Вычислительное устройство для автоматического определения и контроля режима работы роторного
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
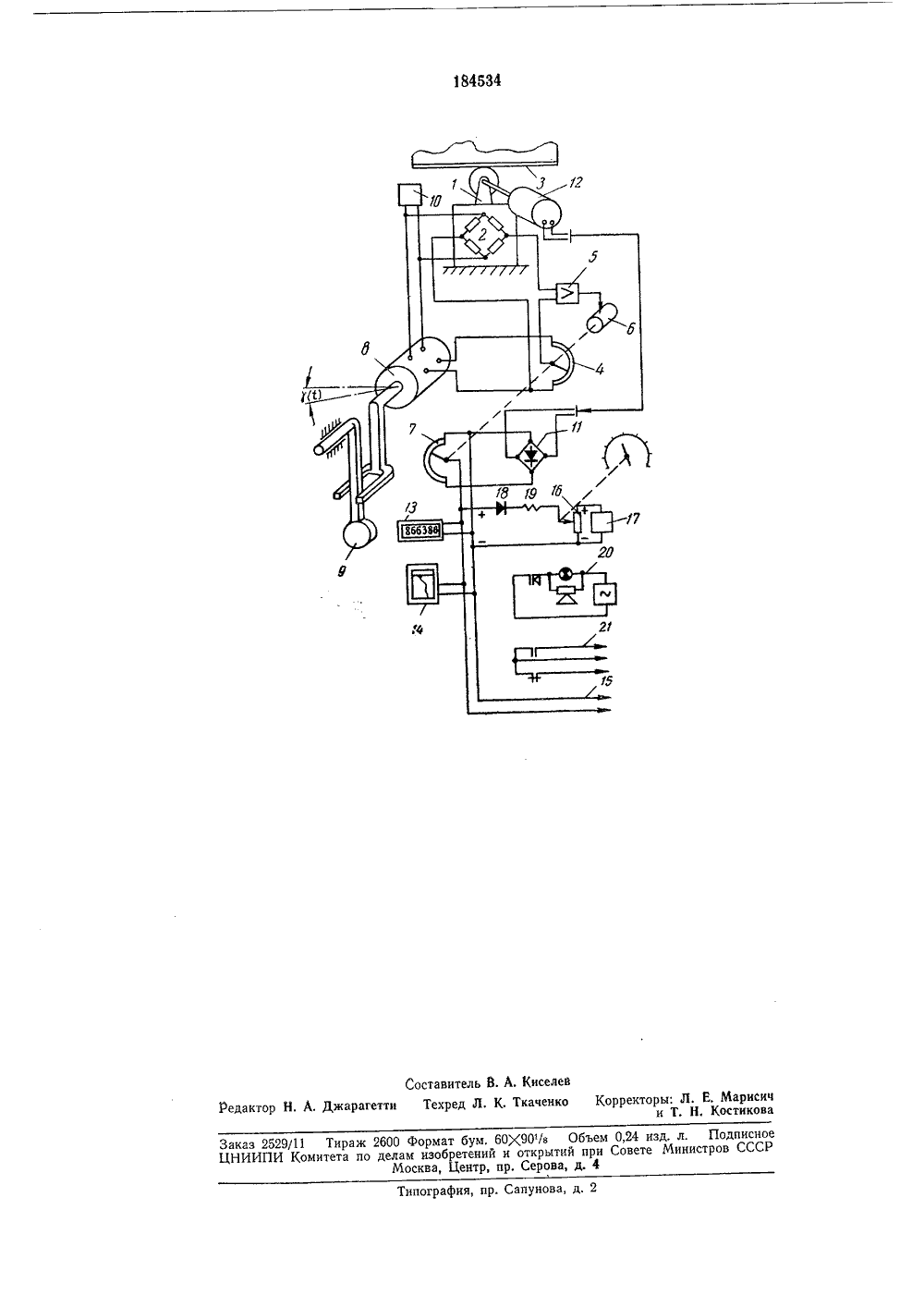
845.34 Союв Советских Социалистических Республикl Зависимое от авт, свидетельстваЗаявлено 12.111,1963 ( 824610/26-24)с присоединением заявкиПриоритетОпубликовано 21.т 11.1966. БюллетеньДата опубликования описания 26.Х.1966 42 пт, 36421, 2884 с 1, 3/18 606 Котхитет по аелатх аобретекий и открытий при Совете Министров СССР, Кузнецо Заявитель ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГОПРЕДЕЛЕНИЯ И КОНТРОЛЯ РЕЖИМА РАБОТЫ РОТОРНОГОЭКСКАВАТОРА Известны устройства для определения режима работы роторного экскаватора, содержащие датчики погонной нагрузки и скорости движения транспортерной системы экскаватора и автокомпенсационную систему измерения сигнала датчика погонной нагрузки.Однако при этих устройствах значительно запаздывает определение текущего значения весовой производительности экскаватора и невозможно использование выходного сигнала устройства для оперативного контроля и автоматического регулирования режима работы роторного экскаватора. В предлагаемом устроистве с целью уменьшения времени запаздывания в определении текущего значения весовой производительности экскаватора в цепь питания элемента, формирующего сигнал обратной связи авто- компенсационной системы, включен синуснокосинусный вращающийся трансформатор, обмотки статора которого подключены к источнику питания, косинусная обмотка ротора соединена с формирователем сигнала обратной связи, а ротор кинематически связан с датчиком угла наклона транспортера и обмотки статора которого подключены к источнику питания, а косинусная обмотка ротора соединена с формирователем сигнала обратной связи. При таком выполнении устройства в процессе вычисления текущего значения весовой производительности экскаватора автоматически учитываются изменения угла наклона 5 транспортера, благодаря чему датчик погонной нагрузки устройства может быть установлен на транспортере роторной стрелы экскаватора в непосредственной близости от роторного колеса, и время запаздывания в определении текущего значения производительности сведено к минимуму.На чертеже приведена схема описываемого устройства.Измерительная роликоопора 1 опираетсяна датчик 2 погонной нагрузки транспортера 3 роторной стрелы экскаватора. В качестве датчика 2 используется силоизмерительный элемент, например, тензометрического типа, выход которого совместно с выходом формирователя 4 сигнала обратной связи образует контур сравнения, соединенный со входом усилителя б автокомпенсационной системы, Электродвигатель б системы, подключенный к выходу усилителя 5, кинематически связан с формирователем 4 и потенциометром 7.