Система управления рабочим процессом вибромашины
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
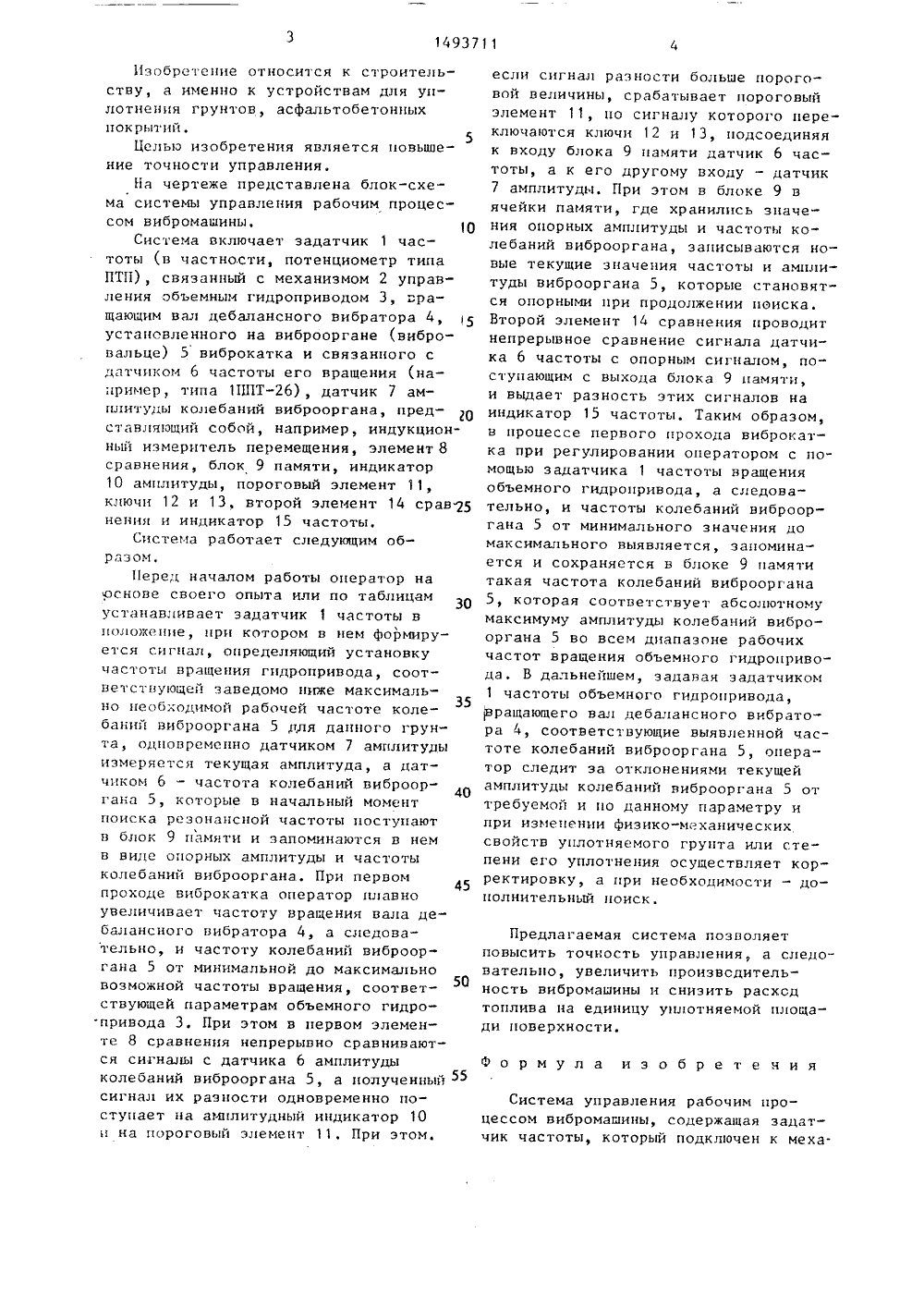
(71) Московское научно-производствное объединение по строительному ирожному маниностроению "ВНИИстройдорман(56) Чемоданов Б.К. Следящие привоМ.: Энергия, 1976, т. 2, с. 250.Пневматический виброкаток РИМА168/168 А. Проспект фирмы АВ С ФРГ1984,ен- доор 1, ия Е ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЭОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ПЛАНТ СССР ОПИСАН ИК АВТОРСКОМ(54) СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ПРОЦЕССОМ ВИБРОМАШИНЫ(57) Изобретение относится к строи.тельству, может быть использованодля уплотнения грунтов, асфальтобетонных покрытий и позволяет повыситьточность управления. Система содержизадатчик 1 частоты, механизм 2 управления объемным гидроприводом 3, вращающий вал дебалансного вибратора 4,установленного на виброоргане (вибровальце) 5 виброкатка, датчик 6 частоты, датчик 7 амплитуды, элемент 8сравнения, блок 9 памяти, индикат10 амплитуды, пороговый элемент 1ключи 12 и 13, элемент 14 сравнени индикатор 15. 1 ил.Изобретение относится к строительству, а именно к устройствам для уплотнения грунтов, асфальтобетоццых покрытий.5Целью изобретения является повышение точности управления.На чертеже представлена блок-схема системы управления рабочим процессом вибромаыины, 1 ОСистема включает задатчик 1 частоты (в частности, потенциометр типа ПТП), связанный с механизмом 2 управления объемным гидроприводом 3, вращающим вал дебалансного вибратора 4, установленного на виброоргане (вибровальце) 5 виброкатка и связанного с датчиком 6 частоты его вращения (например, типа 1 ППТ), датчик 7 амплитуды колебаний виброоргана, пред ставляющий собой, например, индукционный измеритель перемещения, элемент 8 сравнения, блок 9 памяти, индикатор 10 амплитуды, пороговый элемент 11, ключи 12 и 13, второй элемент 14 срав 25 неция и индикатор 15 частоты.Система работает следующим образом,Перед началом работы оператор на основе своего опыта или по таблицам устанавливает задатчик 1 частоты в положение, при котором в цем формируется сигцал, определяющий установку 30 частоты вращения гидропривода, соответствующей заведомо ниже максималь 35 цо необходимой рабочей частоте колебаний виброоргана 5 для данного грунта, одновременно датчиком 7 амплитуды измеряется текущая амплитуда, а датчиком 6 - частота колебаний виброор 40 гака 5, которые в начальный момент поиска резонансной частоты поступают в блок 9 памяти и запоминаются в нем в виде опорных амплитуды и частоты колебаний виброоргана. При первом проходе виброкатка оператор плавно увеличивает частоту вращения вала дебалансного вибратора 4, а следовательно, и частоту колебаний виброоргана 5 от минимальной до максимально возможной частоты вращения, соответ 50 ствующей параметрам объемного гидро- .