Преобразователь угла поворота вала в код
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1302430
Авторы: Андрианов, Виноградов, Гультяева, Скворцов



Текст
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНРЕСПУ БЛИН 191 4 :1 03 М 1/06 1/3 ПИСАНИЕ ИЗОБРЕТЕНИАВТОРСКОМУ СВИДЕТЕЛЬСТВУ(54) П ВАЛА В (57) И и ыт зован енств 7466 ческ в а ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ РЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТАКОДзобретение относится к автомавычислительной технике, может спользовано в системах преобраия информации и является усоверованием изобретения по авт.св.57, С целью повышения динамиустойчивости преобразователя .св, М путем расширения она однозначно определяемого перемещения в него введены дополнительный синусно-косинусный датчик 2с числом полюсов р/и, где р - числопар полюсов синусно-косинусного датчика 1, и = 2 , где Е - натуральноечисло, два дополнительных формирователя 8,9 импульсов и блок 11 согласования сигналов синусно-косинусныхдатчиков. Если в процессе измерениявозникло возмущение, приводящее кформированию в блоке 13 сравненияприращения ь, в последующем циклеизмерения в блоке 13 сравнения формируется приращение А с противоположным знаком. Таким образом,вносимое возмущением искажение ликвидируется в последуюЩем цикле измерения.При отсутствии возмущения информациядополнительного датчика 2 не используется для формирования выходногокода. 1 ил.аИ =И -Н1 Д 1 1302Изобретение относится к автоматике и вычислительной технике, можетбыть использовано в системах преобразования информации и является усовершенствованием устройства по авт.св.Ф 746657.Целью изобретения является повышение динамической устойчивости преобразователя путем расширения диапазона однозначно определяемого перемещения.На чертеже представлена функциональная схема преобразователя углаповорота вала в код.Преобразователь содержит основной 15синусно-косинусный датчик 1 с р-пара,ми полюсов, дополнительный синуснокосинусный датчик 2 с р/и-парами полюсов, где и - четное число, суммирующе-вычитающий блок 3, формирователи 204-9 импульсов, шифратор 10, блок 11согласования сигналов основного и дополнительного синусно-косинусных датчиков, регистр 12, блок 13 сравненияи сумматор 14. 25Преобразователь работает следующимобразом,Датчик 1 с р-парами полюсов эапитывается постоянным напряжением, ко-.торое моделируется датчиком, в ре- ЗОзультате чего на его выходах формируются сигналы синусоидальной Формы,сдвинутые по фазе друг относительнодруга на 90 эл.град.Эти сигналы счастотой, определяемой угловой скоростью 35вращения ротора датчика 1, поступаютна входы формирователей 4 и 5 импульсов и входы суммирующе-вычитающегоблока 3, с выхода которого снимаютсядва дополнительных синусоидальных сигнала, имеющих ту же частоту, что ивыходные сигналы датчика 1, но сдвинутые относиФельно них на 45 эл.град.Сдвиг между дополнительными огибающими составляет. 90 эл.град, С выходов 45суммирующе-вычитающего блока 3 дополнительные синусоидальные сигналы поступают на входы формирователей 6 и 7,По сигналам с выходов датчика 1 исуммирующе-вычитающего блока 3 формирователи 4-7 импульсов вырабатываютсигналы прямоугольной формы, поступающие на входы шифратора 10, Б последнем формируется трехраэрядный двоичный код. 55Одновременно датчик 2 угла с р/иМпарами полюсов.(где п=2 , где пасвнатуральное число) аналогичным образом.формирует сигналы синусоидальной 430 2формы, сдвинутые по фазе друг относительно друга на 90 эл.град., но счастотой в п раз меньшей по сравнениюс частотой сигналов с .выходов датчика 1. Сигналы с датчика 2 поступаютна входы формирователей 8 импульсов,вырабатывающих сигналы прямоугольнойФормы.Сигналы с выходов формирователей7 и 8 импульсов и сигнала. старшегоразряда с шифратора 10 поступают навходы блока 11 согласования.В этомблоке из сигналов датчика 2 угла исигнала старшегоразряда кода шифратора 10 формируется одноразрядный двоичный код путем согласования старшего разряда кода шифратора 10 и сигналов дополнительного датчика 2 (например, методом Ч-кода или в кодеГрея),На выходе блока 11 согласованияиз совокупности трехразрядного и одноразрядного двоичных кодов формируется четырехразрядный двоичный кодИ, положения вала внутри полюсногоделения датчика 2 с - парами по- и люс ов,Выходной код Н блока 11 согласования поступает непосредственно на вход блока 13 сравнения и в регистр 12, где запоминается на один такт обработки информации и в виде кода М поступает на другой вход блока 13 сравнения.В блоке 13 сравнения вырабатывается разность Ю, между текущим М и1 предыдущим И кодами; Если разность аИ, положительна и меньше восьми (половины десятичного значения максимального кода блока 11 согласования кодов), то ьИ суммируется с содержанием сумматора 14.Если разность ЬХ отрицательна и11 ВИ 1 с восьми, то разность ЪИ, вычитается иэ содержимого сумматора 14.Если ьХ с 0 ид И ) восьми, то в блоке 12 ф сравнения образуется новая разность ьИ = 16 +ЬЯ которая суммируется с содержимым сумматора 14, Если ьИ,)0 ий И,) восьми, то в блоке 13 сравнения образуется разность кМ = 16 - ьЛ которая вычитается из содержимого сумматора 14Таким образом,. на выходе блока 13 сравнения вырабатываются приращение13024 ля. 3кода аИ и знак приращения здЕпИ, которые .