В цепь питания формирователя 4 сигналаобратной связи автокомпенсационной системы включен синусно-косинусныи вращающийся трансформатор 8, кинематически связанный с З 0 датчиком 9 (например, маятникового типа)угля 1 гаклоня роторной стрелы экскаватора. (ГОмотк 11 статора трЯнсформатора 8 подключены к источнику 10 питания устройства, а косинусная обмотка ротора соединена со входом фОрыировятеля 4. Вход потенциометря 7 через выпрямитель 11 соединен с датчиком 12 скорости движения транспортера 3. В качестве датчика 12 используется тахогенератор, например, индукторного типа, кинематически связанный с одним из ведомых барабанов транспортера.К выходу потенциометра 7 подключены интегратор 13, регистрирующий прибор 14, цепь 15 выходного сигнала устройства и узел контроля. Последний содержит задатчик 16, соединеннлый с источником 17 опорного напряжения, вентиль 18 и исполнительный эле. мент, например реле 19, управляющий цепью 20 световой и звуковой сигнализации и цепью 21 защиты экскаватора от перегрузок,При работе роторпого экскаватора выходное напряжение датчика 2, пропорциональное текущему значению погонной нагрузки р(1) транспортера роторной стрелы, измеряется автокомпенсационной системой путем уравновешивания напряжением формирователя 4 сигнала обратной связи,В результате действия синусно-косинусного вращающегося трансформатора 8, связанного с датчиком 9 угла у(1) наклона роторной стрелы и включенного в цепь питания формирователя 4, в устройстве осуществляется автоматическое деление выходного сигнала датчика погонной нагрузки на косинус угла наклона роторной стрелы. Произведение полученной величины и текущего значения скорости о(1) движен 11 я транспортера роторной стрелы определяется с помощью датчика 12 и потенциометра 7.Таким образом, выходное напряжение устройства (цепь 15) и показания прибора 14 пропорциональны текущему значению весовой производительности(1) Р И)дсоь; (8) а показания интегратора 13 соответствуют весовой выработке роторного экскаватора1, р . осоя; (1)где (1 - 11) - время работы экскаватора.При увеличении весовой производительности экскаватора сверх допустимого значения, установленного задатчиком 1 б, происходит 10 отпирание вентиля 18 и срабатывание средствсигнализации и защиты от перегрузок наиболее напряженных узлов и систем роторного комплекса (роторная стрела и транспортерная система экскаватора, отвалообразова тель).Благодаря уменьшению времени запаздывания в определении текущего значения весовой производительности экскаватора выходное напряжение устройства может быть 20 использовано в качестве сигнала обратнойсвязи при автоматическом регулировании и стабилизации весовой производительности роторного экскаватора. 