Измеритель положения геометрической оси датчика
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
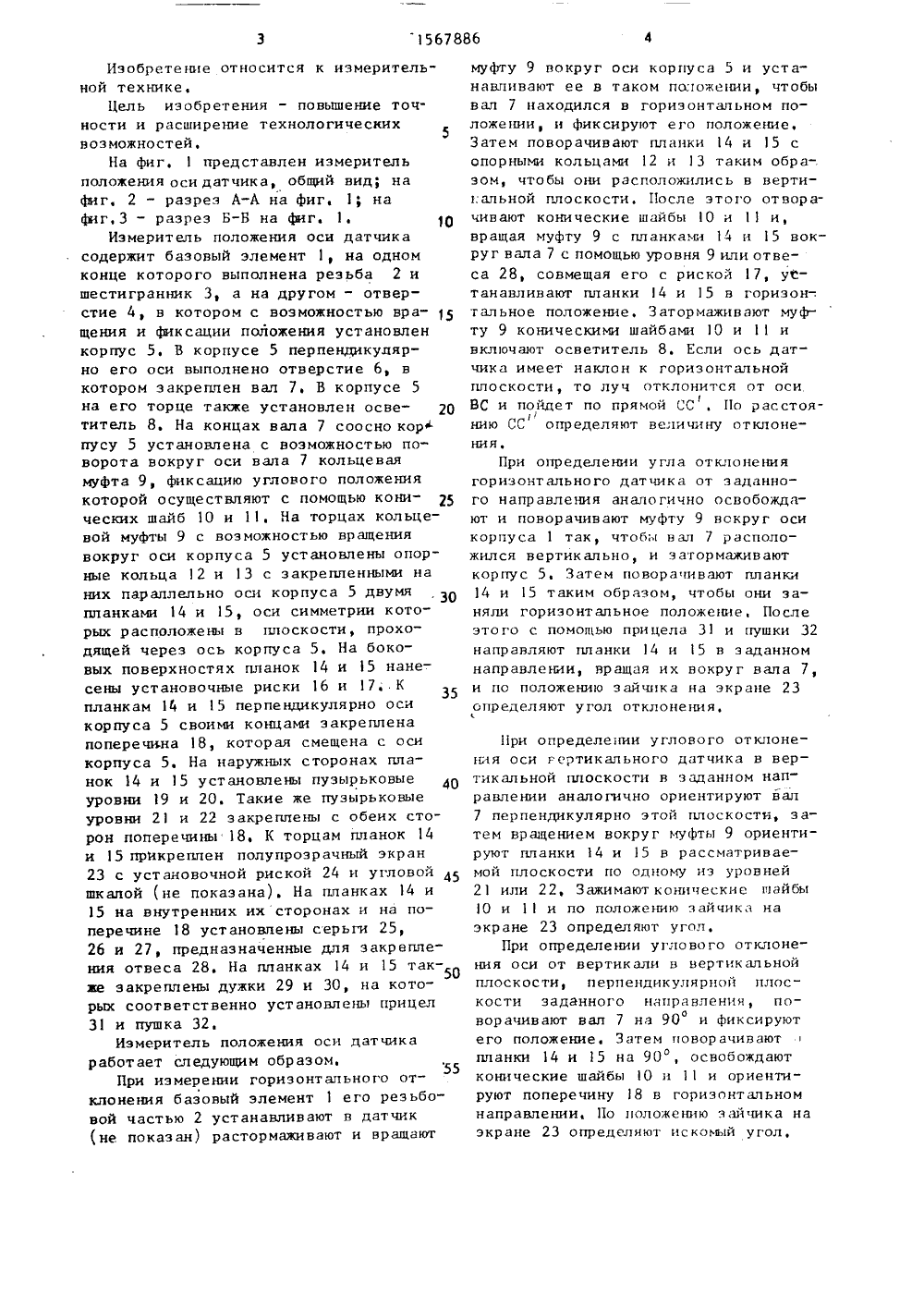
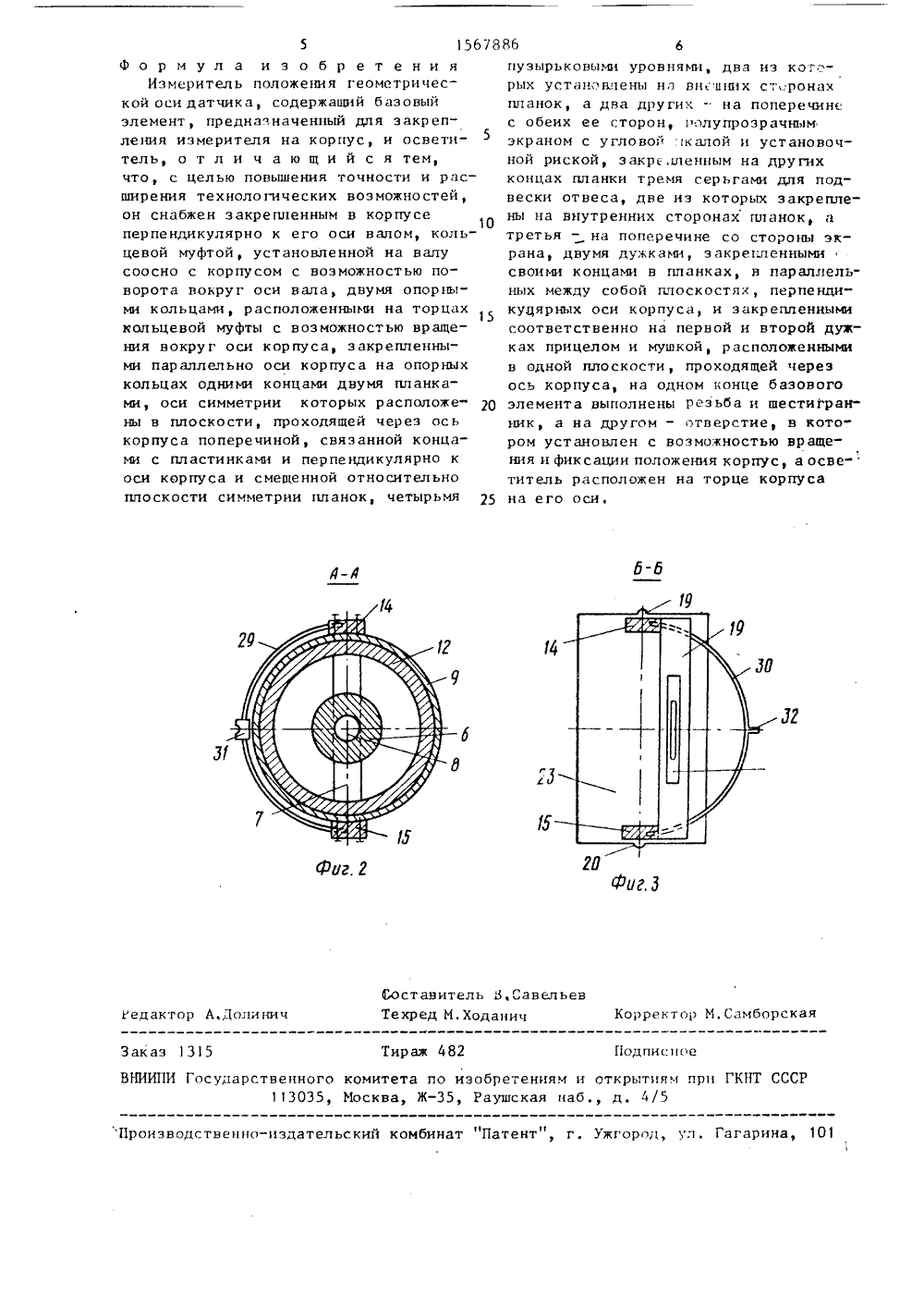
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК 19 (И 01 В 21/О Г 5 ОПИСАНИЕ ИЗОБРЕТЕНИ 5лель.1 ГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(56) Авторское свидетельство СССРУ 1229572, кл, С 01 В 21/00, 1986.(54) ИЗМЕРИТЕЛЬ ПОЛОЖЕНИЯ ГЕОМЕТРИЧЕСКОЙ ОСИ ДАТЧИКА(57) Изобретение относится к измерительной технике, Цель изобретенияповышение точности и расширение технологических возможностей, Измерительположения содержит базовый элементна одном конце которого выполненарезьба 2 и шестигранник 3, а на другом - отверстие 4, корпус 5, опоркекольца 12 и 13 и пузырьковые уровни19, 20, 21 и 22. При измерении, на-пример, горизонтального отклонения реперныи элемент 1 устанавливают вдатчике и вращают кольцевую муфту 9,расположенную на валу 7, с возможностью поворота вокруг его оси и устанавливают в таком положении, что вал находился в горизонтальном положении.Затем поворачивают планки 14 и 1закрепленные одними концами парално оси корпуса 5 на опорных кольцах2 и 13 таким образом, чтобы они располагались в вертикальной ппоскости.После этого вращают муфту 9 вокругоси вала 7 и устанавливают планки 14и 15 в горизонтальное положение. Включают осветитель 8, расположенный наторце корпуса 5 на его оси, и по положению зайчика на полупрозрачном экране 23 с угловой шкалой и установочной риской 24, закрепленным на другихконцах планок 14 и 15, определяютугол отклонения3 ил.Иэобретее относится к измерительной технике,Цель изобретения - повышение точности и расширение технологическихвозможностей,На фиг, 1 представлен измерительположения оси датчика, общий вид; нафиг, 2 - разрез А-А на фиг, 1; нафиг,3 - разрез Б-Б на фиг. 1, 10Измеритель положения оси датчикасодержит базовый элемент 1, на одномконце которого выполнена резьба 2 ишестигранник 3, а на другом - отверстие 4, в котором с воэможностью вращения и фиксации положения установленкорпус 5, В корпусе 5 перпендикулярно его оси выполнено отверстие 6, вкотором закреплен вап 7, В корпусе 5на его торце также устанонлен оснетитель 8. На концах вала 