Способ управленр1я инерционным объектом при ограниченном управляющем воздействии
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 196153
Автор: Чуич

Текст
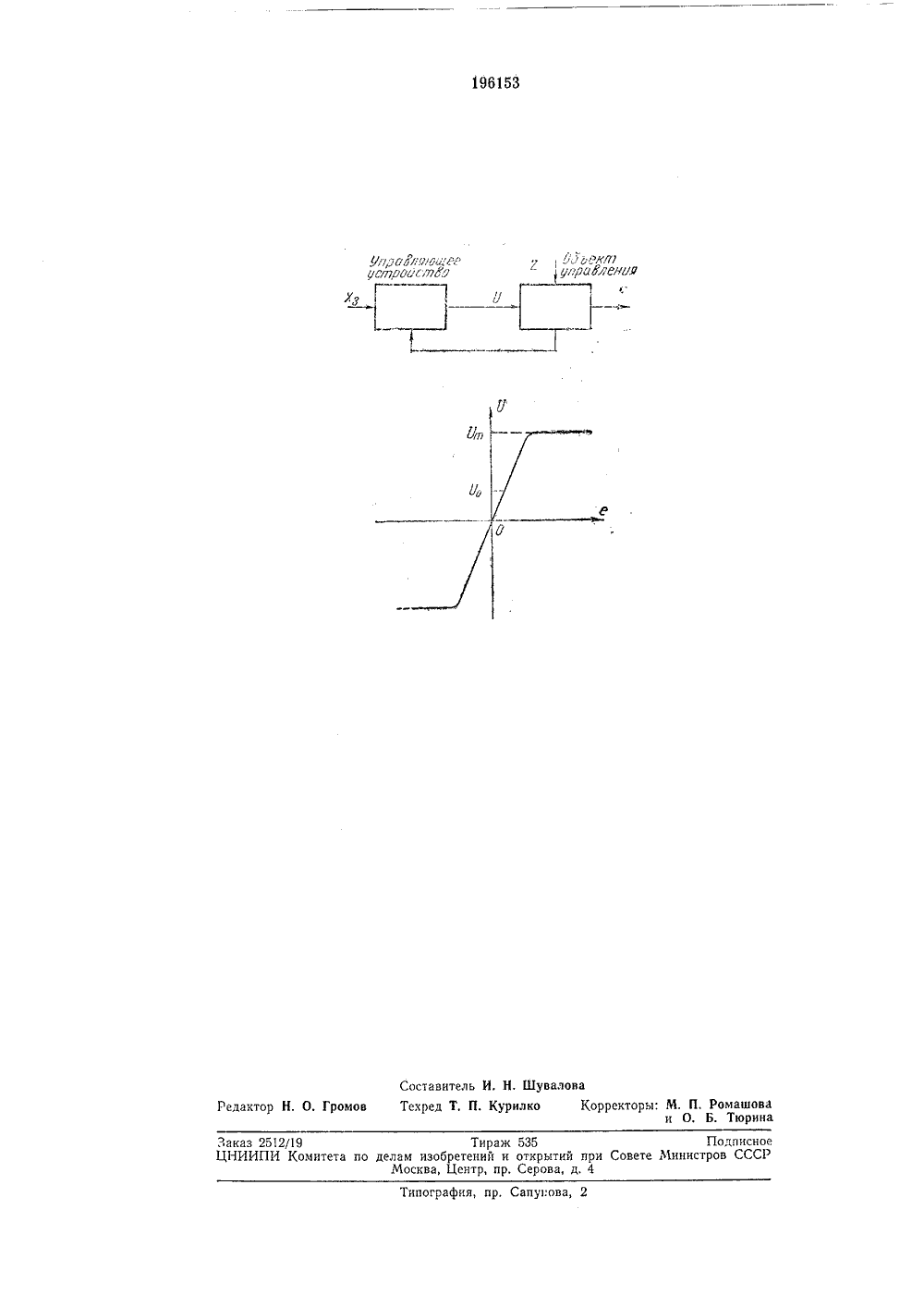
Союз Соеетсииз циалистическиз Республин ВТОРС У СВИДЕТЕЛЬСТВУ Зависимое от авт видетельств/26-24)10870 аявлено 28.И.196 присоединением заявки Комитет по делам зооретеиий и отирытий при Совете Мииистров СССРиоритет плетень11 967 8) вано 16 Х ата опубликова описания 8,И 11.1967 Автор тзоб 1 зетен В. Г. Чу Заявитель Ленинградский электротехнический институт имени. Ульяно ПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ О И ОГРАНИЧЕННОМ,УПРАВЛЯ 1 ОЩЕМ ВОЗ ЕКТОМ ЙСТВИ оп ош ып стить появления больших бок, управляющее устройолнять две взаимосвязанные ать поведение системы с раннего выявления опасных ь необходимую ния и выключени ующего сигнала исполнительного я мощности) и п насыщения, что с последовая дополни" еф, пода. органа (на- ереводящеоздает макВ реальных систдающее Х так ивия в основных рестаточно плавныйдельные сравнител емах управлен возмущающее кимах работь характер и т но редкие мо ия как за воздейстимеют доолько в отентьт измеИзвестны способы управления инерционным объектом при ограниченном управляющем сигнале, основанные на введении в закон управления производных сигнала ошибки, а также на определенной последовательности изменений полярности управляющего сигнала КПредложенный способ отличается от известных тем, что сравнивают знаки сигнала ошибки и ее производной, а также абсолютную величину текущего значения производной с абсолютной величиной се допустимого значения и при совпадении знаксв сигнала ошибки и ее производной и одновременном превышении производной ее допустимого значения подают на вход объекта параллельно основному сигналу управления дополнительный форсирующий сигнал, Величину форсирующего сигнала поддерживают постоянной независимо от дальнейшего изменения производной, а отключают его при снижении абсолютной величины ошибки рассогласования до заранее установленного значения,Предлагаемый способ поясняется чертежом. няются с относительной большой скоростью на ограниченном интервале времени, В связи с этим в управляющем устройстве предусмотрены два независимых канала: основной, функционирующий при нормальном протека. нии процесса, и дополнительный, по которому в опасные (в смысле возможности появления больших динамических ошибок) моменты времени будет поступать дополнительный форсирующий сигнал. Такое разделение капалов повышает надежность системы, так как в случае выхода из строя