привода 3. При этом в первом элементе 8 сравнения непрерывно сравниваются сигналы с датчика 6 амплитуды колебаний виброоргана 5, а полученный 55 сигнал их разности одновременно поступает ца амплитудный индикатор 10 и ца пороговый элемент 11. При этом. если сигнал разности больше пороговой величины, срабатывает пороговый элемент 11, цо сигналу которого переключаются ключи 12 и 13, подсоединяя к входу блока 9 памяти датчик 6 частоты, а к его другому входу - датчик 7 амплитуды. При этом в блоке 9 в ячейки памяти, где хранились значения опорных амплитуды и частоты колебаний виброоргана, записываются новые текущие значения частоты и амплитуды виброоргана 5, которые становятся опорными при продолжении поиска. Второй элемент 14 сравнения проводит непрерывное сравнение сигнала датчика 6 частоты с опорным сигналом, поступающим с выхода блока 9 памяти, и выдает разность этих сигналов на индикатор 15 частоты, Таким образом, в проггессе первого прохода виброкатка при регулировании оператором с помощью задатчика 1 частоты вращения объемного гидропривода, а следовательно, и частоты колебаний виброоргана 5 от минимального значения домаксимального выявляется, запоминается и сохраняется в блоке 9 памяти такая частота колебаний виброоргана 5, которая соответствует абсолютному максимуму амплитуды колебаний виброоргана 5 во всем диапазоне рабочих частот вращения объемного гидропривода, В дальнейшем, задавая задатчиком 1 частоты объемного гидроцривода, вращающего вал дебалансного вибратора 4, соответствующие выявленной частоте колебаний виброоргана 5, оператор следит за отклонениями текущей амплитуды колебаний виброоргана 5 от требуемой и по данному параметру и при изменении Физико-механических свойств уплотняемого грунта или степени его уплотнения осуществляет корректировку, а при необходимости - дополнительный поиск.Предлагаемая система позволяет повысить точность управления, а следовательно, увеличить производительность вибромаыины и снизить расход топлива ца единицу уцлотняемой площади поверхности.Ф о р м у л а и з о б р е т е н и яСистема управления рабочим процессом вибромашицы, содержащая задатчик частоты, который подключен к меха1493711 1 О Составитель А.КузнецовТехред Л.Сердюкова Корректор Э.Лончакова Редактор А.