7 соосно корпусу 5 установлена с возможностью поворота нокруг оси вала 7 кольцеваямуфта 9, фиксацию углового положениякоторой осуществляют с помощью конических шайб 10 и 11. Ча торцах кольцевой муфты 9 с воэможностью вращениявокруг оси корпуса 5 установлены опорные кольца 12 и 13 с закрепленными наних параллельно оси корпуса 5 двумяпланками 14 и 15, оси симметрии которых расположены в плоскости, проходящей через ось корпуса 5. На боковых поверхностях планок 14 и 15 нанесены установочные риски 16 и 17 Кпланкам 14 и 15 перпендикулярно осикорпуса 5 своими концами закрепленапоперечина 18, которая смещена с осикорпуса 5. На наружных сторонах планок 14 и 5 установлены пузырьковые 40уровни 19 и 20. Такие же пузырьковыеуровни 21 и 22 закреплены с обеих сторон поперечины 18, К торцам планок 14и 15 прикреплен полупрозрачный экран23 с установочной риской 24 и угловой 45шкалой (не показана). На планках 14 и15 на внутренних их сторонах и на поперечине 18 установлены серьги 25,26 и 27, предназначенные для эакрвппения отвеса 28. На ппанках 14 и 15 также закреплены дужки 29 и 30, на которых соответственно установлены прицел31 и пушка 32,Измеритель положения оси датчикаработает следующим образом,При измерении горизонтального отклонения базовый элемент 1 его реэьбовой частью 2 устанавливают н датчик(не показан) растормажинают и вращают муфту 9 вокруг оси корпуса 5 и устанавливают ее в таком по:ожении чтобывал 7 находился н горизонтальном положении, и фиксируют его положение,Затем поворачивают планки 14 и 15 сопорными кольцами 12 и 13 таким обра-,зом чтобы они расположились н вертикальной плоскости. После этого отворачивают конические шайбы 10 и 11 и,вращая муфту 9 с планками 14 и 15 вокруг вала 7 с помощью уровня 9 или отвеса 28, совмещая его с риской 7, устананлинают планки 14 и 15 в горизон-.тальное положение. Затормаживают муфту 9 коническими шайбами 10 и 11 ивключают осветитель 8, Если ось датчика имеет наклон к горизонтальнойплоскости, то луч отклонится от осиВС и пойдет по прямой СС, По расстоянию СС определяют веиину отклонения,При определении угла отклонениягоризонтального датчика от заданного направления аналогично освобождают и поворачивают муфту 9 вокруг осикорпуса 