болес сложного канала дополнительной форсировкп система сохранит работоспособность по основному каналу, хотя и с большими динамическими ошибками. Чтобы не д динамических ство должно в функции: а) прогнозиро целью возможно моментов; б) обеспечив а тельность включ тельного форсир ваемого на вход пример, усилите го его в режим3симально возмож. орсирование переходного процесса в си те е.При этом запас оосирсрки, определяемый по передаточнойфМфктер стике исполнительного оргщ цутно ние максимального зпаченйя С ущцвля щего воздействия к его наибольшему значению С, в установившемся режиме, обычно ограничивается энергетическими соображениями.В случае управления объектами, характеризующимися требованием минимальной динамической (мгновенной) ошибки, при ограниченных ресурсах управления (насыщении исполнительного органа), простое введение дополнительных сигналов по производным от ошибки (а также и от задающего или возмущающего воздействия) не дает желаемого эффекта, так как дополнительный форсирующий сигнал в виде кратковременного импульса большой высоты срезан и практически не оказывает влияния на переходный процесс в системе,По предлагаемому способу включение дополнительного форсирующего сигнала соответствующего знака происходит в момент, когда при совпадении знаков ошибки е иЫ яскорости ее изменения в = (что свидеИтельствует о нарастании, а не убывании Ы) величина в 1 превысит такое пороговое допустимое (критическое) значение е, выше которого действие одного основного контура системы оказывается недостаточным (т. е. динамическая ошибка в может превзойти допустимое значение). После этого сигнал е отключается, а еф остается до тех пор, пока абсслютная величина ошибки 1 е не уменьшится до некоторого достаточно малого значения е, После этого еф отключается, и система возвращается в нормальный (не фор 196153сированный) режим работы по основному контуру.Величины параметров настройки е и еподбираются экспериментально при отладке системы управления или при ее моделировании. В качестве первого приближения (исходного для дальнейшей настройки) можно принять е, = а (где а - предельное значение 10 скорости изменения линейного задающеговоздействия Х, = а 1), выше которого ошибка системы управления по основному контуру превосходит допустимую. Значение в ограничивается снизу допустимой амплиту дой автоколебаний, которые могут иметь место в системе в моменты включения канала дополнительной форсировки при слишком малой величине в20Предмет изобретенияСпособ управления инерционным объектомпри ограниченном управляющем