Лежнина Заказ 4071/30 Тираж 494 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д, 4/5 Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина, 101 низму управления объемным гидроприводом дебалансного вибратора, которыйустановлен на виброоргане, и индикатор частоты, о т л и ч а ю щ а я с ятем, что, с целью повышения точностиуправления, она снабжена датчикомчастоты вибратора, датчиком амплитуды виброоргана, пороговым, элементом,двумя ключами, блоком памяти, двумяблоками сравнения и индикатором амплитуды, причем датчик амплитуды подключен к первым входам первых ключаи элемента сравнения, выход первого элемента сравнения соединен,с индикатором амплитуды и входом пороговогоэлемента, выход которого соединен свторым входом первого ключа и первымвходом второго ключа, выходы ключейсоединены с соответствующими входамиблока памяти, датчик частоты подключен к второму входу второго ключа ипервому входу второго элемента сравнения, выход которого подключен к индикатору частоты, а вторые входы элементов сравнения соединены с соответствующими выходами блока памяти.
СмотретьЗаявка
4324960, 04.11.1987
МОСКОВСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СТРОИТЕЛЬНОМУ И ДОРОЖНОМУ МАШИНОСТРОЕНИЮ "ВНИИСТРОЙДОРМАШ"
ВАТУЕВ МИХАИЛ АНДРЕЕВИЧ, РУФОВ ВАСИЛИЙ ЕГОРОВИЧ, БАЛАКИРЕВ ВАЛЕРИЙ ЯКОВЛЕВИЧ, МАРТЫНЮК АРТУР ИВАНОВИЧ
МПК / Метки
МПК: E01C 19/28, E01C 19/38, E02D 7/18
Метки: вибромашины, процессом, рабочим
Опубликовано: 15.07.1989
Код ссылки
<a href="https://patents.su/3-1493711-sistema-upravleniya-rabochim-processom-vibromashiny.html" target="_blank" rel="follow" title="База патентов СССР">Система управления рабочим процессом вибромашины</a>
Способ измерения резонансных частот и амплитуды вынужденных колебаний тонких пленок

Номер патента: 252390
Опубликовано: 01.01.1969
Автор: Векслер
МПК: H01J 9/42
Метки: амплитуды, вынужденных, колебаний, пленок, резонансных, тонких, частот
...1 колебаний исследуемой пленки 2 в диапазоне частот, оптического приемника 3, который регистрирует пропорциональные амплитуде коле банни пленки изменения светового потока, отраженного ее поверхностью, и измерительного блока 4.Для обеспечеппя измерений пленки с малымп прогибами оптический приемник должен 25 обладать высокой чувствительностью, что достигается прп его построении по автоколлимационной схеме.Свет от лампы б через конденсор б равномерно освещает левую половину растра 7, 30 расположенного в фокальн 011 плоскости Объектива 8.252390 Пред м ет изобретения Составитель Я. Б Техред 3. Н. чико Корректоры: В. Петрови А. Николаев аненк едактор С, И,каз 202/13 Тирани 480 ПодписноеНИИПИ Кок 1 итета по делам изобретений и открытий...