1 так, чтобы н ал 7 расположился вертикально, и затормаживаюткорпус 5, Затем поворачивают планки14 и 15 таким образом, чтобы они заняли горизонтальное положее, Послеэтого с помощью прицела 31 и пушки 32направляют планки 14 и 15 н эаданномнаправлеными вращая их вокруг вала 7,и по положению зайнка на экране 23определяют угол отклоея,При определении углового отклонеыя оси гертикального датчика в вертикальной плоскости н заданном направлении аналогично ориентируют вап7 перпендикулярно этой плоскости, затем вращением вокруг муфты 9 ориентируют планки 4 и 15 н рассматриваемой плоскости по одному из уронней21 или 22, Зажимают конические шайбы10 и 11 и по положению зайчик наэкране 23 определяют угол,При определении углового отклонения оси от вертикали н вертикальнойплоскости, перпендикулярной плоскости заданного направления, псаворачивают нап 7 на 90 и фиксируютего положение, Затем поворачиваютпланки 14 и 15 на 90 освобождаютконические шайбы 0 и 11 и ориентируют поперечину 18 н горизонтальномнаправлении, По оложеию зайчика наэкране 23 определяют искомый угол,1567886 на его оси. фиг. Я Составитель В,Савельев ехред М,Ходанич едактор А,Долинич Т Корректор М.Самборск Тираж 482митета по изобретениям и отсква, Ж, Раушская наб.,Заказ 1315 Подписи ытиям при ГКНТ СССР ВНИИПИ Государственного113035,оизводственно-издательский комбинат "Патент", г. ужгород, ул. Гагарина, 10 формула изобретенияИзмеритель положения геометрической оси датчика, содержащий базовый элемент, предназначенный для закрепления измерителя на корпус, и осветитель, о т л и ч а ю щ и й с я тем что, с целью повышения точности и расширения технологических возможностейон снабжен закрепленным в корпусе перпендикулярно к его оси валом, кольцевой муфтой, установленной на валу соосно с корпусом с возможностью поворота вокруг оси вапа, двумя опорными кольцами, Расположенными на торцах 15 кольцевой муфты с возможностью вращения вокруг оси корпуса, закрепленными параллельно оси корпуса на опорных кольцах одними концами двумя планками, оси симметрии которых расположены в плоскости проходящей через ось корпуса поперечиной, связанной концами с пластинками и перпендикулярно к оси корпуса и смещенной относительно ппоскости