Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
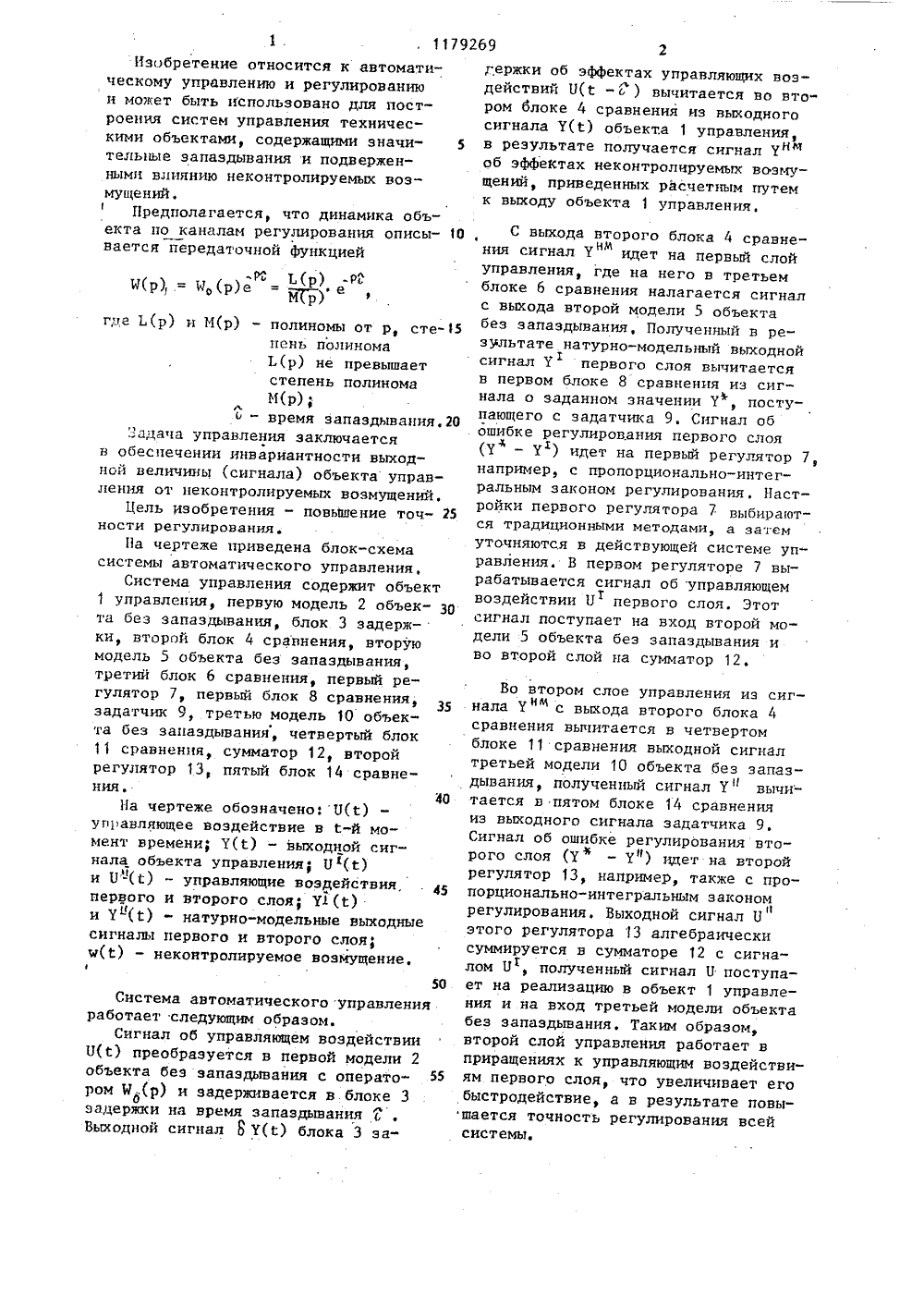
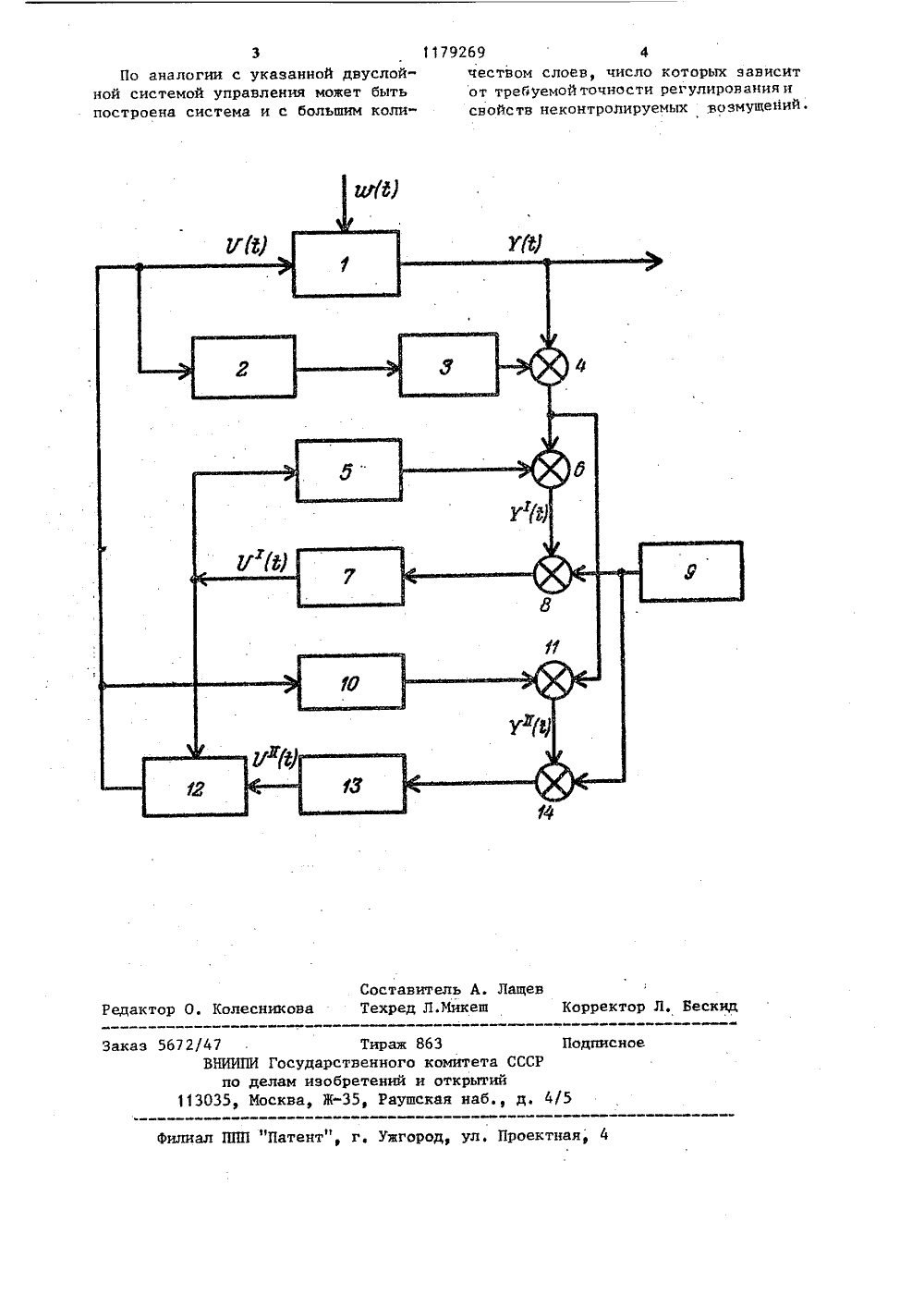
(71) Сибирский ордена ТрудовогоКрасного Знамени металлургическийинститут им. Серго Орджоникидзе,Кемеровский государственный университет.и Красноярский ордена Трудового Красного Знамени химический комбинат "Енисей"(54)(57) СИСТЕМА УПРАВЛЕНИЯ, содержащая объект управления, первый регулятор, последовательно включенныезадатчик и первый блок сравнения,последовательно включенные первуюмодель объекта без запаздывания,блок задержки, второй блок сравнения и третий блок сравнения, вход первой модели связан с .входом объекта управления,о т л и ч а ю щ а я - с я тем, что, с целью повышения точности регулирования, в нее введены вторая и третья модели объекта без запаздывания, последовательно включенные четвертый блок сравнения, пятый блок сравнения, второй регулятор и сумматор, выход которого соединен с входами объекта управления и третьей модели объекта без запаз" дывания, выход объекта управления подключен к второму входу второго блока сравнения, выход первого ре- ф гулятора соединен с вторым входом сумматора и через последовательно включенные вторую модель объекта без запаздывания, третий блок сравнения и первый блок сравнения - соС своим входом, первый вход четвертого блока сравнения соединен с выходом третьей модели объекта без запаздывания, а второй вход - с выходом второго блока сравнения, вы" ход задатчика подключен к второму входу пятого блока сравнения.Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем управления техническими объектами, содержащими значи тельггые запаздывания и подверженными влиянию неконтролируемых возмущений.