Способ динамических испытаний роторов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
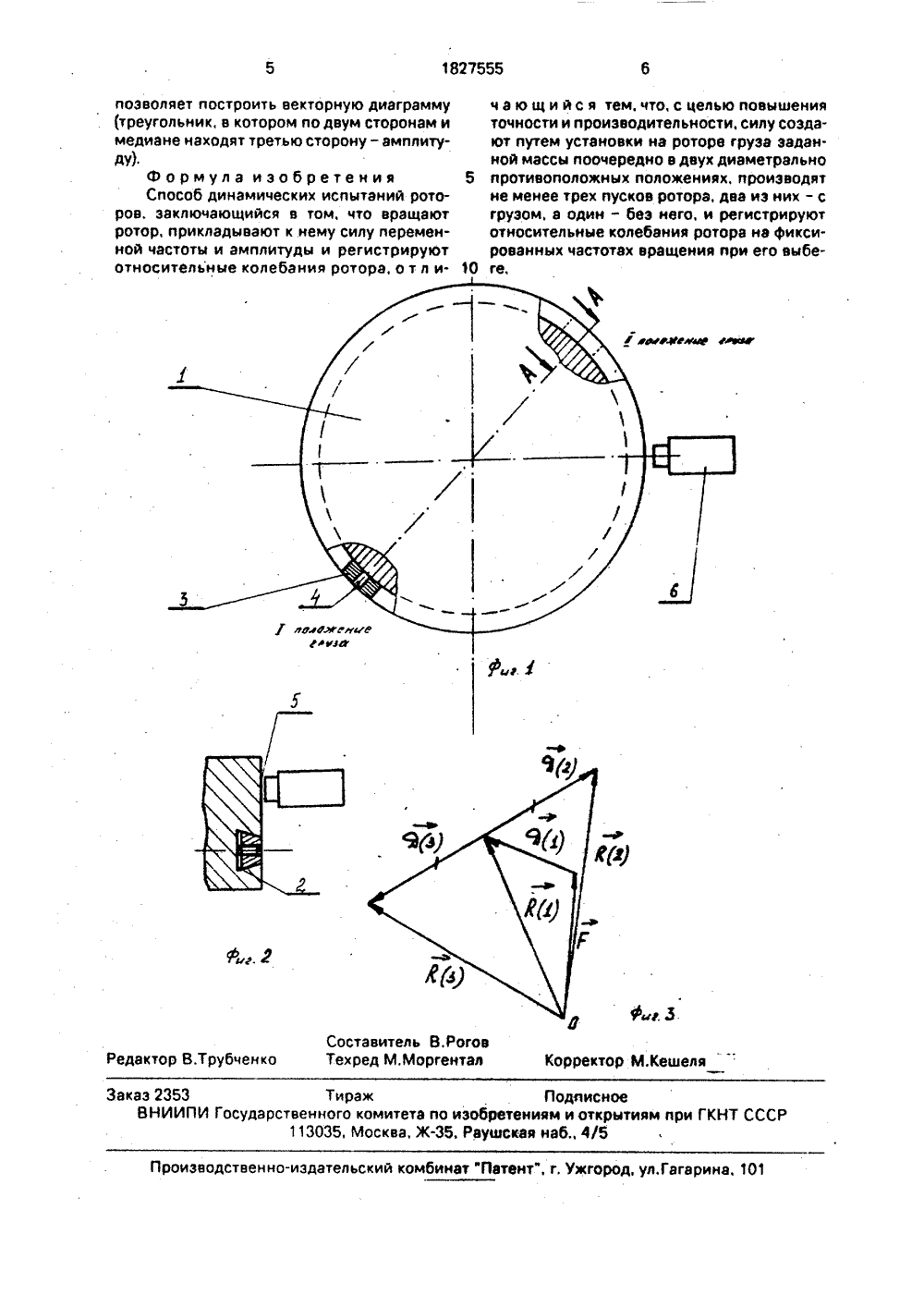
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК ц 5 001 М 1/ БРЕТЕ ОП ЕЛЬСТВУ ов им. Патри-,нко и В.А,Рогов Бесконтактный р для определеристик станков.антов УДН, М.: ЕСКИХ ИСПЫТА(54) СПОСОБ ДИННИЙ РОТОРОВ нные амплитуозначим зафиксиебаний; ГОСУДАРСТВЕННОЕ ПАТЕНТВЕДОМСТВО СССР(71) Университет дружбы нарса Лумумбы(56) Гудименко Н,Н и др,электромагнитный вибратония динамических характеСб. научных трудов аспир1972. вып.12, с,95. Изобретение относится к машиностроению и может быть использовано для экспериментальной оценки динамического качества станков и других машин,Цель изобретения - повышение точности и производительности динамических испытаний,На фиг.1 представлен общий вид ротора: на фиг.2 - разрез А-А на фиг.1; на фиг.3 - векторная диаграмма сил.Испытуемый ротор 1 содержит установленный в кольцевом пазу 2 дебалансный груз 3, зафиксированный в определенном положении винтом 4 и ответную поверхность 5,с которой взаимодействует бесконтактный датчик 6 относительных колебаний, связанный проводами с контрольно-измерительной аппаратурой и ЭВМ,Способ реализуется следующим образом,Заготовка (не показана) закрепляется на роторе 1, включается привод(не показан) ротора 1, который разгоняет последний до Ы 1822555 А 1(57) Изобретение относится к машиностроению. 8 способе переменная сила создается путем установки на роторе груза фиксированной массы поочередно в двух диаметрально расположенных и равноудаленных от оси вращения положениях, производят три пуска ротора, причем два из них с грузом, а один - без него, и в процессе выбега производят измерения перемещений ротора на фиксированных частотах, причем количество фиксированных частот Й выбирают в зависимости от числа степеней свободы п. динамической модели, принятых к рассмотрению, по формуле й 2 п+1. 3 ил,максимальной частоты вращения и затем отключается. На выбеге ротора 1 производится измерение. амплитуд на й различных фиксированных частотах.Ротор 1 затормаживают и устанавливают груз в кольцевой паз 2 на отметке 0 (1 положение), закрепляют его винтом 4, Масса груза заранее известна. Включается привод, и ротор 1 разгоняется до максимальной частоты вращения, На выбеге ротора 1(свободное вращение) производятся измерения амплитуд колебаний на тех же фиксированных Й частотах. Далее ротор 1 затормаживают и переставляют груз 3 в диаметрально противоположное положение (на 180), закрепляют винтом 4, включают привод и разгоняют ротор 1 до максимальной частоты вращения, На выбеге ротора 1 датчиком 6 замеряют амплитуду колебаний на укаэанных фиксированных частотах,Об рова(1) = гс 1- ЧЧ (1) Х) (3) 3) й (1, 1) (1-1,21 ч) (пуск без дебалансного груза)й (2, 1)(1-1,2 И) (пуск с грузом в точке 0 г) В(3, 1)(1-1,2 й) (пуск с грузом в точке 180) Рассмотрим векторную диаграмму действующих сил и соответствующих им перемещений шпинделя относительно шпиндельной бабки для какой-нибудь 1-ой частоты (см.