поступают на вход сумматора 14. Сумматор 14 вырабатывает сумму приращений И =саИ и знак зЦп И этой суммы, Сигналы М и з 1 ЕП М с выходов сумматора 14 являются выходными сигналами преобразователя, пропорциональными угловому перемещению. Дополнительный датчик (с дополнительными формирователями и блоком согласования) с числом полюсов с 180/сдТ, где оу - . мгновенная угловая скорость выходной оси датчика, Т - эквивалентный к цикл обработки информации, позволяет расширить диапазон однозначно определяемого перемещения.Так, например, в момент времени С - значение кода М поступает на один вход блока сравнения и в регистр, где запоминается на один такт обра ботки информации и в виде кода М поступает на другой вход блока срав - нения. Если за такт обработки произошло Искажение информации за счет динамических воздействий (либо помех) 25 и код предыдущего значения, записанный в регистризменился в следующий момент времени Г, на код И(текущее значение), то в блоке сравнения организуется приращение Д,=И,-И (равное З 0 и) Т либо величине помехи), Если в следующем такте воздействие прекратилось и код М снова стал равным И то в блоке сравнения организуется приращение Д = М - Я с противоположнымЗ2знаком и равное по абсолютной величинеСледовательно, в сумматоре после их сложения искажения информации исключаются, Если изменение информации 40 не связано с искажением, то указанные изменения в виде приращения фиксируются в сумматоре.Для однозначного определения знака и модуля приращения необходимо, 45 чтобы искажение (изменение) информации ( Ь ) за такт обработки не превосходило половины полюсного деления дополнительного датчика. Отсюда число 1с 180 50 полюсов дополнительного датчика с -- . Очевидно, что в неэкстремальных условиях работы накапливающего преобразователя информация дополнительногодатчика является пассивной и для обес 55печения функционирования не являетсяобязательной. ВНИИПИ Заказ 1225/56 Произв. полигр. пр-тие,30 4Таким образом, введение в тракт обработки преобразователя информации с дополнительного датчика Позволяет восстанавливать информацию после воздействия независимо от высокой разрешаюшей способности преобразователя с использованием датчика с высокой электрической редукцией с учетом степени динамического воздействия и эквивалентной частоты обработки информации и тем самым решить задачу снятия имеющихся противореЧий в классе накапливающих преобразователей, а также использовать с высокой эффективностью укаэанное решение в экстремальных условиях.Для нормального функционирования преобразователя при динамическом воздействии допускается за эквивалентный цикл обработки информации угол поворота дЫ ротора датчика 1, превосходящий в и раз число полюсов этого датчика, т.е,360 иаЫ с -- (2)т- р 2 Из формулы (2) следует, что динамическая устойчивость предлагаемого преобразователя возрастает в и раз при сохранении высокой разрешающей способности известного преобразоватеФормула изобретения Преобразователь угла поворота вала в код по авт.св. Р 746657, о т - л и ч а ю щ и й с я тем, что, с целью повышения динамической устойчивости преобразователя, в него введен дополнительный синусно-косинусный датчик с числом пар полюсов р/и, где р - число пар полюсов синусно-косиннусного датчика, и =2 , где 1 - натуральное число, два дополнительных формирователя импульсов и блок согласования сигналов синусно-косинусных датчиков, выходы дополнительного синусно-косинусного датчика через дополнительные формирователи импульсов подключены соответственно к первому и второму входам блока согласования сигналов синусно-косинусных датчиков, третий вход которого подключен к выходу старшего разряда шифратора, а выход - к дополнительным входам регистра и блока сравнения.Тираж 902Подписное г. Ужгород, ул, Проектная, 4
СмотретьЗаявка
3789544, 11.09.1984
ПРЕДПРИЯТИЕ ПЯ А-3724
СКВОРЦОВ АЛЕКСАНДР СЕРГЕЕВИЧ, ВИНОГРАДОВ МИХАИЛ АЛЕКСАНДРОВИЧ, АНДРИАНОВ ВАЛЕНТИН ИВАНОВИЧ, ГУЛЬТЯЕВА НИНА МИХАЙЛОВНА
МПК / Метки
Метки: вала, код, поворота, угла
Опубликовано: 07.04.1987
Код ссылки
<a href="https://patents.su/3-1302430-preobrazovatel-ugla-povorota-vala-v-kod.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь угла поворота вала в код</a>
Устройство кодирования блоков информации

Номер патента: 1302439
Опубликовано: 07.04.1987
Авторы: Боголюбова, Кабатянский, Рутковский
МПК: H03M 13/51
Метки: блоков, информации, кодирования
...сигнал синхронизации поступает с выхода вто- рого элемента И 9 на вход синхронизации регистра 19 второго вычислителя 2, на вход управления которого поступает второй сигнал управления с выхода четвертого элемента И 15, и определяют режим его работы. При этом низкий уровень сигнала управления задает режим циклического сдвига, а высокий уровень - режим занесения через соответствующие входы регистра 19. Кодирование символа х произвоо дится с учетом наличия в проверочной1 матрице Н (1) вектора столбца 0 что1о о о означает; у = х , у.= О, ух . Условие у = 0 обеспечивается во втором вычислителе 2 запретом занесения символа х в регистр 19. Для этого низкий уровень сигнала с единичного выхода второго триггера 14 запрещает прохождение...