Предполагается, что динамика объекта по каналам регулирования описы О вается передаточной функциейър Ь (р) -Р(",йр) = 1 ф(р)е МТ-) фм ргде Ь(р) и М(р) - полиномы от р, сте пень попиномаЬ(р) не превышаетстепень полиномам(р);ь - время запаздывания.20"адача управления заключается в обеспечении инвариантности вьгходнай величины (сигнала) объекта управления от неконтролируемых возмущений.Цель изобретения - повь 1 шение точ ности регулирования.На чертеже приведена блок-схема системы автоматического управления,Система управления содержит объект 1 управления, первую модель 2 объек та без запаздывания, блок 3 задержки, второй блок 4 сравнения, вторую модель 5 объекта беэ запаздывания, третий блок 6 сравнения, первый регулятор 7, первый блок 8 сравнения, задатчик 9, третью модель 10 объекта без запаздывания, четвертый блок 1 1 сравнения, сумматор 12, второй регулятор 13, пятый блок 14 сравнениями40На чертеже обозначено:П(й) управляющее воздействие в й-й момент времени; У(г.) - выходной сигнала объекта управления; Пг(й) и Б -(1;) - управляющие воздействия, первого и второго слоя; У(й) и У(й) " натурно-модельные выходные сигналы первого и второго слоя; ч(С) - неконтролируемое возмущение,50Система автоматического управленияработает следующим образом.Сигнал об управляющем воздействииЦ(С) преобразуется в первой модели 2объекта без запаздывания с оператором У.,(р) и задерживается в блоке 3задержки на время запаздывания Я .Выходной сигнал о У(й) блока 3 эагержки об эффектах управляющих воздействий Яй -) вычитается во втором блоке 4 сравнения из выходного сигнала У(1) объекта 1 управления, в результате получается сигнал У" об эффектах неконтролируемых возмущений, приведенных расчетным путем к выходу объекта 1 управления.