фиг.З).Модуль вектора перемещений, вызванного центробежной силой балансировочного груза, для каждой из И фиксированных частот, может быть вычислен по известной формуле, связывающей величины сторон и медианы косоугольного треугольника 1 С 1(2,1)40(3,1) "/О,Ф(2,1)1 +О,ЯЗВ-П 1,1)(1) где ф 2,1)1, ДЗ,Я - модули векторов перемещений, вызванных центробежными силами дебалансных грузов;й - номер фиксированной частоты.В теории колебаний известны формулы для определения динамических перемещений упруго подвешенной массы при синусоидальном силовом воздействии. Для одномассовой динамической системы можно записать ЧЧХр(ЕР - ЧЧ (1)") + (:) ЧЧ (1)К где Х(1) - динамическая податливость на 1-йчастоте, Хо - статическая податливость,мкмlН, Яг - собственная частота колебаний,ЧЧ(1) - фиксированная частотаГц.9- логарифмический декремент колебаний,Для одномассовой системы достаточно провести измерения на трех фиксированных частотах. Учитывая, что перемещения пропорциональны действующим силам, проведем почленное деление выражений по формуле 2 и возведем в квадрат левые и правые части полученных выражений. щ (94 - аг+(-а(г а 1(2)- ЧЧ (3+ ( ЧЧ (3)4 В полученной системе 3 неизвестны двевеличины: собственная частота колебаний ротора ЧЧг и логарифмический декремент колебаний О.5 Величины ЧЧ(1), ЧЧ(2) и ЧЧ(3) берутся порезультатам тарировки резонансных фильтров, а 0(1), 0(2) и 0(3) вычисляются по экспериментальным данным по формуле (1), причем размерность их не имеет значения 10 (мкм, мВ, и др,), так как левая часть уравнения системы (3) безмерна, Решаем систему 3 способом итераций Ньютона.Затем вычисляется амплитуда переменной силы Гя, вызываемой дебалансным гру зом массой ац Гг) - ,В 1 Н, 1=,г,г 4 где й - расстояние от центра массы дебалансного груза до оси вращения ротора, м,ЧЧ(1) - фиксированная частота измерения, Гц.Преобразуем вычисленные по формуле 25 (1) значения 0(1) в линейные величины, например, в мкм по формуле Зч где Х(1) - амплитуда динамических перемещений на 1-й частоте, мкм;К(1) - коэффициент передачи 1-го каналаизмерительной системы, мкмlмВ.