диагностики отказов элементов контура обратной связи технических объектов, содержащее датчики допускового контроля, 1239688 1Изобретецие относится к технической диагностике и может бытт. использовано в системах контроля сложныхтехнических объектов для поиска места неисправности среди элементов, 5охваченных цепью обратной связи.Цель изобретения - повьппение достоверности и быстродействия устройствдиагностирования контура обратнойсвязи технических объектов без изменения структуры технических объектовпри локализации неисправности.На чертеже показана Функциональная схема устройства.Устройство, реализующее способ...
Устройство для диагностики отказов элементов контура обратной связи технических объектов

Номер патента: 1751719
Опубликовано: 30.07.1992
Автор: Столович
МПК: G05B 23/02
Метки: диагностики, контура, обратной, объектов, отказов, связи, технических, элементов
...31, при которых синхроимпульсы с периодом Т не поступают на счетный вход триггера 19. Если в результате неисправности одного йз пороговых элементов 23 и 24 узла 21 контроля на его выходе присутствует сигнал "0", то эта неисправность не нарушает работу данного датчика и, соответственно, не влияет на достоверность диагностики, так как при этом с,узла 21 контроля выдается сигнал, совпадающий с сигналом, выдаваемым с исправного узла 22 контроля, при этом индикатор 20 мигает с периодом , 2 Т, свидетельствуя о .фактическом состоянии функционального элемента технического объекта 16.Когда параметр одного или нескольких функциональных элементов технического обьекта 16, например 1 и 6, выходит за пределы, например, нижнего поля допуска, а датчики...
Способ подготовки к работе объемного гидропривода с регулируемым насосом, подключенным к гидромотору по замкнутой схеме циркуляции при экстремально низких температурах эксплуатации

Номер патента: 1492122
Опубликовано: 07.07.1989
МПК: F16H 39/44
Метки: гидромотору, гидропривода, замкнутой, насосом, низких, объемного, подготовки, подключенным, работе, регулируемым, схеме, температурах, циркуляции, эксплуатации, экстремально
...нмеханизм 2 устанавливают необходимыйрабочий объем регулируемого насоса 1и осущестнляют подачу рабочей жидкости в гидромотор З,приводя его новращение. При этом предварительноподогретые предохранительные клапаны 7 и 8 снижают пиковые забросыдавления нагнетания н момент началагде К, К, - соответственно электрические сопротивления теплоэлектронагревателей 10 и 12;С, С - удельная теплоемкостьрабочей жидкости, металла;Мгн, Мг - собственная масса металла гидробака 9 икорпуса 14;Мгну МФГМ масса рабочей жидкости в гидробаке 9, нкорпусе 14,При этом обеспечивается синхронность подогрева корпуса 14 и гидробака 9. В результате сокращается расход электрической энергии в ходе реализации предпускового подогрена и50 появляется возможность...
Система программного управления станками
Номер патента: 503211
Опубликовано: 15.02.1976
Авторы: Болдинов, Кошкин, Федоров
МПК: G05B 19/418
Метки: программного, станками
...на схемы элементов И б, 8, 10, 12 и 14, при этом элементы И 7, 9 и 13, управляемые сигналом Нарезание резьбы НР, находятся в закрытом состоянии. Система перекоммутируется в три независимых устройства; двухкоординатный интерполятор, состоящий из блоков 1, 3, 4, 5, 6, 10 и 14, и два одинаковых устройства прямоугольного управления, состоящие соответственно из блоков 8, 11, 16, 18, 20 и 12, 15, 17, 19, 21,Информация ЬХ и ЛУ о перемещениях суппорта, обрабатывающего конусную поверхность, заносится в блоки 4, 5. По сигналу Пуск частота с выхода генератора 1 через элемент И б поступает на вход распределителя 3, с выхода которого последовательность распределенных импульсов поступает на блоки ключей 4, 5, с их выходов через элементы И 10,...
Устройство для программного управлениясистемами контроля аппаратуры

Номер патента: 798718
Опубликовано: 23.01.1981
Авторы: Мангилев, Тоскин, Чубаров
МПК: G05B 19/18
Метки: аппаратуры, программного, управлениясистемами
...допусков по цепи 22 поступает на вход системы автоматического контроля. С выходов блока б памяти управляющие сигналы поступают соответственно по цепям 23 и 24 на входы автоматической системы контроля.После окончания измерения системы автоматического контроля вырабатывают импульс, который по цепи 16 поступает на вход блока 9 синхронизации и устанавливает в исходное состояние блок 9 и по цепи 20 - блоки системы автоматического контроля.При необходимости повторного выполнения данной микрокоманды в блок 9 синхронизации по цепи 17 подается запускающий сигнал и алгоритм работы повторяется.При посЛедовательном выполнении всей совокупности микрокоманд управление осуществляется следующим образом. Специальной командой блок 9 синхронизации,...
Предыдущий патент: 282017
Следующий патент: 282019
Случайный патент: Способ исследования совершенства структуры монокристаллов