С выхода второго блока 4 сравнения сигнал У идет на первый слойнмуправления, где на него в третьем блоке 6 сравнения налагается сигнал с выхода второй модели 5 объекта без запаздывания, Полученный в результате натурно-модельный выходной сигнал г первого слоя вычитается в первом блоке 8 сравнения из сигнала о заданном значении У , постулающего с эадатчика 9, Сигнал об . ошибке регулирования первого слоя (У - У ) идет на первый регулятор 7,4 Хнапример, с пропорционально-интегральным законом регулирования. Настройки первого регулятора 7 выбираются традиционными методами, а затем уточняются в действующей системе управления. В первом регуляторе 7 вырабатывается сигнал об управляющем воздействии Б первого слоя. Этот сигнал поступает на вход второй модели 5 объекта без запаздывания и во второй слой на сумматор 12.Во втором слое управления из сигнала У "м с выхода второго блока 4 сравнения вычитается в четвертом блоке 11 сравнения выходной сигнал третьей модели 10 объекта без запаздывания, полученный сигнал У вычи- тается в пятом блохе 14 сравнения из выходного сигнала задатчика 9. Сигнал об ошибке регулирования второго слоя (У - У ) идет на второй регулятор 13, например, также с пропорционально-интегральным закономн регулирования, Выходной сигнал У этого регулятора 13 алгебраически суммируется в сумматоре 12 с сигналом Ц , полученный сигнал Б поступает на реализацию в объект 1 управления и на вход третьей модели объекта без запаздывания. Таким образом, второй слой управления работает в приращениях к управляющим воздействи" ям первого слоя, что увеличивает его быстродействие, а в результате повышается точность регулирования всей системы.(олеснико Редакто орректор Л. Бескид 863 о комитета ССС и открытий шская наб д, Заказ писное Филиал ППП "Патент", г. Ужгород, ул. Проектная,По аналогии с указанной двуслойной системой управления может быть построена система и с большим коли 2/47 ТирВНИИПИ Государственнпо делам изобретении13035, Москва, Ж, Р 1379269 чеством слоев, число которых зависит от требуемойточности регулированияи свойств неконтролируемых возмущений.