Преобразователь синусно-косинусных сигналов в последовательность импульсов
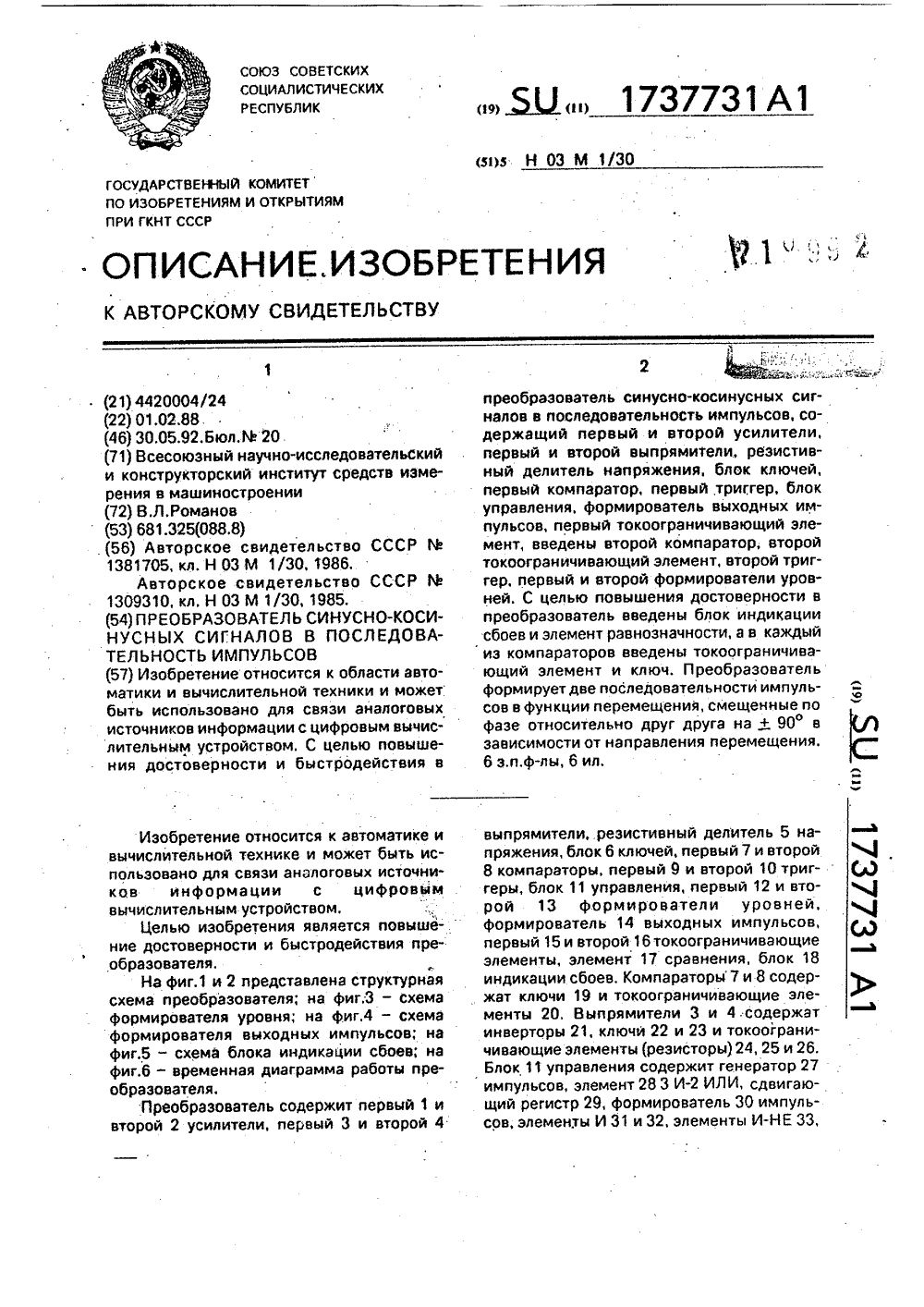
Номер патента: 1737731
Опубликовано: 30.05.1992
Автор: Романов
МПК: H03M 1/30
Метки: импульсов, последовательность, сигналов, синусно-косинусных
...выпрямителей 3 и 4 выполняется выходными сигналами формирователей 12 и 13 уровней, которые соответствуют выходным импульсам преобразователя. Свойство отставания выходного сигнала использовано для индикации сбоев в блоке 18, Выходные сигналы компараторов 46 и 47 блока 18 индикации, подключенных к выходам усилителей 1 и 2. сравниваются с выходными сигналами триггеров 35 формирователей 12 и 13 на элементах 48 и 49 сравнения. В случае рассогласования более, чем на один квадрат, в единицу установятся оба выходных сигнала элементов 48 и 49 и будет взведен триггер 51, Визуальная индикация и логический сигнал в следующий иерархический уровень измерительной системы позволяют исключить из рассмотрения недостоверную информацию, Запаса...
Фотоэлектрический преобразователь угловых перемещений в код

Номер патента: 506892
Опубликовано: 15.03.1976
Авторы: Комаровский, Кустов, Любовский, Малышко, Полянский, Салов, Яковлев
МПК: G08C 9/06
Метки: код, перемещений, угловых, фотоэлектрический
...механизма в виде импульсов на выходе формирующих преобразователей, каждый из которых передается по своим проводам. Это позволяет получать информацию о ряде позиционных точек, соответствующих определенным положениям механизма и определять эти положения с высокой точностью, а также позволяет в моменты появления сигналов в контрольных положениях механизма осуществлять сброс показаний реверсивного счетчика и вписывание числа, соответствующего положению контролируемого механизма в контрольной точке и, следовательно, восстанавливать соответствие выходного сигнала реверсивного счетчика положению контролируемого механизма при кратковременных исчезновениях питающего напряжения фотоэлектрического преобразователя угол - код.На фиг. 1...
Многоканальный преобразователь временных параметров в код

Номер патента: 603117