25 Предмет изобретенияВычислительное устройство для автоматического определения и контроля режима работы роторного экскаватора, содержащее дат- ЗО чики, преобразующие погонную нагрузку искорость движения транспортерной системы экскаватора в электрический сигнал, и авто- компенсационную систему измерения сигнала датчика погонной нагрузки, отличающееся З 5 тем, что, с целью уменьшения времени запаздывания в определении текущего значения.производительности экскаватора, в цепь питания элемента, формирующего сигнал обратной связи автокомпенсационной системы, 40 включен синусно-косинусный вращающийсятрансформатор, обмотки статора которого подключены к источнику питания, косинусная обмотка ротора соединена с формирователем сигнала обратной связи, а ротор кинематиче ски связан с механическим датчиком угланаклона транспортера.графин, пр. Сапунова,Заказ 252 ЦНИИПИ 1 Тираж 2600 Формат бум. 60)(90 Чв Объем 0,24 изд. л.омитета по делам изобретений и открытий при Совете МиниМосква, Центр, пр, Серова, д, 4 одписно в СССР
СмотретьЗаявка
824610
Н. М. Рудный, Л. А. Верещагин, В. С. Яценко, П. С. Кузнецов
МПК / Метки
Метки: вычислительное, работы, режима, роторного
Опубликовано: 01.01.1966
Код ссылки
<a href="https://patents.su/3-184534-vychislitelnoe-ustrojjstvo-dlya-avtomaticheskogo-opredeleniya-i-kontrolya-rezhima-raboty-rotornogo.html" target="_blank" rel="follow" title="База патентов СССР">Вычислительное устройство для автоматического определения и контроля режима работы роторного</a>
Устройство для измерения в роторных экскаваторах толщины стружки с указателем для выбора ее оптимального значения

Номер патента: 140754
Опубликовано: 01.01.1961
Автор: Чудновский
МПК: E02F 3/26, E02F 9/20, F16H 15/08
Метки: выбора, значения, оптимального, роторных, стружки, толщины, указателем, экскаваторах
...стрелочного указателя толщины срезаемой стружки и прибора, вычисляющего ширину; срезаемой ковшом ротора стружки.Срезание стружки в роторцых экскаваторах с простой стрелой 3 происходит при перемещении тележки 7 подачи с одновременным изме нением угла наклона стрелы 3 к горизонту. Сельсин-датчик 2, связанный с зубчатым сектором 8 стрелы 3, при изменении ее угла наклона передает сельсину-приемнику 4 сигналы, в результате чего начинают вращаться выходной вал 9 сельсина-приемника 4 и связанный с ним упругой муфтой 10 винт 11. Перемещающаяся по винту 11 гайка 12 посредством вилки 13 перемещает по шлицевому валу 14 фрикционный диск 15 передачи 1, изменяя ее передаточное отношение. Передвижение тележки 7 подачи вызывает вращение зубчатого колеса...