СмотретьЗаявка
3764619, 01.06.1984
СИБИРСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ МЕТАЛЛУРГИЧЕСКИЙ ИНСТИТУТ ИМ. СЕРГО ОРДЖОНИКИДЗЕ, КЕМЕРОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ, КРАСНОЯРСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ХИМИЧЕСКИЙ КОМБИНАТ "ЕНИСЕЙ"
АВДЕЕВ ВИТАЛИЙ ПАВЛОВИЧ, ПОПОВ ВЛАДИМИР ЮРЬЕВИЧ, МЫШЛЯЕВ ЛЕОНИД ПАВЛОВИЧ, КАРТАШОВ ВЛАДИМИР ЯКОВЛЕВИЧ, КИСЕЛЕВ СТАНИСЛАВ ФИЛИППОВИЧ, СТЕПАНИЩЕВ ВЛАДИМИР КОНСТАНТИНОВИЧ, ШТЕФАН ИВАН АДОЛЬФОВИЧ, ПЯТКОВ ВЛАДИМИР СТЕПАНОВИЧ, АНУФРИЕВ ВАЛЕРИЙ СТЕПАНОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки:
Опубликовано: 15.09.1985
Код ссылки
<a href="https://patents.su/3-1179269-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Адаптивная система автоматического управления для нестационарных объектов с запаздыванием

Номер патента: 1451644
Опубликовано: 15.01.1989
Авторы: Као, Нгуен, Пичугин, Рауль
МПК: G05B 13/02, G05B 13/04
Метки: адаптивная, запаздыванием, нестационарных, объектов
...времени 61между импульсами на выходах дифференцирующих устройств 9 и 10. Ь г. = пТ, где и - количество импульсов; Т - период импульсов; ЬС э - время задержки объекта управления и модели, которое вычитается сумматором 31 из времени за-. держкихранимом в регистре 29, и передается на информационный вход регистра 29-Аг.зЭлемент И 32 по сигналам с второго выхода счетчика 35 и выхода элемента ИЛИ 37 формирует сигнал. по переднему фронту которого Формирователь 20 формирует сигнал управления, в регистр 29 записывается значение с., времени задержки, а по заднему фронту происходит установка в нулевое состояние счетчиков 34 и 35 и триггера 36. В том случае, если на входы элемента ИЛИ 37 первым поступает импульс с выхода второго...