Опубликовано: 15.04.1978
Авторы: Березкин, Когге, Коротков
МПК: H03K 13/20
Метки: временных, код, многоканальный, параметров
...коммутатор 1 и ключ 3 начинает поступать в счетчик 4 периодов, в который по заднему фронту импульса Сброс введен код первой проверки из программного устройства 7,Пергый импульс со счетчика 4 псриодов посту- пает ца вход триггера 43, который .открывает ключ 11, и эталонная частота с выхода генератора 10 через сборку 12 начинает поступать в измерительный счетчик 9. Г 1 о переполнению счетчика 4 срабатывают триггеры 5 и 13, перекрываюцие ключи 3 и 11. В процессе заполнения счетчика 9 опрашивается блок 8 сравнения кодов Норма и Нет нОРмы.В случае получения с него сигнала Нет нормы ца выходе элемента совпадения 15 появляется разрешающий сигнал, а результат проверки выдастся на печать через элементы 17 и 28 совпадения, при этом режим...
Резонатор к частотным датчикам первичной информации

Номер патента: 679837
Опубликовано: 15.08.1979
Авторы: Волохов, Корольков, Щепетов
МПК: G01L 11/00
Метки: датчикам, информации, первичной, резонатор, частотным
...ребра находятся в узлах изгибной деформлции 1Эта ориентация является более предпочтитель. ной, так как при этом ребра неподвижны,Резонатор состоят из основания 1, на кото.ром закреплен цилиндрический резояатор 2 с четырьмя ребрами 3, выполненный из токо- фф проводящего материала и закрытый заглушкой 4, в которой закреплен штуцер 5, предназначен. ный для вакуумирования внутренней полости резонатора 2, В последней размещен постоянный магнит 6, выполненныи в виде четырехч И полюсяика, пространство между полюсами которого заполнено изолирующим материалом 7.На поверхности изолирующего материана раз.ЗЭ мешены электроды 8 емкостяого приемника.Магнитные полюсы 6 и электроды 8 образуют цилиндрическую поверхность, концентричную внутренней...
Предыдущий патент: Преобразователь цифрового кода в интервал времени
Следующий патент: Способ измерения динамической погрешности аналого-цифровых преобразователей
Случайный патент: Генератор базисных функций радемахера-уолша