симметрии планок, четырьмя 25 пузырьковыми уровнями, два из которых установлены на вн вник ст ронахппанок а два других - на поперечинес обеих ее сторон, 1 олупрозрачнымэкраном с угловой капой и установочной риской, эакре,ленным на другихконцах планки тремя серьгами для подвески отвеса, две из которых закреплены на внутренних сторонах планок, атретья - на поперечине со стороны экрана, двумя дужками, з акреленнымисвоими концами в планках в параллельных между собой плоскостях, перпендикуцярных оси корпуса, и закрепленнымисоответственно на первой и второй дужках прицелом и мушкой, расположеннымив одной плоскости, проходящей черезось корпуса, на одном конце базовогоэлемента выполнены Резьба и шестигранник, а на другом - отверстие, в котором установлен с возможностью вращения и фиксации положения корпус, а осве-титель расположен на торце корпуса
СмотретьЗаявка
4438145, 09.06.1988
ВОЙСКОВАЯ ЧАСТЬ 44526
КУЗНЕЦОВ ЕВГЕНИЙ АНАТОЛЬЕВИЧ, ЧУНИХИН ЕВГЕНИЙ МИХАЙЛОВИЧ, ЯШИН СЕРГЕЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G01B 21/00
Метки: геометрической, датчика, измеритель, оси, положения
Опубликовано: 30.05.1990
Код ссылки
<a href="https://patents.su/3-1567886-izmeritel-polozheniya-geometricheskojj-osi-datchika.html" target="_blank" rel="follow" title="База патентов СССР">Измеритель положения геометрической оси датчика</a>
Датчик положения

Номер патента: 486215
Опубликовано: 30.09.1975
Авторы: Иванов, Николаев, Чайка
МПК: G01B 7/30
...инИзобретение относится к области измерительной техники, в частности оно может бытьиспользовано в качестве датчика положениярегулирующего органа (кассеты) приводасистемы управления и защиты ядерного реактора, В области автоматики и телемеханикии в других областях,Известны индукционные датчики, содержагцие подвпткный ротор с магпитопроводягцимсекторным выступом, вторичные обмотки, рас зположенные на стержнях магнптопровода,размещенных вокруг центрального стержнямагнитопровода, на котором расположенапервичная обмотка.Однако при использовании таких устройств 15в качестве датчика положения для повышения точности определения угла поворота ротора необходимо увеличивать габариты датчикаположения, что часто не предоставляется возможньгм по...