Пневматический блок запаздывания сигнала

Номер патента: 249109
Опубликовано: 20.02.2006
Авторы: Вертушкин, Головин, Головина, Катков
МПК: B64C 13/36, G05D 16/06
Метки: блок, запаздывания, пневматический, сигнала
Пневматический блок запаздывания сигнала, преимущественно для управляющих устройств летательных аппаратов, содержащий входной патрубок, дроссели и емкость с выходным патрубком, отличающийся тем, что, с целью повышения надежности работы и увеличения постоянной времени запаздывания, он выполнен в виде трех двухсопловых мембранных элементов с последовательно соединенными соплами, емкость подключена к трубопроводу, соединяющему глухие камеры каждого из двухсопловых мембранных элементов, и через постоянные настраиваемые дроссели - к соплам двухсопловых мембранных элементов, а сопловая камера третьего двухсоплового мембранного элемента снабжена входным патрубком.
Пневматический прерывистый блок запаздывания

Номер патента: 181401
Опубликовано: 01.01.1966
Авторы: Воронежский, Колойденко
МПК: G06D 1/02
Метки: блок, запаздывания, пневматический, прерывистый
...содержащее емкость 8 н контакты 9 и 10. Выход устройства Р снимается с задержки 11 ца такт, присоединенной к емкости 12 пульсирующего сопротивления 12 - 13 - 14, один вход которого присоединен к ра бочей камере 2 емкости 1, а другойк ли.ции с давлением Р,. Задержка на такт и пульсирующие сопротивления управляются давчецием РУстройство работает следующим образом.15 При Р, =1 емкость 8 через контакт 10 заполняется давлением Ра величина 1 емкости рабочей камеры равна нулю (Ъ 2, =0), так как управляющая камера Зчерез контакт б соединена с давлением питания. Количество 20 газа в емкости равно 25 где Р, - абсолютная величина входцого дав.ления,Я - газовая настоян ия,О - абсолютная температура газа.При Р, =О емкость 8 через контакт 9...
Система управления для объектов с запаздыванием

Номер патента: 648947
Опубликовано: 25.02.1979
Авторы: Ашимов, Заграничный, Сыздыков, Тохтабаев
МПК: G05B 13/02
Метки: запаздыванием, объектов
...2, выход когорого соединен с сумматором 10.Система работает следующим образом.При изменении сигналах и/или задания Ход появляегся сигнал рассогласования ЬХ, который отрабатывается регулятором 2. При данном упраЬлении черезупреждающую вторую модель 7 объект 3управления находится вне замкнутого конгура управления и не влияег на устойчивость замкнутой системы. При отработкесигнала рассогласования Ь Х сигнал свыхода второй модели 7 будет иметьодинаковое знечение с выходным сигналомчерез время запаздывания. Если параметры моделей 5 и 7 не адекватны параметрам объекта 3 управленияго в самой системе предусматривается их перестройка.Перестройка параметров моделей 5 и 7 проводится через блок 8 подстройки, который согласно определенным...
Система экстремального управления для объекта с запаздыванием

Номер патента: 993206
Опубликовано: 30.01.1983
Авторы: Ельцов, Изаак, Калиногорский, Прокопьев, Фомин, Хорошавин, Цымбал
МПК: G05B 13/02
Метки: запаздыванием, объекта, экстремального
...условий 3 на первый информационный вход первого ключа 8 подается сигнал -сжатой во времени в мас-зштабе 5 траектории изменения управляющего воздействия ч(с ), а с в очрого выхода на второй информационныивход третьего ключа 10 подаешься сигнал о сжатой во времени (в масштабе 5) траектории изменения контролируемого возмущения 2 (с ),10 и 15. Каждый цикл состоит из двухинтервалов времени длительностьюТ 5интервала задания начальныхЬусловий и интервала прогноза.На первом интервале времени проис"ходит задание начальных условий. Приэтом сигналами с выхода блока 7 синхронизации ключи 8, 9, 10 и 15 устанавливаются в следующие позиции, Второй ключ 9 разомкнут,Первый ключ 8 соединяет первыйвыход блока 3 задания начальных условий с первым входом...
Предыдущий патент: Адаптивная система управления
Следующий патент: Устройство программного управления
Случайный патент: Дискретный индуктивный уровнемер