воздействии, основанный на измерении ошибки рассогла сования и ее первой производной, отличаюи(ийся тем, что, с целью уменьшения мгновенной динамической ошибки и повышения надежности управления, сравнивают знаки сигнала ошибки и ее производной, а также абсолютную величину текущего значения производной с абсолютной величиной ее допустимого значения и при совпадении знаков сигнала ошибки и ее производной и одновременном превышении производной ее допустимого значения подают на вход объекта параллельно основному сигналу управления дополнительный форсирующий сигнал, причем поддерживают величину форсирующего сигнала постоянной независимо от дальнейшего 40 изменения производной и отключают форсирующий сигнал при снижении абсолютной величины ошибки рассогласования до заранее установленного значения.Составитель И. Н. Шувалова Громов Техред Т. П. Курилко Корректоры: М. П. Ромашова и О. Б. ТюринаРедактор Н. Типогра я, пр, Сапунова,аказ 2512/19 Тираж 535 ПодписиНИИПИ Комитета по делам изобретений и открытий при Совете Министров ССС Москва, Центр, пр. Серова, д. 4
СмотретьЗаявка
1087038
Ленинградский электротехнический институт имени В. И. Уль нова
В. Г. Чуич
МПК / Метки
МПК: G05B 11/06
Метки: воздействии, инерционным, объектом, ограниченном, управленр1я, управляющем
Опубликовано: 01.01.1967
Код ссылки
<a href="https://patents.su/3-196153-sposob-upravlenr1ya-inercionnym-obektom-pri-ogranichennom-upravlyayushhem-vozdejjstvii.html" target="_blank" rel="follow" title="База патентов СССР">Способ управленр1я инерционным объектом при ограниченном управляющем воздействии</a>
Пневматическое устройство для выделения среднего значения сигнала

Номер патента: 478320
Опубликовано: 25.07.1975
Авторы: Ключников, Логинов, Ястремский
МПК: G06G 5/00
Метки: выделения, значения, пневматическое, сигнала, среднего
...вход которого соединен с И выходом элемента сравнения 4, а выход суправляющей камерой ячейки памяти 5,вход которой соединен с вхоустройства, а выход с выходнымустройства;Устройство работает слезом. Входной сигнал поступает ва вход дифферевпирующих элементов 1 и 2, с выхода элемента 2 на один из входов элемента сравнения 4. На другой вход элемента 4 подается давление Р, с помощью котозадрого обеспечиваетса устойчиваа работаустройства Выходной сигнал элемента сравнения 4 принимает значение, равное нулю или единице в зависимости от знака второй производной входного сигнала. Элемент 3 формирует кратковременный импульс, дтщтельность которого определяется временем, необходимым для запоминания ячейкой памяти 5 входного сигнала в точке...