Способ контроля биморфного элемента датчика тонов короткова

Номер патента: 1405813
Опубликовано: 30.06.1988
Авторы: Васильцов, Каткова, Чеменцова, Шарапов
МПК: A61B 5/02
Метки: биморфного, датчика, короткова, тонов, элемента
...2, Точку соединения пьезоэлементов электрически соединяют с общим прово дом схемы. В биморфном элементе возбуждают резонансные изгибные колебания на частоте 4,5 кГц электрическим полем, подведенным к пьезоэлементу 1, регистрируют их по напряжению, возбуждаемому во втором пьезоэлементе, а о прочности соединения пьезоэлементов в биморфном элементе судят по амплитуде резонансных изгибных колебаний. При соединении одиночных пье зоэлементов в биморфный элемент на АЧХ биморфного элемента появляются резонансы, которые отсутствуют на АЧХ одиночного пьезоэлемента, Кроме того, изменяется форма кривой основного резонанса радиальных колебаний, При появлении трещин в одном из пьезоэлементов изменяется форма резонансной кривой в области...
Индикатор числа ускоряемых частиц с амплитудой бетатронных колебаний больше заданной

Номер патента: 148164
Опубликовано: 01.01.1962
Автор: Барабаш
МПК: H01J 47/00, H05H 13/04
Метки: амплитудой, бетатронных, больше, заданной, индикатор, колебаний, ускоряемых, частиц, числа
...числу частиц, находящихся вне экрана 4.Наведенный заряд, при равномерном распределении частиц по сечению пучка 5 неизменной интенсивности и постоянной амплитуды бетатронных колебаний, происходящих в другой плоскости, будет пропорционален амплитуде этих колебаний,148164Выполнение электродов парными исключает подачу ложных сигналов с электродов на схему умножения (совпадения) при смещении всего пучка 5 от центра камеры.Для нормализации масштаба индикатора 7 при изменении интенсивности пучка и амплитуды бетатронных колебаний используются сигналы с датчика 8 интенсивности и с датчика 9 бетатронных колебаний, Устройство для измерения вертикальных бетатронных колебаний повернуто относительно измерителя радиальных колебаний на...
Способ определения амплитуды механических колебаний объекта

Номер патента: 1430762
Опубликовано: 15.10.1988
Авторы: Волков, Мозурас, Оржекаускас, Рагульскис
МПК: G01H 9/00
Метки: амплитуды, колебаний, механических, объекта
...(и - 1)Т Пусть расстояние между датчиком скорости и вибрирующей поверхностью объекта изменяется по синусоидальному закону где Х - среднее расстояние; Х - амплитуда механических колебаний объекта; Ы - циклическая частота, Тогда выходной сигналбесконтактного датчика скорости в общем случае записывается в виде Из условия экстремума функции /с 1в выражении 13) ( = Э) получаемЙВТуравнение, связывающее параметр А с фазой максимума Ш (модуля выходного сигнала): где ( ю С) - фаза максимума функции г. С учетом того, что ( С)макс связана с интервалами времени 2. и Т и того, что аХ = Х 2- Х (Х 2 - среднее расстояние датчика от объекта в ближнем к объекту местоположении датчика), после несложных математических преобразований получаем рабочую формулу...
Способ определения амплитуды механических колебаний

Номер патента: 1689762
Опубликовано: 07.11.1991
Авторы: Мозурас, Рагульскис
МПК: G01H 9/00
Метки: амплитуды, колебаний, механических
...каждого сигнала (и-четное число, п 4). Для сигнала, соответствующего ближней от поверхности объекта точке расположения датчика, измеряют гак же интервал времени Ьт между моментами первого и (и+1)-го экстремумов. Затем определяют амплитуду хо механических колебаний объекта по формулехо.= Л х/(С 2 - С 1), (1) Индекс 1"1 относится к ближней точкеразмещения датчика, 1:=2 - к дальней точке.В случае применения любого бесконтактного датчика перемещения с выходнойхарактеристикой т (х) == Н (А+ х)", ЗОгде Н,А,1( - константы преобразования,х- расстояние между датчиком и объектом, производят дифференцирование повремени выходного сигнала датчика и выполняют аналогичные операции, как и в случае использования датчика скорости,Амплитуду колебаний...
Предыдущий патент: Устройство для нагрева и сушки минеральных материалов
Следующий патент: Устройство для измерения коэффициента сцепления дорожных покрытий
Случайный патент: Двигатель внутреннего сгорания