Из формулы (2) можно теперь опреде лить статическую податливость динамической системы Х, причем вычисления можно сделать для всех трех частот и определить результат340 Хо - ,),Х (1) хЗЧЧЬ = 45 Затем, воспользовавшись формулой (2),можно рассчитать динамическую податливость ротора в интересующем нас частотном диапазоне, а также углы фазовых сдвигов по формуле50 Все расчеты и графики осуществляются на ЭВМ. По сравнению с прототипом точность увеличивается в 5 раз, время - в 40 раз, При измерениях производится три пуска - это минимальное число пусков, котороеТираж ПодписноеГосударственного комитета по изобретениям и открытиям при ГКНТ С 113035, Москва, Ж, Раушская наб., 4/5 изводственно-издательский комбинат "Патент", г. Ужгород, ул,Гагарина, 10 позволяет построить векторную диаграмму (треугольник, в котором по двум сторонам и медиане находят третью сторону - амплитуду).Формула изобретения 5 Способ динамических испытаний роторов. заключающийся в том, что вращают ротор, прикладывают к нему силу переменной частоты и амплитуды и регистрируют относительные колебания ротора, о т л и ч а ю щ и й с я тем, что, с целью повышения точности и производительности. силу создают путем установки на роторе груза заданной массы поочередно в двух диаметрально противоположных положениях, производят не менее трех пусков ротора, два из них - с грузом. э один - без него, и регистрируют относительные колебания ротора на фиксированных частотах вращения при его выбеге,
СмотретьЗаявка
4935371, 12.05.1991
УНИВЕРСИТЕТ ДРУЖБЫ НАРОДОВ ИМ. ПАТРИСА ЛУМУМБЫ
ПОЗНЯК ГЕОРГИЙ ГРИГОРЬЕВИЧ, ГУДИМЕНКО НИКОЛАЙ НИКОЛАЕВИЧ, РОГОВ ВЛАДИМИР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G01M 1/00
Метки: динамических, испытаний, роторов
Опубликовано: 15.07.1993
Код ссылки
<a href="https://patents.su/3-1827555-sposob-dinamicheskikh-ispytanijj-rotorov.html" target="_blank" rel="follow" title="База патентов СССР">Способ динамических испытаний роторов</a>
Система регулирования частоты вращения ротора паровой турбины

Номер патента: 658301
Опубликовано: 25.04.1979
Автор: Альбицкий
МПК: F01D 17/26
Метки: вращения, паровой, ротора, турбины, частоты
...окон 17 и 10 в корпусе 16 золотника 8 таково, что при ходе золотника 8 вниз открытие окна7 и сообщение камеры 23 с дополнительным подводом через окно 17 совпадает с полным закрытием окна 10 на слив из камеры 23. Изменение расхода пара через турбину перемещением сервомотора 15 при номинальной частоте вращения производится перемешением буксы 1.Так смещение буксы 1 вверх вызывает временное увеличение подвода через шайбу 4 в камеру 22, которое приводит к перемещению поршня 12 вместе с золотником 13 из положения отсечки золотника 13 вверх до тех пор, пока дроссель самовыключения 14, прикрываясь, не восстановит подвод в линию 11 до первоначальной величины. Смешение золотника 13 из положения отсечки вверх вызывает перемещение сервомотора 15...