Корредометрический цифровой измеритель действующего значения сигнала

Номер патента: 600721
Опубликовано: 30.03.1978
Авторы: Билинский, Микельсон, Скагерис, Швецкий
МПК: G06F 17/18, G06G 7/52
Метки: действующего, значения, измеритель, корредометрический, сигнала, цифровой
...значения сигнала,Коррелометрический цифровой измеритель действующего значения сигнала содержит входной усилитель 1, выход которого соединен с первыми входами компараторов 2 и 3, источник 4 постоянного напряжения, подключенный ко входу аналогового сумматора 5, выход которого соединен с другим входом компаратора 2, генератор 6 тактовых импульсов, первый выход которого соединен со входами тактовых импульсов компараторов 2 и 3, а другой выход - со входом переключения генераторапсевдослучайных чисел, выходы прямого кода которого соединены со входами цифро-аналогового преобразователя 8 и с одними входами группы вентилей 9, а выходы дополнительного кода - с одними входами другой группы вентилей 10, другие входы которой через логический инвертор...
Коррелометрический цифровой измеритель действующего значения сигнала

Номер патента: 738147
Опубликовано: 30.05.1980
Авторы: Билинский, Заубе, Краузе, Микельсон
МПК: G06F 17/18
Метки: действующего, значения, измеритель, коррелометрический, сигнала, цифровой
...групп вентилей 13 и 14, а вторые входы - с выходом компаратора кодов 9, первый вход элемента И 15 подключен к выходу компаратора 3, первый вход элемента И 16 через логический инвертор 17 подключен к выходу комйаратора 2, вторые входы групп вентилей 11 и 13 соединены с выходами прямого кода генераторов 7 и 8 псевдослучайных чисел соответственно, а вторые входы групп вентилей 12 и 14 - с выходами дополнительного кода генераторов 7 и 8 псевдослучайных чисел соответственно. Выходы всех групп вентилей подключены к соответствующим входам решающего блока 18, выход которого соединен с регистрирующим устройством 19.Оценка эффективного значения Х измеряемого сигнала х(е) определяет- ся следующим образом.Измеряемый сигнал центрируется,...
Устройство для выделения максимального значения сигнала яркости из телевизионного сигнала

Номер патента: 906032
Опубликовано: 15.02.1982
Авторы: Айрапетян, Геворкян, Елефтеров, Оганджанян
МПК: H04N 5/19
Метки: выделения, значения, максимального, сигнала, телевизионного, яркости
...гасящие импульсы с частотой 1/и, где и = 2,3,4коэффициент деления счетчика, Этиимпульсы необходимы для сброса пиковых детекторов. С выхода источника 1сигнал поступает на вход первогокоммутатора 2. В течение времеви Твидеосигнал через него поступаетна вход первого пиконого детектора 4, который работает в режиме выделения уровня белого видеосигнала. При этом второй пиковый детектор 5 разомкнут по входу и хранит уровеньбелого предыдущего периода, Этотуровень чере второй коммутатор 3 и усилитель 9 постоянного тока поступает на выход. В течение вреМЕни Т первый коммутатор 2 посылает видеосигнал на вход второго пикового детектора 5, который разомкнут по входуПервый пиковый детектор 4 хранит уровень белого видеосигнала, выделенный в...
Способ преобразования среднего значения сигнала в код

Номер патента: 951696
Опубликовано: 15.08.1982
МПК: H03K 13/20
Метки: значения, код, преобразования, сигнала, среднего
...следующим образом.Аналоговая часть устройства,включающая источник 2, интегратор 3, генератор 1, источник 5 и сравнивающее устройство 6 работает в асинхронном режиме непрерывно. В исходном состоянии выходной сигнал интегратора 3 Цравен пороговому сигналу 0( Фиг.2, г) а выходной сигнал генератора ч О к (фиг. 2,в ) равен нулю, На первый и второй входы интегратора поданы вспомогательный Офиг. 2,б) и преобразуемый Ц( фиг. 2,а ) сигналы.Величина вспомогательного сигнала выбирается из условия отсутствия нелинейных искажений на выходе интегратора при интегрировании суммы максимального входного и вспомогательного сиГналов,В момент времени то начинает развертываться во времени Ок, и интегратор 3 одновременно интегрирует преобразуемый 0(,...
Предыдущий патент: Способ автоматического регулирования
Следующий патент: Устройство для автоматического
Случайный патент: Способ активации цементной суспензии и устройство для его осуществления