Датчик положения ротра вентильного электродвигателя

Номер патента: 633116
Опубликовано: 15.11.1978
МПК: H02K 11/00, H02K 29/06
Метки: вентильного, датчик, положения, ротра, электродвигателя
...положения ротора с ва= 15 лом вентильного электродвигателя. Та" кой датчик положения ротора, являющийся хвостовой машиной, увеличивает осевые габариты вентильного электродвигателя. При этом также возникает 20 препятствие для установки тахогене- ратора, требующего, как известно, наличие свободного конца вала вентильного электродвигателя.Известен также датчик положения 25 ,ротора вентильного электродвигателя, .сочлененного с рабочим механизмом посредством муфты, содержащий ротор, жестко связанный с ротором электродвигателя, и статор, связанный с кор одвигателя элементом кре633116статора датчика положения ротора соответствующие электрические импульсы,подающиеся в блок управления вентилями электродвигателя,При возможном изменении...
Магнитный датчик положения крана

Номер патента: 1127898
Опубликовано: 07.12.1984
МПК: C12G 1/02, G01F 23/00
Метки: датчик, крана, магнитный, положения
...отключающим элементом; на фиг.3конструкция магнитного датчика положения трехходового пробкового крана,разрез; на фиг. 4 - то же, со снятой крьппкой, вид сверху.Магнитный датчик положения крана содержит постоянный магнит 1 с подюсными наконечниками 2, магнитоуправляемый контакт. 3 и отключающий элемент 4, Причем постоянный магнит 1 с полюсными наконечниками 2 и магнитоуправляемый контакт 3 помещены в П-образную обойму 5, прикрепленную винтом 6 к крышкедатчика. В зазор П-образной обоймы 5 введен отключающий элемент 4, выполненный из магнитомягкого материала и прикрепленныйк валу 8 винтом 9. В верхней частивала 8, непосредственно над крыш-кой 7, размещено стопорное кольцо 10,удерживающее вал 8 от осеввго движения в корпусе 11...
Датчик положения главного вала швейной машины

Номер патента: 992631
Опубликовано: 30.01.1983
Автор: Мельянцев
МПК: D05B 69/22
Метки: вала, главного, датчик, положения, швейной
...швейной машины,Предлагаемый датчик состоит из контактных колец 1 (фиг. 1), имеющих электропроводные дорожки с изолированными участками,.залитыми ком" паундом. Кольца установлены на главном валу швейной машины, Пластины токосъема 2 через обойму 3 контактируют с сердечником электромагнита 4, а при работе швейной машины отведейы от дорожек колец пружиной 5, Иикропереключатель(фиг. 2) связан с992631 4металл-металл. На изоляционном компаунде не остается проводящих дорожек, это повышает точность останова главного вала. Контакт при вращении5 длится в пределах 1-2 оборотов валамашины при скорости 180-200 об/мин. а, Это значительно увеличивает срокслужбы датчика и повышает его надежностьформула изобретения РАИФ и 3педалью управления (не...
Способ переноса оси сооружения в вертикальной плоскости от двух осевых точек

Номер патента: 1249334
Опубликовано: 07.08.1986
Автор: Лысов
МПК: G01C 11/00
Метки: вертикальной, двух, осевых, оси, переноса, плоскости, сооружения, точек
...алидаду на 180, берут отсчет а, по шкале 11, установленной в 15 точке 0. Отсчет а можно полуцить также после поворота трубы через зенит при двух положениях вертикального круга (КН и КЛ). Измерив расстояния 8, и сг нитяным дальномером или рулеткой, вычисляют по формуле где со - выцислснный отсчет по шкалам,равный величине смещения прибора относительно створа оси;ос,аг - отсчеты по линейным шкалам, установленным соответственно на первой и второй осевых точках; расстояния от теодолита соответственно до первой и второй 30 шкал, измеренные дальномером или рулеткой, о гсцст ав, равный сменснию теодолита (тоцки С) относительно створа оси 0 О . Браца теодолит, наводят визирную ось трубы на отсчет а на шкале 1 (или 11), устанавливая тем 35...
Предыдущий патент: Устройство для измерения плоских углов
Следующий патент: Устройство для измерения координат угловых точек топологических фигур фотошаблонов
Случайный патент: Способ регулирования процесса выгрузки реакционной массы из реактора