Устройство для регулирования частоты вращения асинхронного двигателя с фазным ротором

Номер патента: 712919
Опубликовано: 30.01.1980
Авторы: Довбня, Дробышев, Марков, Хадасевич, Цвирко
МПК: H02P 7/64
Метки: асинхронного, вращения, двигателя, ротором, фазным, частоты
...коммутатор, подключенный к выходу магнитного усилителя,Работа устройства поясняется чертежом.Статор 1 асинхронного двигателя подключен к источнику переменного тока, а обмотка ротора 2 выводами 3, 4, 5 соединена со входом магнитного усилителя 6, выполненного из силовых обмоток 7 - 12 и вентилей 13 - 18, включенных в плечи трехфазной мостовой схемы магнитного усилителя с самонасыщением 6. К выходным выводам 19, 20 магнитного усилителя 6 подключен коммутатор 21. Устройство содержит обмотки управления 22 магнитного усилителя 6.Работает устройство следующим образом.Коммутатор 21 коммутирует выпрямленный ток ротора 2 с заданной частотой и скважностью. Через обмотки 7 - 12 и вентили 13 - 18 магнитного усилителя 6 протекают токи,...
Устройство для регулирования частоты вращения асинхронного двигателя с фазным ротором

Номер патента: 718877
Опубликовано: 29.02.1980
Авторы: Довбня, Дробышев, Марков, Хадасевич, Цвирко
МПК: H02P 7/36
Метки: асинхронного, вращения, двигателя, ротором, фазным, частоты
...резисторам 7, 8 и силовым обмоткам 9, 10 магнитного усилителя включены вентили 11, 12, катоды которых соединены с анодами тиристоров 5 и 6 и с обкладками конденсатора 13. Устройство содержит обмотки управления 14 магнитного усилителя и управляемый мультивибратор 15, выходы которого соединены с управляющими электродами тиристоров 5 и 6,Работает устройство следующим образом.Мультивибратор 15 работает в автоколебательном режиме с заданйой частотой и постоянной скважностью. При поступлении от мультивибратора 15 на управляющий электрод тиристора 5 импульса последний отпирается. Через обмотку 9 магнитного усилителя и резистор 7, вентиль 11 и открытый тиристор 5 в течении одного полу- периода коммутации протекает выпрямленный ток...
Стенд для контроля частоты вращения ротора фильтра центробежной очистки масла

Номер патента: 718722
Опубликовано: 29.02.1980
Авторы: Воргунов, Леонтьев, Свистков
МПК: G01H 1/06
Метки: вращения, масла, ротора, стенд, фильтра, центробежной, частоты
...в зоне выброса очищенного масла фильтра.На чертеже изображсн стенд, общий вид, Стенд для контроля частоты вращения 25 ротора фильтра 1 центробежной очистки масла содерткит плиту 2 с узлами 3 фиксации фильтра 1 и датчик 4 частоты вращения фильтра 1, установленный на плите 2 и взаимодействующий с фильтром. Датчик 4 3,выполнен в впдс вцбропрсобразователя, например пьсзоэлсмсцта, установлен па штоке 5 силового цилнндра 6, размещаемого в зоцс выброса очищенного масла фильтра, и подключен к регистратору 7.Контроль частоты вращсшя ротора па стсцдс осуществляется следующим образом, Фильтр 1 в сборе устанавливается на плиту 2 и закрепляется. Шток 5 с датчиком 4 подастс 51 силовым нилицдром 6 ь зону выОроса очищенного ъасла, Подогретое...
Устройство для двухзонного регулирования частоты вращения асинхронного двигателя с фазным ротором

Номер патента: 720651
Опубликовано: 05.03.1980
МПК: H02P 5/34
Метки: асинхронного, вращения, двигателя, двухзонного, ротором, фазным, частоты
...основная обмотка датчика скольжения, а к другому - выход автономногоисточника частоты.На чертеже представлена структурная схема предложенного устройства двухзонного регулирования частоты вращения.Устройство состоит из асинхронного двигателя 1 с фазным ротором, датчика скольжения 2 с двумя трехфазными обмотками, источника 3 питания, автономного источника 4 частоты, инвертора 5, бескойтактного переключающего устройства 6, нуль-органа зо 7, управляемого выпрямителя 8.Работает устройство следующим образом.При подходе ротора асинхронного двигателя 1 к зоне нечувствительности, что соответствует скольжению 3 - 5%, трехфазная дополнительная обмотка датчика скольжения 2 переключается с источника 3 питания асинхронного двигателя на...
Предыдущий патент: Светопровод к цветовому пирометру для измерения температуры продуктов взрывчатого превращения в замкнутом объеме
Следующий патент: Способ контроля герметичности изделий
Случайный патент: Циновальный станок