Устройство контроля весовой производительности транспортера

Номер патента: 892224
Опубликовано: 23.12.1981
Авторы: Вардпатрикян, Гаприндашвили
МПК: G01G 11/14
Метки: весовой, производительности, транспортера
...1, датчик 2 веса, преобразователь 3, блок 4 умножения, задатчик 5,сумматор 6, дополнительный блок 7умножения, эадатчик 8, дополнительныйпреобразователь 9, датчик 10 активной мощности привода 11 транспортера 1,Устройство работает следующим образом.При транспортировке материала ленточным транспортером 1 усилие массыматериала, находящегося на ленте,преобразуется датчиком 2 веса и преобразователем 3 в электрический сигнал, пропорциональный мгновеннои про-,изводительности, В этот же момент расходуется активная мощность приводом11, также пропорциональная весу транспортируемого материала. Активная мощность измеряется датчиком .10 сигналс которого поступает на преобразователь 9, где преобразуется согласнозависимости .потребляемой...
Устройство для контроля весовой производительности подъемника

Номер патента: 705270
Опубликовано: 25.12.1979
Авторы: Гадзалов, Емельяненко, Комаров, Малоземов
МПК: G01G 19/18
Метки: весовой, подъемника, производительности
...выПервичный измерйтель 1 весовой.на-. дается разрешение "3." на первый входгрузки в представленном варианте испол- трехвходового ключа 13, подготавливаяненйя"вййолнен в виде"датчика чаСтоты начало отсчета фактической разности пе роторного тока электродвигателя 7 подь рйодов роторного тока, Второй вход кщоема, состоящего из шунтв 8, усилителя- ча 19 соедйнен с выходом генератора 17ограничителя 9, триггера Шмитга 10 и . эталонных импульсов. Ключ 19 не даетдиодно-емкостного ключа 11.разрешение на прохождение импульсов отВторичный измерительный прибор 2 вы- генератора 17 на вход суммирующегополнен в виде преобразователя частоты ро счетчика 3 до момента прихода разрешаИрйЖотокаЬчисло эталонных импуль юЩего потенпивла 1 на его третий...
Устройство управления транспортером

Номер патента: 707864
Опубликовано: 05.01.1980
Автор: Киляков
МПК: B65G 43/00
Метки: транспортером
...контакт 10 реле 7 и размыкающий контакт ,1 элемента ввода сигналов подсоединено к источнику питания.Это же реле через последовательно 45соединенные размыкающий контакт 4 пускателя 3 и замыкающий контакт 12реле 11 также подсоединено к источнику питания. Обмотки реле 7 и звукового сигнализатора 6 соединены параллельно и через параллельно подключен-ные замыкающий контакт 2 элементаввода сигналов и замыкающий контакт9 реле 7 соединены с замыкающим кон"тактом 12 реле 11. При подаче на схему напряжения реле 11 получает питание через цепь контактов 10 и 1, срабатывает и самоблокируется через цепь контактов . 4 и 12.При нечетном (первом, третьем и тд) воздействии на контакт 2 элемента ввода сигналов получают питание сигналиэатор б и реле 7....
Устройство управления механизмом подачи рабочего органа роторного экскаватора

Номер патента: 1093759
Опубликовано: 23.05.1984
Автор: Шолтыш
МПК: E02F 3/26
Метки: механизмом, органа, подачи, рабочего, роторного, экскаватора
...задания.Целью изобретения является повышениеточности управления рабочим органом роторного экскаватора.Эта цель достигается тем, что в устройстве управления механизмом подачи рабочего органа роторного экскаватора, содер: 15 жащее задатчик подачи, подключенный кблоку вычитания, датчик скорости, подключенный к квадратору и нуль-орган, подключенный к первому входу регулятора скорости исполнительного электропривода, дополнительно введены интегратор, блок деления и элемент сравнения, а выходы квадратора и блока вычитания подключены к соответствующим входам блока. деления, выход которого подключен к первым входам элемента сравнения и нуль-органа, к вторым входам которых подключен источник питания, при этом выход элемента сравнения...
Предыдущий патент: Перфорирующее устройство
Следующий патент: Способ преобразования сигнала для измерения интегральной среднеквадратичной ошибки
Случайный патент: Способ включения и выключения заготовок в нагревательную цепь многопозиционной